В данной статье представлен обзор змееподобных роботов, их конструктивных особенностей, принципов работы и областей применения. Рассматриваются технологии, используемые при создании роботов, имитирующих движения змей, а также перспективы их использования в различных сферах.
Ключевые слова: змееподобные роботы, ползающие мобильные роботы.
Змееподобные роботы представляют собой передовые механизмы, способные выполнять уникальные задачи в области исследований и инженерии. Их гибкие и маневренные конструкции позволяют эффективно функционировать в труднодоступных местах, таких как трубопроводы и глубоководные океанские впадины. Эти роботы открывают новые возможности для научных исследований и работы в труднодоступных местах, расширяя горизонты в различных областях науки и технологий.
Змееподобный робот с всенаправленными колесами Университета Осаки (Япония)
Данный змееподобный робот (рис. 1) был вдохновлен и основан на роботе Хиросе АХМ III. Однако был изменен подход к механизму движения робота на диаметрально противоположный [1]. В данном устройстве колеса являются активными, а шарниры пассивными. Важной конструктивной особенностью является то, что активные колеса — всенаправленные. Всенаправленное колесо — такой тип колеса, который позволяет звену робота двигаться в любом направлении. Рассмотрим принцип действия колеса. Всенаправленные колеса состоят из нескольких дисков (обычно из двух или трех) способных вращаться независимо друг от друга. Работают по принципу индивидуального вращения каждого колеса. В случае рассматриваемого робота при вращении колес в одном направлении звено механизма отклоняется вбок, а при вращении колес в разных направлениях звено будет перемещаться вперед или назад. Также на концах первого и последнего звеньев установлены пассивные пары колес для обеспечения устойчивости робота на плоскости. Опишем подробнее управляющую роботом систему. Каждое звено имеет в своем составе микроконтроллер, питающий элемент, двигатель и датчики. Угол поворота звена измеряется потенциометром, установленным на пассивном соединении, а скорость вала двигателя энкодером. Измеренные данные передаются по шине связи другим микроконтроллерам. Информация от датчиков позволяет регулировать углы поворота звеньев относительно друг друга и скорость вала двигателя для обеспечения правильного выполнения заданной ползающей походки. Робот состоит из трех звеньев, каждое звено соединено цилиндрической парой. Длина робота составляет 540 мм, масса равна 1 кг. Устройство предназначено для движения по горизонтальной плоскости.
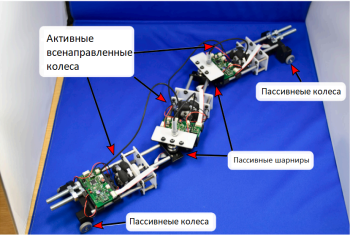
Рис. 1. Змееподобный робот с активными всенаправленными колесами
Змееподобный робот Университета Карнеги-Меллон (США)
Проект был запущен в 1990-х годах в лаборатории Biorobotics Lab Университета Карнеги-Меллон. Основной целью было создать робота (рис. 2), способного маневрировать в ограниченных и сложных пространствах, подобных тем, где успешно передвигаются змеи [2]. Исследователи изучили движения змей, чтобы понять, как они передвигаются в различных средах, включая узкие туннели, неровные поверхности и сыпучие материалы.

Рис. 2. Змееподобный робот Университета Карнеги-Меллон
Каждый сегмент может двигаться независимо, что позволяет роботу изгибаться и ползти подобно змее. Для движения каждого сегмента используются компактные и мощные приводы. Приводы обычно питаются от провода. Робот оснащен разнообразными сенсорами, такими как камеры, акселерометры, гироскопы и контактные датчики. Эти сенсоры собирают данные о окружающей среде и состоянии робота, что помогает системе управления принимать решения и корректировать движения. Для управления роботом используются сложные алгоритмы, которые синхронизируют движения сегментов для достижения нужного результата. Одним из главных применений устройства являются спасательные операции. Благодаря своей гибкости и маневренности, робот может проникать в узкие пространства, обрушенные здания и другие сложные для доступа места, помогая искать выживших. Механизм используется для инспекций и обслуживания труднодоступных объектов, таких как трубопроводы, канализации и промышленные установки. Робот способен проникать в узкие трубы и собирать данные с помощью встроенных сенсоров и камер. В военной сфере Робот может использоваться для разведки и обнаружения взрывных устройств или других опасных объектов.
ЗМЕЕЛОК-3 ЦНИИ РТК (Россия)
На протяжении нескольких лет исследователи и инженеры из ЦНИИ РТК создавали и модернизировали прототипы змееподобных роботов. Последним на данный момент является ЗМЕЕЛОК-3 (разработан в 2012 г., модернизирован в 2018 г.) (рис. 3). Это третий робот от данной команды. Представленное устройство состоит из элементов поочередно соединенных друг с другом. Количество звеньев варьируется от 10 до 20. Данный механизм способен выполнять гораздо больше походок, чем роботы, рассмотренные ранее. Это как наиболее эффективное на разных видах рельефах боковое движение, так и движение качением, нетипичное для живых змей. Также робот может вставать в позу «Кобры».

Рис. 3. ЗМЕЕЛОК-3
Каждое соединение представляет из себя шарнир Гука, что позволяет перемещаться звену в двух плоскостях. В роли двигателей робота выступают сервоприводы. Кожухи изготавливаются из полиуретана путем заливки материала в силиконовые формы. Робот оснащен видеокамерой и светодиодами на «голове робота», а также датчиками обратной связи для мониторинга состояния робота и внешней среды. Робот работает на специализированном программном обеспечении, которое включает в себя алгоритмы управления и нахождения положения каждого модуля робота [3] в пространстве, планирования маршрутов, обработки данных с сенсоров и многое другое. Это программное обеспечение обеспечивает эффективное взаимодействие между различными компонентами системы и позволяет роботу выполнять разнообразные задачи. Основной задачей рассматриваемого устройства является работа в труднодоступных местах в том числе инспекция трубопроводов. Оно представляет собой эффективный инструмент для обнаружения и оценки состояния трубопроводных систем. Конструкция робота, о которой говорилось ранее позволяет ему проникать в труднодоступные участки трубопроводов и проводить детальный осмотр их внутренних поверхностей. Кроме того, «Змеелок-3» осуществляет оценку состояния трубопроводов, выявляя коррозию, износ, трещины и другие повреждения, которые могут привести к авариям или потере эффективности системы. Благодаря своей гибкости и маневренности, робот способен проникать в труднодоступные места, такие как участки трубопроводов под землей или внутри сооружений, что позволяет проводить полную инспекцию всей системы без необходимости разбирать её. Робот передает оператору информацию о состоянии трубопроводов в реальном времени, что позволяет оперативно реагировать на выявленные проблемы и планировать необходимые ремонтные работы. Также эти данные могут быть использованы для составления отчетов о состоянии трубопроводной системы и планирования предупредительного обслуживания. Таким образом, робот «Змеелок-3" представляет собой важный инструмент для проведения инспекции трубопроводов, обеспечивая высокую точность и эффективность в обнаружении и оценке состояния этих объектов.
Литература:
- Yuki Takagi, Masato Ishikawa, Koichi Osuka Development and Control Experiment of a Snake-Like Robot with Controllable Side-Thrust Links // IFAC PapersOnLine. — 2019. — № 52(15). — С. 229–234.
- Rollinson D. Control and Design of Snake Robots. — Pittsburgh: School of Computer Science Carnegie Mellon University, 2014. — 203 p.
- Иванов А. А., Шмаков О. А., Демидов Д. А. Экспериментальное исследование змеевидного робота «ЗМЕЕЛОК-3» // Научно-технические ведомости СПбГПУ. — 2013. — № 1. — С. 132–138.

