В данной статье рассматриваются методы интеллектуального управления беспилотным воздушным судном, в частности квадрокоптером. Рассмотрена процедура предполётной настройки контроллера, обучения регуляторов стабилизации. Представлена информационная технология, реализующая интеллектуальное управление с повышением уровня надежности в условиях ограниченной информации об объекте управления и воздействии помех.
Целью исследования является повышения качества управления за счёт интеллектуализации системы управления, не изменяя нижний аппаратный уровень.
Ключевые слова : беспилотные летательные аппараты, управление квадрокоптером, нечёткий регулятор, интеллектуальная система управления.
This article explores methods of controlling a quadcopter, creating a filter to compensate for errors, and suggests incorporating elements of fuzzy logic in conditions of limited information about the controlled object and the influence of disturbances.
The research aims to reduce motion errors and precisely determine the position in the Cartesian coordinate system.
Keywords: unmanned aerial vehicles, quadcopter control, fuzzy controller.
Введение
Беспилотные летательные аппараты (БПЛА) представляют собой инновационное направление в авиационной технологии, олицетворяя симбиоз передовых разработок в области робототехники и беспроводной связи. Эти летающие устройства, лишённые экипажа, нашли широкое применение в различных областях, где их использование оказывается более эффективным и безопасным по сравнению с традиционными методами. От проведения разведывательных миссий в опасных районах до введения наблюдения и выполнения задач в условиях, где присутствие человека может быть нежелательным или даже опасным, беспилотные летательные аппараты стали неотъемлемой частью современных технологических решений.
В рамках данной статьи освежим понимание ключевого процесса, который является неотъемлемой частью практически любого проекта управления беспилотным летательным аппаратом (БПЛА). Этот процесс, несмотря на то, будете ли вы разрабатывать свой контроллер для БПЛА или нет, играет решающую роль в обеспечении эффективной и безопасной работы беспилотного устройства.

Рис. 1. Ключевые этапы в разработке системы управления БПЛА
БПЛА с четырьмя вращающимися несущими винтами именуются квадрокоптерами. Добавление дополнительных винтов позволяет создавать гексакоптеры и октокоптеры. Эти разнообразные летательные аппараты, включая вертолеты и менее известные автожиры, объединяются в единое семейство под названием «rotorcraft», где основным элементом генерации подъемной силы служит вращающееся крыло, в отличие от неподвижного.
Несмотря на общую основу в виде винтокрылых транспортных средств, каждый из них обладает уникальной динамикой и, следовательно, требует различных стратегий управления. В данной статье рассмотрим разработку системы управления квадрокоптером и рассмотрим методы минимизации возможных ошибок, разберёмся с особенностями динамики этого вида БПЛА и предложим методы, направленные на снижение потенциальных ошибок в процессе управления.
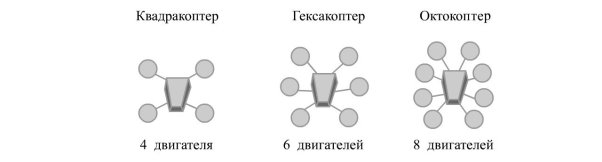
Рис. 2. Виды мультикоптеров с разным количество несущих винтов
Существуют две конфигурации квадрокоптера — с расположением двигателей в виде буквы «X» и «+». Единственное различие между ними заключается в том, на какие двигатели посылаются команды для стабилизации или вращения дрона. Несмотря на схожесть основных концепций управления для обеих конфигураций, текущей основной проблемой является общая сложность управления.
При разработке алгоритма управления беспилотником необходимо учесть, что квадрокоптер представляет собой систему с ограниченным приводом, имея всего 4 двигателя и 6 степеней свободы (три поступательных и три вращательных направления). Некоторые направления движения не могут быть осуществлены напрямую, например, движение влево без предварительного поворота.

Рис. 3. Диаграмма СУ
Для решения проблемы ограниченного привода необходимо разработать систему управления, которая эффективно связывает вращение двигателей и генерацию тяги.
Рассмотрим генерацию тяги и крена с использованием 4 двигателей и то, как направление вращения позволяет разделить поступательное и вращательное движение. Двигатель создаёт тягу, вращая пропеллер и направляя поток воздуха вниз. Это вызывает силу реакции, которая увеличивается при правильной установке двигателя, когда сила прикладывается через центр тяжести объекта. В этом случае объект движется в чисто поступательном движении.
Чтобы компенсировать реактивный крутящий момент от вращения двигателей, ориентированных в одном направлении, мы можем направить двигатели в противоположных направлениях. Добавим вторую планку с двумя дополнительными двигателями, создавая конфигурацию квадрокоптера, позволяющую парение.
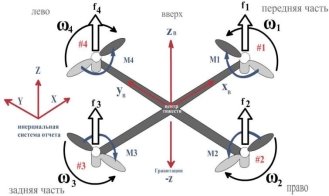
Рис. 4. Движение и управление квадрокоптером
Таким образом команды двигателем будет сочетания требуемой величины тяги, угла крена, рысканья, которыми мы можем управлять.
Таблица 1
|
Двигатели |
Тяга |
Рыскание |
Тангаж |
Крен |
|
Мотор 1 (передний правый) |
увеличить |
увеличить |
увеличить |
увеличить |
|
Мотор 2 (передний левый) |
увеличить |
уменьшить |
увеличить |
уменьшить |
|
Мотор 3 (задний правый) |
увеличить |
уменьшить |
уменьшить |
увеличить |
|
Мотор 4 (задний левый) |
увеличить |
увеличить |
уменьшить |
уменьшить |
Квадрокоптер представляет собой сложную систему, объединяющую ряд ключевых компонентов для обеспечения его функциональности:
1. Батарея и Микроконтроллер: батарея предоставляет электропитание для всей системы, а микроконтроллер управляет основными функциями квадрокоптера.
2. Блоки Электронного Регулятора Оборотов (E. S. C) : каждый мотор квадрокоптера соединён с блоком E. S. C, который регулирует скорость вращения моторов.

Рис. 5. Упрощённая схема квадрокоптера
3. I. M. U (Инерциальный Измерительный Блок) : I. M. U состоит из трехосевого акселерометра для измерения линейного ускорения и трехосевого гироскопа для измерения угловой скорости. Эта информация используется для стабилизации, управления, оценки положения и скорости вращения квадрокоптера.
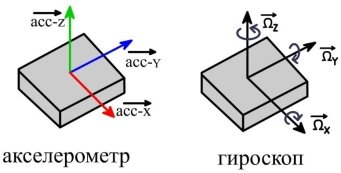
Рис. 6. Схема гироскопа и акселерометра
При необходимости можно добавить дополнительные датчики согласно нашим требования к управлению, например:
4. Ультразвуковой Датчик : дополнительный датчик, который используется для измерения вертикальных расстояний. Он посылает высокочастотный звуковой импульс, оценивает время, которое требуется для его отражения, и измеряет расстояние.
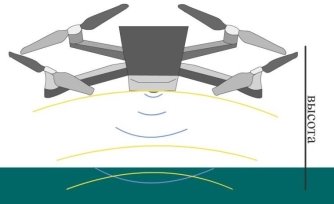
Рис. 7. Схема принципа работы ультразвукового датчика
5. Камера с технологией оптического потока : камера снимает кадры со скоростью 60 кадров в секунду и использует технологию оптического потока для определения движения объектов между кадрами, что позволяет оценить горизонтальное движение и скорость.
6. Изменение Давления : внутри дрона может изменяться давление. Воспользовавшись этим изменением в условиях набора высоты, можно оценить вертикальное движение.
Все эти компоненты работают в согласованном режиме, обеспечивая стабильность, точность и возможность управления квадрокоптером. Их взаимодействие позволяет дрону оценивать свое положение в пространстве и реагировать на изменения в окружающей среде.
Создание компенсатора ошибок
Акселерометр измеряет внешнее ускорение, основанное на гравитации, в трех осях X, Y и Z. Обычно, в отсутствие внешних сил, он показывает нулевые значения. Гироскоп измеряет угловое вращение вокруг этих же осей, предоставляя информацию о вращении в пространстве.
Разница между ними заключается в том, что акселерометр измеряет положение, а гироскоп угловую скорость. Путем дифференциации показаний акселерометра по времени можно получить показания гироскопа, а объединение данных гироскопа и акселерометра даёт более точное представление о положении квадрокоптера.
Важность использования обоих датчиков проявляется в том, что акселерометр обеспечивает стабильные показания в течение длительного времени, в то время как гироскоп предоставляет точные показания за короткое время. Однако гироскоп может смещаться в долгосрочной перспективе, что компенсируется с использованием акселерометра.
Объединение этих двух датчиков с помощью дополнительного фильтра позволяет улучшить точность определения положения квадрокоптера.
ошибка = цель − показания сенсоров
Реализация управляющего контроллера, включающего пропорционально интегральную компенсацию ошибок, позволяет минимизировать погрешности и повысить стабильность полёта.
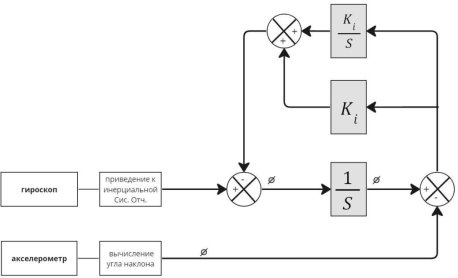
Рис. 8. Схема фильтра, пропорционально-интегральный компенсатор ошибок
Мы получаем необработанные показания от гироскопа и приводим их в инерциальную систему отсчёта. Наша цель — минимизировать погрешность между гироскопом и акселерометром, хотя они измеряют разные параметры. Математические методы позволяют нам получить показания одного датчика на основе данных другого.

Наш подход включает в себя вычисление ошибки за длительный период времени. После применения коррекции, говорим, что у нас есть показания гироскопа, однако, учитывая эту коррекцию, мы вычисляем угловые скорости гироскопа. После интегрирования, мы получаем показания акселерометра, представляющие угол наклона квадрокоптера.
Таким образом, мы постоянно измеряем и корректируем угол наклона квадрокоптера, используя показания гироскопа и акселерометра. Этот процесс позволяет нам компенсировать смещение гироскопа в долгосрочной перспективе и устранять погрешности акселерометра в краткосрочной перспективе.
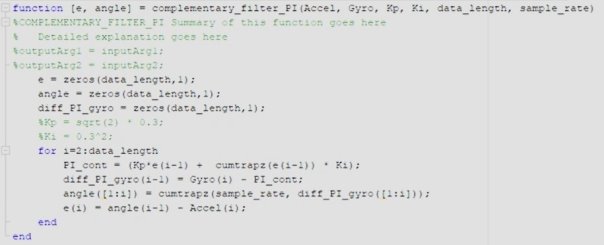
Рис. 9. Код фильтра
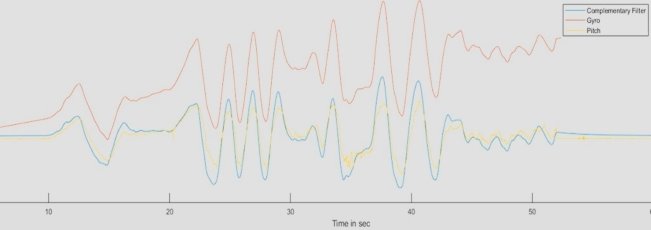
Рис. 10. График по X акселерометра гироскопа и фильтра
Нечеткая логика и нечёткий контроллер
В условиях ограниченной информации и неопределённости входных данных управление беспилотными летательными аппаратами (БПЛА) представляет значительные трудности в формализации задач синтеза регуляторов. Для решения этой проблемы целесообразно применять регуляторы на основе нечеткой логики.
Нечеткие системы возникают из потребности описания стратегий управления на качественном лингвистическом уровне. Построение терм-множеств лингвистических переменных представляет собой важный этап формирования базы знаний (БЗ) для нечетких систем, особенно нечетких регуляторов (НР). Структура терм-множества лингвистической переменной характеризуется числом и типом функции принадлежности, определяющих элементы терм-множества данной переменной.
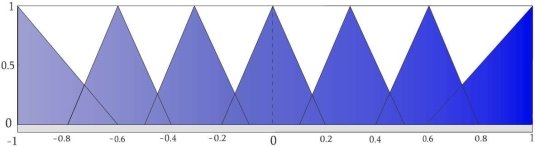
Рис. 11. Лингвистическая переменная
Кратко обозначим преимущества систем с нечеткой логикой по сравнению с альтернативными методами:
1. Обработка нечетких входных данных: Способность оперировать нечёткими входными данными, такими как непрерывно изменяющиеся во времени значения (в случае динамических задач), а также значения, которые невозможно определить однозначно (например, результаты статистических опросов, рекламные компании и т. д.).
2. Формализация критериев оценки и сравнения: Возможность нечеткой формализации критериев оценки и сравнения, включая использование терминов «большинство», «возможно», «преимущественно» и т. д.
3. Проведение качественных оценок: Возможность проведения качественных оценок как входных данных, так и выходных результатов. Это включает в себя оперирование не только значениями данных, но и их степенью достоверности и распределением.

Рис. 12. Нечеткая система управления общего вида
Формирование базы знаний
Формирование БЗ, это ключевой момент создания нечеткого контроллера. Робастность и качество функционирования зависит от базы заложенной внутри контроллера. Обычно этот этап возлагается на эксперта, однако, как и в случае с ПИД-регулятором, процесс формирования базы достаточно трудоёмкий.
В практике создания БЗ для нечетких систем и построения терм-множеств эксперт проводит этап на основе собственного опыта. БЗ может также подбираться интерактивно до достижения оптимальной структуры. Выбор структуры лингвистических переменных косвенно влияет на объем и адекватность получаемой базы продукционных правил.
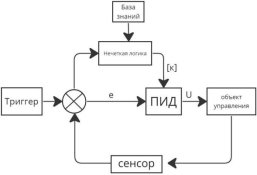
Рис. 13. Нечеткая система управления
Нечеткая логическое управление делится на 5 основных компонентов: определение входных переменных, фаззификацию, нечеткие правила, дефаззификацию, определение выходных переменных.
Определение входных и выходных переменных, лингвистических термов и базы правил является ключевым шагом.
Иногда, применение уравнений движения к определенной траектории может быть неэффективным из-за трудностей выделения невозвращенного движения при значительных отклонениях.
Для преодоления этих трудностей предлагается использовать метод линеаризации с адаптацией уравнений движения в декартовой системе координат.
В области теории управления активно исследуется синтез систем управления при ограниченной информации об объекте и воздействии помех. Одним из методов решения этой проблемы является использование нечетких методов управления в системах автоматического управления.
Принцип работы контроллера, основанного на нечеткой логике, включает в себя формирование входного нечеткого вектора из входных лингвистических переменных. Этот вектор подвергается процедуре фаззификации, где каждой переменной присваивается нечёткое значение на основе функций принадлежности. Нечеткая база знаний контроллера, представленная совокупностью правил, корректируется экспериментально для оптимального согласования с системой.
Контроллер, основанный на нечеткой логике, обеспечивает более гибкий и адаптивный подход к управлению системами при ограниченной информации и воздействии помех.
Также важно осознавать, что динамика системы автоматического управления (САУ) с нечетким контроллером определяется архитектурой нечеткой системы вывода, методологией построения, а также содержанием базы продукционных правил, алгоритмом реализации нечеткого вывода. Следовательно, при проектировании САУ следует тщательно подходить к выбору экспертов, методам и методикам экспертного опроса, а также формированию базы правил.
Заключение
Развитие квадрокоптеров и их разнообразные области применения представляют современным инженерам непрерывные вызовы. Разработка контроллеров, основанных на нечеткой логике, выделяется как перспективное направление. Интеграция таких контроллеров, объединяющих классические методы автоматического управления с технологиями нечетких нейронных сетей, обещает открывать новые возможности. Это направление не только способствует сокращению ошибок в управлении, но и открывает перспективы для новых методов применения беспилотных летательных аппаратов.

