




Данная работа является продолжением работ [1], [2] и [3]. В работе [4] рассматривалось моделирование двухполюсного асинхронного двигателя с числом пазов на полюс и фазу q = 1. В этом случае размерность квадратной матрицы А равна девяти. В данной работе с увеличением числа пазов на полюс и фазу до двух размерность квадратной матрицы А, как будет показано ниже, возрастет до пятнадцати, что существенно расширит требования к инструментарию при программировании. В данной работе будет представлено сравнение характеристик линейного асинхронного двигателя с разомкнутым магнитопроводом, приведенного в работе [3], с круговым асинхронным двигателем. В обоих случаях расчет проводился с помощью магнитных и электрических схем замещения.
В пакете учебных программ по матрицам при подготовке студентов к исследовательской работе данная статья, на наш взгляд, займет важной место.
На рис.1,а показана линейная развертка кругового асинхронного двигателя с одной парой полюсов (2р = 2) и двумя числами пазов на полюс и фазу (q = 2). На рис. 1,б дана его магнитная схема замещения, где токи и потоки на входе двигателя являются соответствующими токами и потоками на его выходе.
Запишем основные уравнения для «n»-ого участка схемы замещения.
Баланс магнитных напряжений магнитной цепи
![]() — контурные магнитные потоки;
— контурные магнитные потоки;
![]() — магнитные сопротивления воздушных участков;
— магнитные сопротивления воздушных участков;
![]() — магнитодвижущая сила, созданная статорным током
— магнитодвижущая сила, созданная статорным током ![]() , протекающим по всем проводникам паза (
, протекающим по всем проводникам паза (![]() );
);
![]() – в шунтирующих зонах;
– в шунтирующих зонах;
![]() — М. Д. С. тока ротора в стержне (
— М. Д. С. тока ротора в стержне (![]() ).
).
Баланс М. Д. С. для «n»-го участка имеет следующий вид:
![]() .
.
Отсюда ток в стержне ротора определится по следующему выражению:
![]() . (1)
. (1)
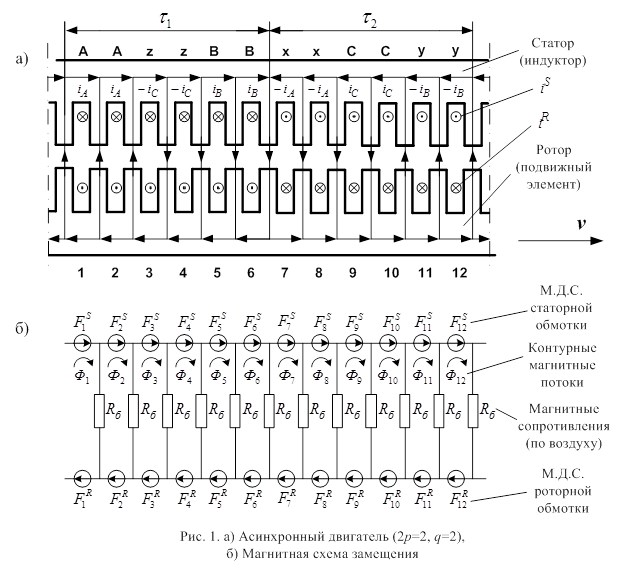
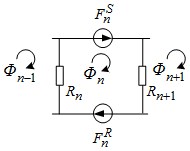
Рис. 2. Магнитная схема замещения
Уравнение баланса напряжений электрической цепи ротора
![]() (2)
(2)
Выразим производные во времени через конечные разности:
![]() ,
,
где n — номер зубцового деления;
k — номер шага разбиения по времени.
В формуле (2) скорость подвижного элемента принимаем равным ![]() и в пределах «k» интервала считается постоянным.
и в пределах «k» интервала считается постоянным.
Производные по пространственной координате «х» выразим через центральные конечные разности:
![]() .
.
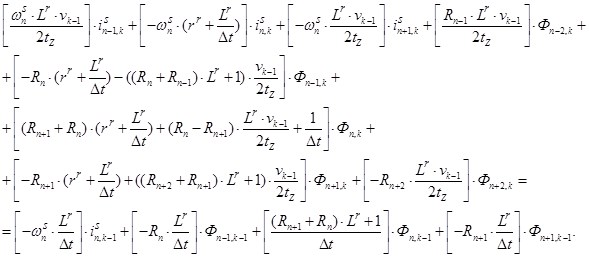
С учетом вышеприведенных замечаний уравнение (2) примет следующий вид:
![]() (3)
(3)
Исключим из уравнения (3) токи в роторе. Для этого подставим выражение (1) в уравнение (3) и получим:
 (4)
(4)
Это уравнение может быть реализовано при произведении матрицы А, элементы которой записаны в квадратных скобках, на матрицу-столбец из потоков (Ф) и токов статорной обмотки. Правая часть уравнения (4) формирует матрицу-столбец S из свободных членов в (k-1) момент времени. Матрица-столбец Х сформирована из первых двенадцати элементов, которые соответствуют потокам, а с 13 по 15 — токам iА, iВ, iС. Общий вид матриц при числе пазов на полюс и фазу q = 2 и числе полюсов 2р = 2 примет следующий вид:
|
Матрица А |
Х |
S |
||||||||||||||||
|
a1,1 |
a1,2 |
a1,3 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
a1,11 |
a1,12 |
a1,13 |
0 |
a1,15 |
× |
x1=Ф1 |
= |
s1 |
|
a2,1 |
a2,2 |
a2,3 |
a2,4 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
a2,12 |
a2,13 |
a2,14 |
0 |
x2=Ф2 |
s2 |
||
|
a3,1 |
a3,2 |
a3,3 |
a3,4 |
a3,5 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
a3,13 |
a3,14 |
0 |
x3=Ф3 |
s3 |
||
|
0 |
a4,2 |
a4,3 |
a4,4 |
a4,5 |
a4,6 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
a4,14 |
a4,15 |
x4=Ф4 |
s4 |
||
|
0 |
0 |
a5,3 |
a5,4 |
a5,5 |
a5,6 |
a5,7 |
0 |
0 |
0 |
0 |
0 |
0 |
a5,14 |
a5,15 |
x5=Ф5 |
s5 |
||
|
0 |
0 |
0 |
a6,4 |
a6,5 |
a6,6 |
a6,7 |
a6,8 |
0 |
0 |
0 |
0 |
a6,13 |
0 |
a6,15 |
x6=Ф6 |
s6 |
||
|
0 |
0 |
0 |
0 |
a7,5 |
a7,6 |
a7,7 |
a7,8 |
a7,9 |
0 |
0 |
0 |
a7,13 |
0 |
a7,15 |
x7=Ф1 |
s7 |
||
|
0 |
0 |
0 |
0 |
0 |
a8,6 |
a8,7 |
a8,8 |
a8,9 |
a8,10 |
0 |
0 |
a8,13 |
a8,14 |
0 |
x8=Ф2 |
s8 |
||
|
0 |
0 |
0 |
0 |
0 |
0 |
a9,7 |
a9,8 |
a9,9 |
a9,10 |
a9,11 |
0 |
a9,13 |
a9,14 |
0 |
x9=Ф3 |
s9 |
||
|
0 |
0 |
0 |
0 |
0 |
0 |
0 |
a10,8 |
a10,9 |
a10,10 |
a10,11 |
a10,12 |
0 |
a10,14 |
a10,15 |
x10=Ф4 |
s10 |
||
|
a11,1 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
a11,9 |
a11,10 |
a11,12 |
a11,13 |
0 |
a11,14 |
a11,15 |
x11=Ф5 |
s11 |
||
|
a12,1 |
a12,2 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
a12,10 |
a12,11 |
a12,12 |
a12,13 |
0 |
a12,15 |
x12=Ф6 |
s12 |
||
|
a13,1 |
a13,2 |
0 |
0 |
a13,5 |
a13,6 |
a13,7 |
a13,8 |
0 |
0 |
a13,11 |
a13,12 |
a13,13 |
0 |
a13,15 |
x13=iA |
s13 |
||
|
0 |
0 |
a14,3 |
a14,4 |
a14,5 |
a14,6 |
0 |
0 |
a14,9 |
a14,10 |
a14,11 |
a14,12 |
0 |
a14,14 |
a14,15 |
x14=iC |
s14 |
||
|
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
1 |
1 |
1 |
x15=iB |
s15 |
||
Так как в асинхронном двигателе сопротивления на всех зубцовых делениях одинаковы Rn=Rб, то уравнение (4) примет следующий вид:
 (5)
(5)
Введем следующие обозначения:
- Элементы матрицы А, перемножаемые на потоки матрицы-столбца Х:
- Элементы матрицы А, перемножаемые на токи ia, ib, ic матрицы Х:
![]()
- Элементы матрицы-столбца свободных членов S:
С учетом обозначений уравнение (5) примет следующий вид:
 (6)
(6)
Уравнение (6) позволит определить для первых двенадцати строк элементы матрицы А и с первой по двенадцатый элементы матрицы-столбца S, для этого последовательно зададимся n:
n = 1.

Запишем элементы матрицы А:
a1,1=B; a1,2=C; a1,3=D; a1,11=-D; a1,12=E; a1,13=М; a1,15=T.
В правой части сформирован элемент s1 матрицы-столбца S:
![]() .
.
Примечание: Условно в начале обмотки принимаем знак «+», а в конце — «–», поэтому в элементе a1,15 появилось умножение на (-1) в соответствии с рис.1,а.
n = 2.

Отсюда элементы матрицы А:
a2,1=E; a2,2=B; a2,3=C; a2,4=D; a2,12=-D; a2,13=N; a2,14=T• (-1).
Второй элемент s2 матрицы-столбца S:
![]() .
.
Аналогично, задаваясь n от 3 до 12 получим:
a3,3= a4,4= a5,5= a6,6=a7,7= a8,8= a9,9= a10,10=a11,11= a12,12=B;
a3,4= a4,5= a5,6= a6,7=a7,8= a8,9= a9,10= a10,11=a11,12= a12,1=С;
a3,5= a4,6= a5,7= a6,8=a7,9= a8,10= a9,11= a10,12=a11,1= a12,2=D;
a3,2= a4,3= a5,4= a6,5=a7,6= a8,7= a9,8= a10,9=a11,10= a12,11= a1,12=E;
a3,1= a4,2= a5,3= a6,4=a7,5= a8,6= a9,7= a10,8=a11,9= a12,10= a1,11= a2,12=-D;
a3,13= a6,13= a7,15= a10,15=a11,14=-T;
a3,14= a7,13= a11,15=-M;
a4,14= a6,15= a10,14=N;
a5,14=a8,14= a9,13=a12,13=a4,15=T;
a1,13=a5,15=a9,14=M.
Элементы матрицы-столбца свободных членов S:
![]() ;
;
![]() ;
;
![]() ;
;
![]() ;
;
![]() ;
;
![]() ;
;
![]() ;
;
![]() ;
;
![]() ;
;
![]() .
.
Элементы 13 и 14 строк матрицы А и элементы s13 и s14 матрицы-столбца S формируются из баланса напряжения электрической цепи статорной обмотки. Если обмотка индуктора питается от трехфазного напряжения с соединением в «звезду» без нулевого провода, то
 (7)
(7)
где ![]()
![]()
![]()
С учетом шага по времени Δt в k-ый момент времени:
Уравнения (7) при выражении производных по времени через конечные разности примут следующий вид:
где ![]()
Обозначим rs+Ls/Δt=KS, тогда
a13,1= a13,2= a13,11= a13,12=U;
a13,5= a13,6= a13,7= a13,8=-U;
a13,13=KS;
a13,15=-KS;
Правая часть определяет свободный член s13 матрицы-столбца S:

Аналогично, для второго уравнения (7) определим элементы 14 строки матрицы А и элемент s14 матрицы-столбца S:
Тогда:
a14,3= a14,4= a14,5= a14,6=U;
a14,9= a14,10= a14,11= a14,12=-U;
a14,14= -KS;
a14,15=KS;
Правая часть определяет свободный член s14 матрицы-столбца S:
 .
.
Наконец, сумма токов определяет элементы пятнадцатой строки матрицы А и элемент s15 матрицы-столбца S.
![]()
Окончательно, матрица А примет следующий вид, удобный для программирования в MatLab:
|
А= |
B |
C |
D |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
-D |
E |
M |
0 |
T |
|
E |
B |
C |
D |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
-D |
N |
-T |
0 |
|
|
-D |
E |
B |
C |
D |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
-T |
-M |
0 |
|
|
0 |
-D |
E |
B |
C |
D |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
-N |
T |
|
|
0 |
0 |
-D |
E |
B |
C |
D |
0 |
0 |
0 |
0 |
0 |
0 |
T |
M |
|
|
0 |
0 |
0 |
-D |
E |
B |
C |
D |
0 |
0 |
0 |
0 |
-T |
0 |
N |
|
|
0 |
0 |
0 |
0 |
-D |
E |
B |
C |
D |
0 |
0 |
0 |
-M |
0 |
-T |
|
|
0 |
0 |
0 |
0 |
0 |
-D |
E |
B |
C |
D |
0 |
0 |
-N |
T |
0 |
|
|
0 |
0 |
0 |
0 |
0 |
0 |
-D |
E |
B |
C |
D |
0 |
T |
M |
0 |
|
|
0 |
0 |
0 |
0 |
0 |
0 |
0 |
-D |
E |
B |
C |
D |
0 |
N |
-T |
|
|
D |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
-D |
E |
B |
C |
0 |
-T |
-M |
|
|
C |
D |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
-D |
E |
B |
T |
0 |
-N |
|
|
U |
U |
0 |
0 |
-U |
-U |
-U |
-U |
0 |
0 |
U |
U |
KS |
0 |
-KS |
|
|
0 |
0 |
U |
U |
U |
U |
0 |
0 |
-U |
-U |
-U |
-U |
0 |
-KS |
KS |
|
|
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
1 |
1 |
1 |
Неизвестные переменные (потоки и токи в статорной обмотке) в k-ый момент времени определяется в результате следующей операции с матрицами:
X=A-1•S,
Далее, подставляя в уравнение (1) n = 1… 12, определяем токи в роторе:
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
Электромагнитные усилия на зубцовом делении определяются по следующим формулам:
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
Суммарное усилие: ![]()
Скорость в k-ый момент времени: ![]()
Произведем построение математической модели асинхронного двигателя методом Гаусса-Жордана с использованием языка программирования MatLab. Ниже приведен пример кода:
function AD_q_2
% Начальные условия
Rb=0.1003*10^7;
rs=19;
Ls=0.074;
rr=9.269*10^-5;
Lr=0.00372*10^-5;
dt=0.001;
tz=9.769*10^-3;
m=1.9;
v0=0;
wn=200;
f=50;
w=2*pi*f;
U=wn/dt;
Um=310;
X=zeros(15,1);
F=0;
K=input('длительность цикла k=');
for k=1:(K+1)
v(1,k)=v0; % Создание вектор-строки для графика скорости
f(1,k)=sum(F); % Создание вектор-строки для графика усилия
Uab=Um*cos(w*(k-1)*dt+2*pi/3);
Ubc=Um*cos(w*(k-1)*dt);
% Заполнение матрицы А
A=zeros(15);
B=2*Rb*(rr+Lr/dt)+1/dt;
C=-Rb*(rr+Lr/dt)+(2*Rb*Lr+1)*v0/(2*tz);
D=-Rb*Lr*v0/(2*tz);
E=-Rb*(rr+Lr)-(2*Rb*Lr+1)*v0/(2*tz);
T=-wn*Lr*v0/(2*tz);
F1=-wn*(rr+Lr/dt);
M=F1+T;
N=-T+F1;
KS=rs+Ls/dt;
W=-wn*Lr/dt;
P=-Rb*Lr/dt;
Q=(2*Rb*Lr+1)/dt;
% Заполнение матрицы сопротивлений
for n=1:12
A(n,n)=B;
end;
for n=1:11
A(n,n+1)=C;
A(n+1,n)=E;
end;
for n=1:10
A(n,n+2)=D;
A(n+2,n)=-D;
end;
for n=1:2
A(n,n+10)=-D;
A(n+10,n)=D;
end;
A(1,12)=E;
A(12,1)=C;
% Заполнение столбцов 13,14 и 15 матрицы А
for n=1:2
A(4-n,n+12)=-T;
A(6-n,n+13)=T;
A(10-n,n+12)=T;
A(12-n,n+13)=-T;
A(n,13)=(2-n)*M+(n-1)*N;
A(n+2,14)=(n-2)*M+(1-n)*N;
A(n+4,15)=(2-n)*M+(n-1)*N;
A(n+5,13)=(n-2)*T+(1-n)*M;
A(n+8,14)=(2-n)*M+(n-1)*N;
A(n+10,15)=(n-2)*M+(1-n)*N;
end;
A(1,15)=T;
A(7,15)=-T;
A(8,13)=-N;
A(12,13)=T;
for n=1:2
A(12+n,12+n)=((-1)^(n+1))*KS;
A(12+n,15)=((-1)^n)*KS;
end;
for n=1:3
A(15,n+12)=1
end;
% Заполнение строк 13 и 14 матрицы А
for n=1:4
A(13,n+4)=-U;
A(14,n+2)=U;
A(14,n+8)=-U;
end;
for n=1:2
A(13,n)=U;
A(13,n+10)=U;
end;
% Матрица свободных членов
S=[W*X(13)+P*(X(12)+X(2))+Q*X(1);
W*X(13)+P*(X(1)+X(3))+Q*X(2);
W*(-1)*X(14)+P*(X(2)+X(4))+Q*X(3);
W*(-1)*X(14)+P*(X(3)+X(5))+Q*X(4);
W*X(15)+P*(X(4)+X(6))+Q*X(5);
W*X(15)+P*(X(5)+X(7))+Q*X(6);
W*(-1)*X(13)+P*(X(6)+X(8))+Q*X(7);
W*(-1)*X(13)+P*(X(7)+X(9))+Q*X(8);
W*X(14)+P*(X(8)+X(10))+Q*X(9);
W*X(14)+P*(X(9)+X(11))+Q*X(10);
W*(-1)*X(15)+P*(X(10)+X(12))+Q*X(11);
W*(-1)*X(15)+P*(X(11)+X(1))+Q*X(12);
(X(1)+X(2)-X(5)-X(6)-X(7)-X(8)+X(11)+X(12))*U+(Ls/dt)*(X(13)-X(15))+Uab;
(X(5)+X(6)-X(11)-X(12)-X(9)-X(10)+X(3)+X(4))*U+(Ls/dt)*(X(15)-X(14))+Ubc;
0];
% Решение методом Гаусса-Жордана
Z=rref([A S]);
X=Z(1:15,16:16);
% Матрица токов ротора
Ir=[-wn*X(13)-Rb*X(12)+2*Rb*X(1)-Rb*X(2);
-wn*X(13)-Rb*X(1)+2*Rb*X(2)-Rb*X(3);
-wn*(-1)*X(14)-Rb*X(2)+2*Rb*X(3)-Rb*X(4);
-wn*(-1)*X(14)-Rb*X(3)+2*Rb*X(4)-Rb*X(5);
-wn*X(15)-Rb*X(4)+2*Rb*X(5)-Rb*X(6);
-wn*X(15)-Rb*X(5)+2*Rb*X(6)-Rb*X(7);
-wn*(-1)*X(13)-Rb*X(6)+2*Rb*X(7)-Rb*X(8);
-wn*(-1)*X(13)-Rb*X(7)+2*Rb*X(8)-Rb*X(9);
-wn*X(14)-Rb*X(8)+2*Rb*X(9)-Rb*X(10);
-wn*X(14)-Rb*X(9)+2*Rb*X(10)-Rb*X(11);
-wn*(-1)*X(15)-Rb*X(10)+2*Rb*X(11)-Rb*X(12);
-wn*(-1)*X(15)-Rb*X(11)+2*Rb*X(12)-Rb*X(1)];
% Электромагнитное усилие
F=[(X(2)-X(12))*Ir(1)/(2*tz);
(X(3)-X(1))*Ir(2)/(2*tz);
(X(4)-X(2))*Ir(3)/(2*tz);
(X(5)-X(3))*Ir(4)/(2*tz);
(X(6)-X(4))*Ir(5)/(2*tz);
(X(7)-X(5))*Ir(6)/(2*tz);
(X(8)-X(6))*Ir(7)/(2*tz);
(X(9)-X(7))*Ir(8)/(2*tz);
(X(10)-X(8))*Ir(9)/(2*tz);
(X(11)-X(9))*Ir(10)/(2*tz);
(X(12)-X(10))*Ir(11)/(2*tz);
(X(1)-X(11))*Ir(12)/(2*tz)];
% Скорость
v0=v0+(sum(F)/m)*dt;
end;
% Построение графиков
k=0:(K);
subplot(2,1,1);
plot(k*dt,v);title('Скорость');
xlabel('t, c');
ylabel('v, м/c');
grid on
subplot(2,1,2);
plot(k*dt,f);
title('Электромагнитное усилие');
xlabel('t, c');
ylabel('F, H');
grid on
end
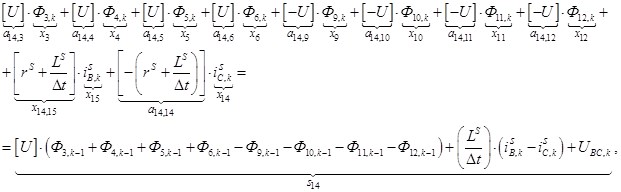
Результаты моделирования представлены в таблице 1, а также на рис.3 и 4.
Таблица 1
Результаты расчета
|
k = 1 |
k = 2 |
||||||||
|
X |
S |
irn,k |
Fn,k |
X |
S |
irn,k |
Fn,k |
||
|
Ф1 |
-1,74E-05 |
-0,001 |
147,78 |
0,57 |
Ф1 |
-4,88E-05 |
-0,011 |
323,19 |
1,88 |
|
Ф2 |
-2,91E-06 |
0,002 |
44,55 |
0,19 |
Ф2 |
-2,16E-05 |
-0,001 |
171,12 |
1,28 |
|
Ф3 |
6,81E-05 |
0,022 |
-347,01 |
-1,39 |
Ф3 |
9,77E-05 |
0,055 |
-321,33 |
-2,22 |
|
Ф4 |
7,54E-05 |
0,024 |
-413,91 |
-0,36 |
Ф4 |
0,000113 |
0,06 |
-442,01 |
-1,1 |
|
Ф5 |
8,55E-05 |
0,024 |
-494,79 |
-0,07 |
Ф5 |
0,000146 |
0,067 |
-644,53 |
-0,71 |
|
Ф6 |
7,83E-05 |
0,021 |
-458,47 |
1,59 |
Ф6 |
0,000135 |
0,061 |
-613,13 |
3,06 |
|
Ф7 |
1,74E-05 |
0,001 |
-147,78 |
0,57 |
Ф7 |
4,88E-05 |
0,011 |
-323,19 |
1,88 |
|
Ф8 |
2,91E-05 |
-0,002 |
-44,55 |
0,19 |
Ф8 |
2,16E-05 |
0,001 |
-171,12 |
1,28 |
|
Ф9 |
-6.81E-05 |
-0,02 |
347,01 |
-1,39 |
Ф9 |
-9,77E-05 |
-0,05 |
321,33 |
-2,22 |
|
Ф10 |
-7.54E05 |
-0,02 |
413,91 |
-0,36 |
Ф10 |
-0,00011 |
-0,06 |
442,01 |
-1,105 |
|
Ф11 |
-8.55E-05 |
-0,02 |
494,79 |
-0,07 |
Ф11 |
-0,00014 |
-0,06 |
644,53 |
-0,71 |
|
Ф12 |
-7.83E-05 |
-0,02 |
458,47 |
1,59 |
Ф12 |
-0,0001 |
-0,06 |
613,13 |
3,06 |
|
Ia |
-0,51 |
-358,98 |
FΣk |
0,064 |
Ia |
-1,31 |
-583,89 |
FΣk |
1,061 |
|
Ic |
-2,05 |
552,29 |
Ic |
-2,12 |
715,37 |
||||
|
Ib |
2,56 |
0 |
Ib |
3,44 |
0 |
||||
Рис. 3. Результат моделирования асинхронного двигателя в режиме прямого пуска
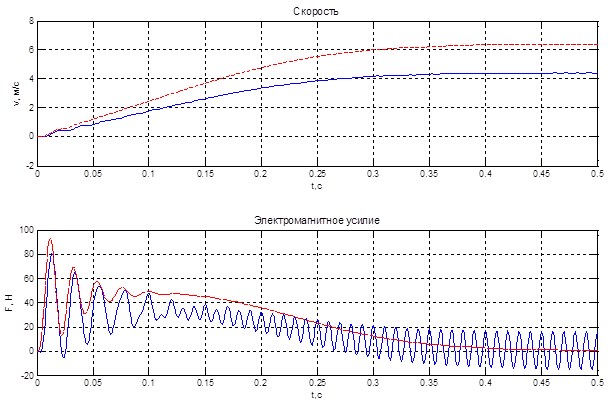
Рис. 4. Сравнение характеристик F(t) и v(t) линейного (--) и кругового (- - -)
асинхронных двигателей для 2р = 2 и q = 2
Как и следовало ожидать, в линейном асинхронном двигателе (рис.4) с увеличением скорости возрастают тормозные усилия от взаимодействия токов в подвижном элементе с неподвижным в пространстве и пульсирующим во времени потоками индуктора, возникающими вследствие разомкнутости магнитопровода. Это, в свою очередь, приводит к снижению скорости подвижного элемента (ротора), как это и было отмечено в [1].
Литература:
1. Сарапулов Ф. Н., Емельянов А. А., Иваницкий С. В., Резин М. Г. Исследование электромеханических переходных процессов линейного асинхронного короткозамкнутого двигателя // Электричество. — 1982. — № 10. — С. 54–57.
2. Емельянов А. А., Богатов Е. А., Клишин А. В., Медведев А. В., Симонович В. Г. Математическая модель линейного асинхронного двигателя на основе магнитных схем замещения // Молодой ученый. — 2010. — № 5. — С.14–22.
3. Емельянов А. А., Медведев А. В., Богатов Е. А., Кобзев А. В., Бочкарев Ю. П. Программирование линейного асинхронного двигателя в MATLAB // Молодой ученый. — 2013. — № 3. — С. 129–143.
4. Емельянов А. А., Медведев А. В., Кобзев А. В., Бочкарев Ю. П., Евдокимов О. В. Моделирование асинхронного двигателя с помощью магнитных и электрических схем замещения // Молодой ученый. — 2013. — № 4. — С. 1–10.
5. Ануфриев И. Е. и др. MATLAB 7 / Ануфриев И. Е., Смирнов А. Б., Смирнова Е. Н. — СПб.: БХВ-Петербург, 2005. — 1104 с.
