В интересах повышения точности определения местоположения беспилотного летательного аппарата в спутниковой радионавигационной системе в условиях воздействия многих видов помех разработано исследование всех известных источников погрешности в зависимости от причины их происхождения.
Ключевые слова: спутниковая радионавигационная система, беспилотный летательный аппарат, точность определения местоположения.
Пространственное место беспилотного летательного аппарата БПЛА в спутниковой радионавигационной системе СРНС определяется относительно спутников. Понятно, что чем точнее известно местоположение спутников на орбитах, тем точнее будут определены координаты беспилотного летательного аппарата.
Составляющие дальномерной погрешности в зависимости от причины их происхождения можно разделить на три группы: погрешности, вносимые в навигационной системе НС СРНС; погрешности, вносимые на трассе распространения; погрешности, вносимые аппаратурой пользователя [2]. основными из которых являются [3,11,12]:
— несовершенство аппаратуры, размещенной на НС;
— несоответствие эфемерид параметрам движения НС;
— условия распространения радиосигналов в ионо- и тропосфере;
— многолучевое распространение радиосигнала;
— несовершенство приемника;
— взаимное расположение БПЛА и НС выбранного рабочего созвездия.
Несовершенство аппаратуры НС определяется прежде всего точностью хранения шкалы системного времени, которая зависит от нестабильности частоты эталона времени и частоты [3]. Эти погрешности непосредственно и весьма значительно влияют на определение расстояния до спутника [4]. СРНС работает в своем «системном», времени, определяемым наземным центральным синхронизатором высокой точности (нестабильность



Несоответствие эфемерид фактическим параметрам движения НС обусловлено неточностью их прогноза из-за воздействия на спутники в процессе движения их по орбитам случайных возмущений и факторов, не поддающихся точному учету (космический ветер, непостоянство гравитационных полей и др.). Очевидно, что с увеличением интервала времени, прошедшего после закладки эфемеридной информации в память бортового компьютера НС, точность прогноза снижается. В настоящее время неточность прогноза эфемерид за сутки приводит к погрешности измерения псевдодальности до НС около 3 м [3].
Распространение радиосигнала в ионо- и тропосфере: Существование данной группы погрешностей обусловлено особенностями распространения рдиоволн в атмосфере Земли и околоземном космическом пространстве [5]. Распространение сопровождается рефракцией, т. е. искривлением его траектории [3]. Атмосфера, как ионосфера, так и тропосфера, могут искажать сигналы, заставляя спутники казаться дальше, чем они есть на самом деле [12]. Это приводит к дополнительной неизвестной задержке сигнала. Влияние ионо- и тропосферной рефракции проявляется в гораздо большей степени для сигналов, принимаемых от НС, находящихся вблизи плоскости горизонта (назовем их горизонтными), чем от НС, находящихся вблизи зенита (зенитных НС). Для зенитных НС влияние тропосферной рефракции приводит к погрешности измерения псевдодальности до


При многолучевом распространении при работе НАП в городских условиях, а также в любых других ситуациях, характеризующихся наличием отражающих предметов, на вход приемника, кроме сигналов НС, поступают переотраженные от местных предметов сигналы [4]. Уровень мощности отраженного сигнала может быть соизмерим с прямым сигналом [2]. Их сложение с полезным сигналом приводит к образованию результирующего сигнала, который флуктуирует по амплитуде, фазе и задержке огибающей. Эффект многолучевого распространения значителен для наземных потребителей и может приводить к погрешности измерения псевдодальности до нескольких сотен метров [3]. степнь проявления эффекта многолучевости во многом зависит от взаимного расположения НС, приемной антенны НАП и окружающих объектов [5].
Погрешности аппаратуры потребителя в измерение псевдодальности, зависят от отношения сигнал/шум на входе, способа обработки сигнала (когерентный или некогерентный) и навигационной информации, внутренних шумов, нестабильности опорного генератора и других факторов [3]. При этом диапазон погрешностей оценивания псевдодальности составляет




Существенное влияние на точность навигационных определений в спутниковых РНС оказывает взаимное пространственное расположение потребителя и НС. Для оценки этого влияния используется понятие геометрического фактора, или GDOP (Geometric Dilution of Precision) [3,13]. Следовательно, возникает задача выбора оптимального рабочего созвездия НС, при котором будет обеспечиваться заданная точность измерений, как приведено на рис. 1. [4].
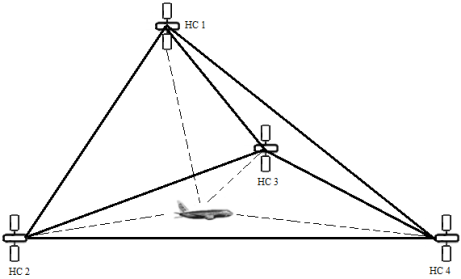
Рис. 1. Выбор рабочего созвездия
Параметры DOP подразделяются [1,6,7,10]:
— DOP (Horizontal) — снижение точности в горизонтальной плоскости;
— VDOP (Vertical) — снижение точности в вертикальной плоскости;
— PDOP (Position) — снижение точности по местоположению;
— TDOP (Time) — снижение точности определения поправки часов;
— GDOP (Geometric) — суммарное геометрическое снижение точности по местоположению и времени.
Коэффициент геометрии численно определяется для случая, когда погрешности определения псевдодальностей до четырех НС равновелики и не коррелированны. В общем случае его можно представить выражением [4,8,9]
где

Выражение (1) может быть записано в другом виде:
где

В свою очередь, пространственный коэффициент может быть разбит на составляющие, характеризующие точность определения координат потребителя в горизонтальной и вертикальной плоскостях:
где

Следовательно, HDOP можно представить выражением [13]

Коэффициент потери точности GDOP является наиболее общей характеристикой, отражающей геометрию положения и оценку поправки часов. Как правило, значения GDOP больше 5 считаются слабыми, а при GDOP больше 7 ответственные измерения обычно не производятся. Средняя величина HDOP и VDOP — около двух. Коэффициенты DOP можно вычислять на будущее по приближенному положению приемника и предсказанным эфемеридам спутника [7].
Значения геометрических факторов, обеспечиваемых орбитальной группировкой, и вероятности видимости


Таблица 1
Геометрический фактор в СРНС
|
Параметры |
Число видимых НС (
| |||||
|
4 |
5 |
6 |
7 |
8 |
9 | |
|
|
1 |
1 |
1 |
1 |
0,91 |
0,58 |
|
|
1,41 |
1,26 |
1,15 |
1,03 |
0,95 |
0,89 |
|
|
2,0 |
1,75 |
1,7 |
1,61 |
1,6 |
1,55 |
|
|
1,13 |
1,03 |
1,03 |
0,95 |
0,93 |
0,91 |
|
|
2,45 |
2,16 |
2,05 |
1,91 |
1,86 |
1,79 |
|
|
2,69 |
2,39 |
2,3 |
2,13 |
2,08 |
2,01 |
|
|
18,3 |
16,2 |
15,4 |
14,3 |
13,9 |
13,4 |
|
|
1,83 |
1,62 |
1,54 |
1,43 |
1,39 |
1,34 |








Из представленных данных можно видеть, что потенциальная точность определения координат, заложенная в GPS при использовании С/А(СТ) кода, будет составлять
Из представленных данных видно, что одним из основных источников погрешности измерений навигационных параметров и, следовательно, координатных определений является ионосферная погрешность. В отличие от других видов погрешностей, полностью скомпенсировать эту погрешность наиболее трудно, поскольку ее величина зависит не только от регулярной, но и от текущих гелио-геофизических условий. В связи с этим, настоящее время погрешности навигационно-временны́х определений НВО, обусловленные влиянием неоднородной и нестационарной ионосферы, являются основным негативным фактором, ограничивающим возможности достижения потенциально возможных характеристик функционирования СРНС GPS и ГЛОНАСС [5].
Таким образом, для повышения точности определения местоположения беспилотного летательного аппарата БПЛА в спутниковой радионавигационной системе СРНС. Необходимо работать над тем, чтобы свести влияние этих параметров, упомянутых выше, к минимуму, и принять соответствующие меры на каждом из этих параметров.
Литература:
- Сарайский Ю. Н., Липин А. В., Либерман Ю. И. Аэронавигация. Часть II. Радионавигация в полете по маршруту: Учебное пособие. /Университет ГА. С-Петербург, 2013, 298 с.
- Михайлов, Н. В. Автономная навигация космических аппаратов при помощи спутниковых радионавигационных систем / Н. В. Михайлов. — Санкт-Петербург: Издательство «Политехника», 2014. — 362 с.
- Скрыпник, О. Н. Радионавигационные системы воздушных судов: Учебник / О. Н. Скрыпник. — М.: ИНФРА-М. — 2018. — 348 с.
- Тяпкин, В. Н. Методы определения навигационных параметров подвижных средств с использованием спутниковой радионавигационной системы ГЛОНАСС: монография / В. Н. Тяпкин, Е. Н. Гарин. — Красноярск: Сиб. федер. ун-т, 2012. — 260 с.
- Демьянов В. В. Особенности функционирования спутниковых радионавигационных систем в неблагоприятных гелио-геофизических условиях / В. В. Демьянов. — Иркутск: ИрГУПС, 2010. — 212 с.
- Демиденко П. П. Судовые радиолокационные и радионавигационные системы: учебное пособие. Одесса, 2008. — 334 с.
- Антонович, К. М. Космическая навигация: учеб. пособие. — Новосибирск: СГУГиТ, 2015. — 233 с.
- Перов А. И., Харисов В. Н. ГЛОНАСС. Принципы построения и функционирования / под ред. А. И. Перова, В. Н. Харисова. 4-е изд., перераб. и доп. — М: Радиотехника, 2010. — С. 800.
- Перов А. И., Устинов А. Ю. Целесообразность размещения псевдоспутников и мощность их излучения на основе анализа обобщенного геометрического фактора в радионавигационных системах// Радионавигационные технологии. Вып. 5. Сб. статей / Под ред. А. И. Перова. — М.: Радио-техника, 2016. — 51–60 с.
- Skrypnik O. N. Radio Navigation Systems for Airports and Airways // Springer Aerospace Technology- Singapore Pte Ltd. 2019, 239 p.
- Acharya R. Understanding Satellite Navigation, Academic Press, Elsevier Inc. San Diego — USA 2014, — 391 p.
- Madry S. Global Navigation Satellite Systems and Their Applications // SpringerBriefs in Space Development- New York USA, 2015 -117 p.
- Shusen T. GNSS Systems and Engineering // JohnWiley & Sons, Singapore, 2018- 285 p.

