В статье изложено исследование проблемы процесса движения автопоезда задним ходом в ограниченном пространстве. Проведен Customer Development. Исследуя рынок услуг, было представлено возможное решение. Ведется разработка математической модели движения автопоезда.
Ключевые слова: парктроник, система парковки, автопоезд, автоматическая система, автопилот.
Автопоезд — это крупногабаритное транспортное средство, требующее предельной осторожности и концентрации внимания при вождении.
Проведя Customer development было выявлено, что выполнение маневра задним ходом довольно сложный процесс, который требует владения соответствующими профессиональными навыками и компетенциями на очень высоком уровне не только у водителей новичков, но и очень опытных водителей.
Растет количество автопоездов участвующих в транспортировке грузов. Квалификация водителей не повышается (даже снижается). Система автоматической парковки автопоезда позволит автоматизировать процесс движения автопоезда задним ходом при постановке под погрузку/разгрузку (маневрировании автопоезда в условиях ограниченного пространства, что существенно снизит время на выполнение данных маневров и повысит безопасность движения. В настоящее время имеется задел в виде структурной схемы автоматической парковки автопоезда и программы расчета кинематики движения автопоезда. В дальнейшем требуется разработка алгоритма управления системой автоматической парковки, выбор компонентной базы и апробация работы системы на макете.
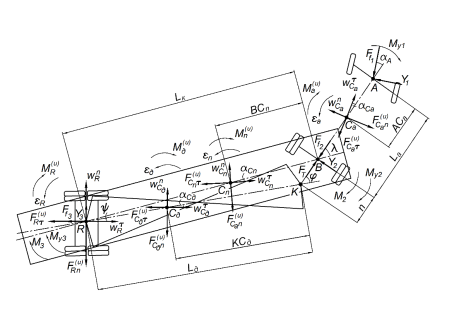
Рис. 1. Математическая модель автопоезда
Научная новизна предлагаемых в проекте решений объясняется разработкой структурной схемы и алгоритма управления системой автоматической парковки автопоезда. Систему планируется предлагать в виде дополнительной опции (Помощник при парковке) или же внедрять систему в автопилот автомобиля. Данного продукта нет на рынке услуг. На данный момент ведутся разработки автопилота для автомобиля “KAMAZ”, так же немецкая фирма «ZF» демонстрировала на выставке IAA опытный образец автопоезда с системой автоматической парковки. Другой информации не имеется.

Рис. 2. Почему нужна данная разработка?
В ходе исследований и разработки системы автоматической парковки требует выполнения следующих задач:
– Разработка принципиальной схемы системы автоматической парковки;
– Разработка математической модели автопоезда (рис.1) и алгоритма управления системой;
– Выбор и приобретение датчиков для системы автоматической парковки;
– Разработка и изготовление макета автопоезда;
– Проведение макетных испытаний системы автоматической парковки автопоезда;
– Оптимизация алгоритма работы и параметров системы управления.
Для решения поставленных задач были подобраны оптимальные датчики, такие как лазерный дальномер, датчик складывания и т. п.
Используя программы для расчетов, создается математическая модель, по которой, впоследствии, будет запрограммирован контроллер.
Время парковки автопоезда может быть сокращено в 2 раза при этом увеличивается безопасность движения в ограниченных условиях движения. Снижается время простоев автопоезда. Снижаются требования к квалификации водителя.
Аналоги в серийном производстве отсутствуют.
В сопоставлении с аналогами стоит отметить разработку новых алгоритмов, которые позволят минимизировать или удалить следующие несрабатывания датчиков:
Острые предметы;
Предметы, поглощающие ультразвуковое излучение (одежда, пористые материалы, снег);
Небольшие предметы (менее 1 метра);
Объекты, отражающие звук в сторону от датчиков;
Система не может обнаружить провалы в асфальте, открытые колодцы, разбросанные мелкие острые предметы и прочие опасные объекты, находящиеся вне поля зрения датчиков.
Это позволит привлечь большее количество потребителей и производителей в т. ч.

Рис. 3. Мануал по установке датчиков
На данном этапе развития проекта имеются компании, которые позволят проводить разработки и исследования с использованием своих производственных мощностей.
Ведется разработка 3D моделей испытательного стенда.
Рассматривая статистику, предполагается, что разработка будет актуальна для отечественных автомобилей включительно, т. к. по данным аналитического агентства «Автостат» и статистике ДТП с сайта stat.gibdd.ru/ видно, что 4 из 5 позиций заняты автомобилями Российского производства.
Также разработка решает проблему порчи имущества при выполнении маневра задним ходом.
Система автоматической парковки так же позволит снизить количество ДТП, ввиду помощи водителю, путем использования соответствующих датчиков и камер на автопоезде. Это позволит обеспечить видимость слепых зон и покажет нужный угол при выполнении маневра задним ходом.
Рассматривается вариант использования «Помощника» в автошколах для обучения водителей соответствующей категории, т. к. значительно упрощается процесс парковки и вообще заднего хода в целом, что положительно скажется на результатах.
Данный проект выиграл грант в программе «УМНИК» и нуждается в дальнейшей разработке и выходе на рынок.
В перспективе сотрудничество с крупными грузоперевозчиками.

Рис. 4. Результат
Литература:
- Официальный сайт «Автостат» [Электронный ресурс]. URL: https://www.autostat.ru/news/
- Официальный сайт статистики ДТП ГИБДД [Электронный ресурс]. URL: stat.gibdd.ru/

