Статья посвящена анализу работы повышения помехозащищенности передаваемого сообщения телеметрической системы при бурении нефтяных и газовых скважин.
Ключевые слова: помехозащищенность, телеметрическая система.
Одним из вариантов повышения защиты передаваемых с забоя данных от воздействия случайных помех в гидроканале является помехоустойчивое кодирование информации [1]. Необходимо применять код передачи, позволяющий не только обнаруживать, но и по возможности исправлять ошибки, возникающие при передаче дискретного сообщения с забоя. При этом возникает избыточность в передаваемой информации, а поскольку передача сообщения осуществляется на достаточно низких частотах, необходимо оценить увеличение времени поступления данных с забоя при использовании помехозащищенного кода. За исключением частоты вращения двигателя и осевой нагрузки, остальные параметры, измеряемые на забое, можно считать меняющимися относительно медленно, по сравнению с частотой опроса датчиков, вследствие этого наибольший интерес представляет информация, содержащаяся в четырех младших разрядах передаваемого параметра. Для значений азимута и угла установки отклонителя четыре младших разряда содержат информацию о максимальном изменении угла на 7.5 градусов, что вполне достаточно для вычисления текущего значения. Таким образом, для повышения надежности передачи значений параметров, имеющих относительно медленную скорость изменения, можно кодировать четыре младших разряда, а старшие передавать в неизмененном виде. При этом периодически (например, один цикл из пяти) необходимо передавать в кодированном виде полное значение параметра для контроля текущего значения и предотвращения накопления ошибки. Возникновение ошибок при передаче данных с забоя возможно вследствие воздействия на сигнал случайной помехи, вызванной изменением момента на долоте. Данная помеха имеет Гауссов закон распределения, при этом ошибки, возникающие в передаваемых кодовых словах, можно считать независимыми. При таких условиях использование помехозащищенного кода, позволяющего исправлять однократные ошибки, оказывается достаточно эффективным [2].
Для кодирования параметров, имеющих относительно медленную скорость изменения, будем использовать линейный блочный код Хемминга. Использование данного кода позволяет обнаруживать ошибки кратности <2 и исправлять все однократные ошибки. При передаче информации о значении частоты вращения вала забойного двигателя и нагрузке на долото возможно использование проверки передаваемого кода на четность. В конце передачи и приема каждого параметра производится передача контрольной суммы. Число бит в слове, передаваемом с забоя на поверхность, должно быть четным. Если значение параметра выражается нечетным числом бит, то добавляется лишний бит в контрольном разряде. Компьютер палубного модуля управления проверяет слово на четность. Если принятое наверху число бит нечетно, то значение параметра считается ложным и отбрасывается, при этом исправление возникшей ошибки невозможно. Применение кодирования с проверкой на четность приведет к увеличению на две единицы количества разрядов для передачи каждого из параметров.
Оценивая общее время, необходимое для передачи блока данных с забоя на поверхность, можно отметить, что использование кода Хемминга при кодировании младших разрядов отдельных параметров приводит к увеличению времени передачи на 21–25 %, по сравнению с передачей сообщения без применения кодирования, и на 4–5 %, по сравнению с вариантом использования проверки на четность для всех значений.
На основании изложенного выше можно систематизировать режимы работы телесистемы в зависимости от вида бурения, длительность такта передачи, кодирования, организации циклов опроса измерительных каналов, а также рекомендуемой дальности связи. Характеристики режимов для предложенного набора передаваемых значений приведены в таблице 1.
Таблица 1
Характеристики режимов работы телесистемы
|
Режим |
Такт |
Параметр |
Цикл |
Скорость передачи |
Дальность связи | ||||||
|
Номер канала | |||||||||||
|
1 |
2 |
3 |
4 |
5 |
6 |
7 | |||||
|
Бурение с отклонителем | |||||||||||
|
P1–1 |
0.5–2 |
A |
Z |
F |
T |
G |
A |
F |
49–196 |
2–0.5 |
До 4000 |
|
P1–1 |
2.5–4 |
A |
Z |
F |
T |
G |
A |
F |
245–392 |
0.4–0.2 |
Св. 4000 |
|
Бурение без отклонителя | |||||||||||
|
P2–2 |
0.5–2 |
A |
Z |
P |
N |
T |
G |
Ti |
40–158 |
2–0.5 |
До 4000 |
|
P2–2 |
2.5–4 |
A |
Z |
P |
N |
T |
G |
Ti |
198–316 |
0.4–0.25 |
Св. 4000 |
Общая структура сообщения, передаваемого с забоя, с учетом последовательности, генерируемой при начале сеанса работы телесистемы, будет иметь вид, показанный на Рис. 1.
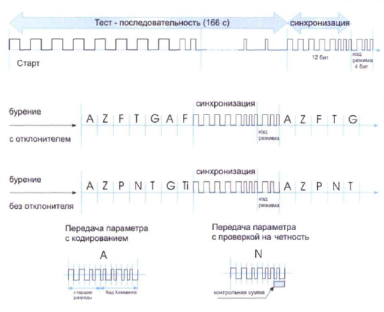
Рис. 1. Структура данных, передаваемых с забоя.
Литература:
1. Брунов Б. Я., Гольденберг Л. М., Кляцкин И. Г., Цейтлин Л.А! Теория электромагнитного поля. М.-Л., Госэнергоиздат, 1962.
2. Вернер М. Основы кодирования. М. «Техносфера» 2004.
3. Ковшов Г. Н., Алимбеков Р. И., Жибер A. B. Инклинометры (основы теории и проектирование). Уфа 1998
4. Рабинер Л., Гоулд Б. Теория и применение цифровой обработки сигна¬лов. М., Мир, 1978

