В статье авторы исследуют принцип действия, назначение различных систем автоведения поездов в России.
Ключевые слова: метро, автоведение, железные дороги.
Автоматизированная система управления движением поездов метрополитена (АСУ ДПМ) предназначена для автоматизации управления движением поездов, включая пуск, разгон, выбор режима ведения поезда на перегонах, подтормаживание, а также прицельное торможение у платформ. Система автоведения позволяет совершенствовать управление перевозочным процессом, а именно:
— повышение точности выполнения графика движения поездов,
— более рациональное использование пропускной способности линий и участков метрополитена,
— снижение расход электроэнергии,
— облегчение труда машиниста,
— повышение оперативности и объёма информации о движении поездов
Стоит отметить, что при ручном управлении поездом, точность выполнения графика довольно низка, так как машинист опирается только на расписание, где указано время прохождения каждой станции. Соответственно по перегону машинист движется произвольно, ориентируясь на сигналы автоблокировки, личные часы и время прибытия и отправления со станции. При этом, по различным причинам, порой не зависящим от машиниста, возможен сбой графика движения поездов.
В свою очередь, система автоведения, имея зависимость времени хода поезда от пути по контрольным участкам, позволяет выполнять график движения с заданной точностью. В качестве контрольных участков могут использоваться блок-участки, станции и т. д.
Исследования, проведенные инженерами ВНИИЖТ [3], показали, что точность выполнения графика движения на метрополитене при ручном управлении составляет порядка 11–12 с в час «пик», когда системы автоведения позволяют достичь точность выполнения графика на уровне ± 2,5 с.
Еще одним, немаловажным параметром эффективности АСУ ДПМ является экономия электроэнергии. Благодаря системам автоведения, удается сократить расход электроэнергии на 1–2 % вследствие применения оптимальных программ движения поезда.
Обеспечение безопасности движения. При внедрении автоведения на метрополитенах машинист освобождается от многих функций непосредственного управления ведением поезда, что позволяет машинисту взять на себя обязанности помощника, т. е. перейти на ведение поезда одним лицом. Это уже осуществлено на ряде линий метрополитенов, где внедрена комплексная система автоматического управления движением поездов, состоящая из подсистем автоведения поездов и безопасности движения (АРС). Кроме того, системы автоведения, выдерживая точно график движения, уменьшают вероятность сближения поездов на величину, меньшую принятого интервала движения.
Основными структурными элементами АСУ ДПМ являются:
— Центральный пост управления (ЦПУ)
— Станционное устройство (СУ)
— Поездное устройство (ПУ)
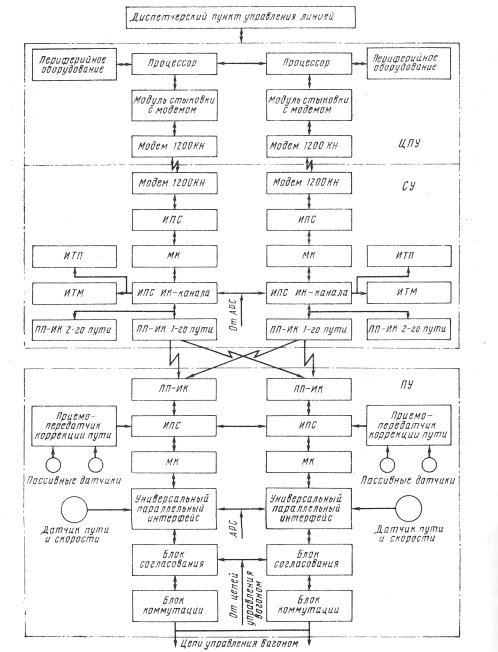
Рис. 1
Рассмотрим каждый из этих элементов по-отдельности.
Центральный пост управления системы автоведения поездов управляет всеми поездами на линии путем выработки времен стоянки и времен хода по перегонам на основе заданного графика. ЦПУ построен на базе управляющего вычислительного комплекса (УВК). Обмен информацией между станционными устройствами и УВК осуществляется по кабельным линиям связи через модемы. Для повышения надежности системы линии связи резервируют.
Станционные устройства размещают на каждой станции. СУ выполняют функции обмена информацией между ЦПУ и поездом. Кроме того, СУ управляет информационными табло на станции. СУ состоит из двух идентичных полукомплектов. Основным узлом СУ является микроконтроллер МК. Связь с ЦПУ осуществляется через интерфейс последовательного обмена (ИПС) и модем, а связь с поездом осуществляется через ИПС и инфракрасный канал связи.
Поездное устройство управляет движением поезда на линии с учетом информации, полученной от ЦПУ через СУ, а также от устройств АРС. ПУ установлены в каждом головном вагоне поезда и состоят из двух полукомплектов, работающих параллельно. В основе каждого полукомплекта лежит микроконтроллер МК, осуществляющий управление всеми элементами поездного устройства. Поездное устройство допускает вмешательство в процессе управления машиниста. В том случае, когда команды ПУ и машиниста различаются, буде выполняться та команда, которая соответствует более безопасному режиму. Высший приоритет имеет сигнал, поступающий от устройств обеспечения безопасности.
Системы автоведения поездов в Москве.
1961 год. В Московском метрополитене впервые в мире испытана система автоматического ведения поездов (САУ-М). Испытания проходили на Кольцевой линии.
1968 год. На Калужской линии начата опытная эксплуатация системы автономного ведения поездов. Надёжность системы значительно повысилась. Для регулирования движения поездов использовалась автоматическая блокировка.
1979 год. На Ждановско-Краснопресненской линии была внедрена комплексная система автоматического управления движением поездов (КСАУП). Это централизованная трёхуровневая система, включающая в себя центральный пост управления, станционные и поездные устройства. Система безопасности — АЛС-АРС.
1990–1992 годы. Планировалось внедрение единой системы управления метрополитеном (ЕСУМ), в которой все вопросы управления пассажиропотоками рассматривались в комплексе. Система была спроектирована на сверхбольших интегральных схемах и обладала очень высокой надёжностью. ЕСУМ использовала датчики падения пассажиров и крупногабаритных предметов на пути и датчики несанкционированного прохода людей в тоннель; для обеспечения надёжности все датчики были продублированы. Основными носителями этой системы должны были стать вагоны «Яуза», но также была запланирована и модернизация вагонов 81–717/714. Система была доведена до стадии начала внедрения, но распад СССР и тяжелейшие экономические условия последующего периода перечеркнули эти планы.
Применение систем АСУ ДПМ в Петербургском метрополитене.
На пяти линиях Петербургского метрополитена используются различные системы автоведения поездов метрополитена, в частности:
— На первой линии эксплуатируется комплексная система автоматического управления поездами метрополитена КСАУП М. Движение поездов регулируется программным обеспечением центрального поста автоведения согласно заданному графику.
— На второй линии используется аппаратура комплексной системы «Движение», работающая без привязки к ЦПУ.
— На четвертой линии реализована наиболее современная версия автоведения, основанная на системе бесконтактной привязки к пути (СБПП).
— На пятой линии установлена следующая версия поездной аппаратуры ПА КСД, установленной на второй линии.
Системы автоведения в мире.
Первой в мире системой автоведения из когда-либо и где-либо введённой на линиях метрополитена является САУПМ (система автоматического управления поездами метрополитена), появившаяся в 1967 году на линии Виктория в Лондоне.
Метрополитен Дубая является рекордсменом Книги Рекордов Гиннеса как крупнейшее беспилотное метро планеты. В данный момент метро состоит из двух линий: красной и зеленой. Обе запущены 9 сентября, но с разницей в 2 года — в 2009 и 2011 годах соответственно.
Литература:
- Микропроцессорные системы автоведения электроподвижного состава / Л. А. Баранов, Я. М. Головичер, Е. В Ерофеев, В. М. Максимов; Под ред. Л. А. Баранова. — М.: Транспорт, 1990. — 272 с.
- Анашкин Б. Т., Кравицкий К. А. Устройство автоматического управления поездами метрополитена // Трансп. стр-во. 1968. № 6. С. 24–26.
- Астрахан В. И., Фаминская Е. Г. Регулирование времени хода поездов метрополитена с помощью микроЭВМ // Тр. ВНИИЖТ. 1981. Вып. 643. С. 17–22.
- Гуськов М. В., Бужеря В. И. Интервальный алгоритм управления движением поездов метрополитена в системе автоведения с управляющей ЭВМ // Тр. МИИТ (межвузовский сб.). 1978. Вып. 612. С. 107–114.

