В данной статье представлен ферромагнитный плавающий робот, предложены варианты модернизации этого робота для увеличения его функциональности и скорости путем изменения формы головки и внедрения индуктора тока для создания напряжения, способствующего разрушению тромбов.
Ключевые слова: микро-роботы, медицинские роботы, плавающие роботы, ферромагнитные плавающие роботы.
This paper presents a ferromagnetic floating robot, offers options for upgrading this robot to increase its functionality and speed by changing the shape of the head and the introduction of a current inductor to create a voltage that contributes to the destruction of blood clots.
Keywords: micro robots, medical robots, floating robots, ferromagnetic floating robots.
Микроскопические роботы, которые могут передвигаться внутри нашего организма, уже давно перестали быть чем-то невероятным, и использование микроскопических устройств и даже роботов в медицине становится в последнее время чем-то само собой разумеющимся. Основными разработчиками нано и микро-роботов в настоящее время являются ведущие специалисты из университетов США и Великобритании. Совсем недавно специалисты из Эксетерского университета (Великобритания) представили, пожалуй, одну из, пожалуй, самых интересных. Она основана на создании роботов с ферромагнитной головкой, на базе которого и будет модернизация.
«Роботы-пловцы» представляют собой головку из ферромагнитного материала и цепочку из зерен ферромагнитных сплавов, составляющих из себя подвижный хвостик. Эти роботы при помощи внешнего магнитного поля можно направлять в нужный участок сосудистой системы пациента.
Устройство робота довольно просто: головка, имеющая в своем составе неодим, железо и бор, что позволяет иметь ей хорошие ферромагнитные свойства и выполненная в форме куба, связывается с управляющим устройством.
На другом конце микро-робота располагается подвижный жгутик (или хвостик). Жгутик одноклеточных и некоторых клеток животных (например, сперматозоидов), двигаясь, создает завихрения потоков жидкости, что и позволяет двигаться. Жгутик робота делает то же самое, за счет электромагнитных импульсов того же самого управляющего устройства.
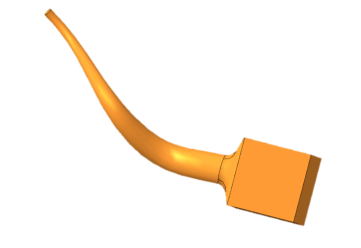
Рис. 1. Изображение ферромагнитного плавающего робота в исходном состоянии
Характеристики ферромагнитного плавающего робота
|
Характеристика |
Величина |
|
Размер головки (ДШВ) |
0,5 х 0,5 х 0,5 мм |
|
Длина жгутика |
0,5–3 мм |
|
Номинальная частота колебаний жгутика |
80–100 Гц |
|
Максимальная частота колебаний жгутика |
140 Гц |
|
Скорость перемещения |
2–12 мм/с |
|
Частота внешнего магнитного поля |
0,5–5 мкТл |
|
Масса |
7–12 мг |
|
Масса полезной нагрузки |
до 10 мг |
Скоростью миниатюрного робота можно управлять, используя магнитное поле с частотой менее 3,5 микротесла. При этом, изменяя длину жгутика, удалось добиться того, что можно четко контролировать перемещение робота, заставляя двигаться в требуемую сторону.
За основу для модернизации примем данного робота. Для повышения его функциональности могут быть рассмотрены следующие версии модернизации:
- изменение формы кубической ферромагнитной головки на форму вытянутого многоугольника для улучшения гидродинамического качества, снижения вязкого трения;
- создание индукционного электрического тока за счет намотки на основание хвостика робота тончайших золотых или платиновых нитей, для улучшения чистящих свойств нано-робота сосудов от тромбов и отложений.
Применение сложной краеугольной вытянутой формы позволит роботу-пловцу свободнее передвигаться по сосудам человека, это подтверждается элементарными законами гидродинамики, за счет уменьшения лобового сопротивления, а большее количество углов позволит легче расправляться с тромбами и отложениями. На рисунке 2 представлена наглядная картина обтекания головки квадратного сечения и многоугольного. Несмотря на это, при увеличении количества углов, стенки сосуда остаются в безопасности, за счет своей упругой структуры, отложения же подвергаются неизбежному разрушению.
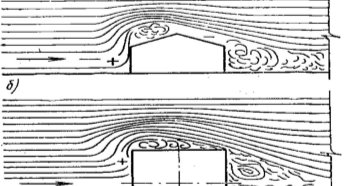
Рис. 2. Картина обтекания тел многоугольного и квадратного сечений
Создание индукционного тока необходимо так же для облегчения удаления тромбов и различных отложений на стенках сосудов за счет электрических импульсов от головки, к которой подключена катушка из намотки нескольких витков золотой или платиновой тончайшей нити. Расчетное значение тока при номинальном режиме работы: I = 6∙10–23 A.
Получившийся ток пренебрежительно мал для организма и сердечно-сосудистой системы в целом, но воздействие этого тока на стенки сосудов и вещества тромбов вызывает микросокращение стенок сосудов и тем самым воздействуя на неблагоприятные отложения не только со стороны тока крови, но и со стороны стенок сосуда. Предыдущий способ модернизации является неотъемлемой частью для выполнения данного условия, ведь чем больше точек воздействия тока на сосуд (чем больше углов на головке), тем более продуктивнее будет идти процесс очищения стенок сосудов. Наглядная 3D-модель показана на рисунке 3.
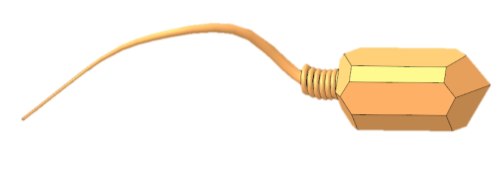
Рис. 3. Упрощенная 3D-модель модернизированного ферромагнитного плавающего робота с улучшенной многогранной головкой и индуктором для создания токов малой величины
Таким образом, был модернизирован ферромагнитный плавающий робот, способный теперь не только производить движение по сосудам, но и очищать их от ненужных образований. Данные модернизации могут обеспечить увеличение скорости движения и очищение от отложений на 15–20 %. Тип данного робота находится только стадии доработки и испытаний, предложенная модель является лишь одним из вариантов модернизации.
В перспективе — создание на базе данных микро- и нано-роботов модулей, способных на таргетную доставку лекарственных средств или же в качестве устройства диагностики заболеваний и мониторинга за состоянием здоровья.
Литература:
- Концепция развития робототехники / Е. В. Поезжаева // Концепция развития робототехники: учебное пособие. / М-во образования и науки Рос. Федерации, Перм. нац. исслед. политехн. ун-т. — Пермь: Изд-во ПНИПУ, 2018. — 439 с. Утв. РИС ун-та в качестве учеб. пособия.
- https://www.innoros.ru/news/14/03/meditsinskie-mikroroboty
- https://mysteryworld.info/mikroskopicheskie-roboty/
- http://www.ngpedia.ru/id653434p4.html

