В работе были рассмотрены вопросы организации управляемого движения экзоскелета в процессе подъема груза. Разработка экзоскелета с гидравлическим приводом, управляемым оператором через систему рычагов, контролирующих гидрораспределители.
Ключевые слова: экзоскелет, экзоскелет с гидравлическим приводом, гидрораспределители, гидроцилиндр, подъем груза.
Наука и технологии —это постоянное соперничество изобретательности человека и природы. С древнейших времен человек стремится изменить окружающий мир для улучшения своей жизнедеятельности, не нарушая законов природы. Некоторые беспозвоночные имеют внешний скелет, но у человека он отсутствует.
Сейчас появляется потребность в устройствах, усиливающих физические способности человека. Одним из путей разрешения предоставленной задачи считается использование человеко-машинных систем (устройств), где взаимодействие оператора и механизма приводит к отличным показателям человеческих способностей. Одним из примеров разработок систем считаются экзоскелеты.
Экзоскелет — прибор, предназначенный для восполнения утраченных функций, наращивания силы мускул человека и расширения амплитуды перемещений за счёт наружного каркаса и приводящих частей. Аналогичные приборы могут применяться в военном деле (антитеррор, штурмовые и саперные операции, установка трудной брони и вооружения) и в будничной жизни. В мирной жизни у экзоскелетов есть задачки трёх типов: строительно-логистическая, медицинская и особая. Строительный экзоскелет имеет возможность нести на себе строительное оснащение или же применяться в качестве погрузчика. Медицинские экзоскелеты можно использовать как инвалидные коляски для больных людей и инвалидов. Особые экзоскелеты могут быть как оборудованием для спасателей, так и механизированными водолазными или же защитными костюмами [5, c.253]. В настоящее время проводится функциональная разработка экзоскелетов. Разработки необходимы для создания систем вертикального положения человека и усиления его физических возможностей. Предлагается рассмотреть вопрос о применении экзоскелета для подъема груза в том случае, когда для этого потребуется перемещение всех механизмов (рук, ног и корпуса) [6, c24]. Аналогичные действия аппарата равносильны различной работе с грузом и функциональными действиями оператора. Организация управляемого подъема груза из такового исходного положения соединит в себе задачи вертикализации механизма и манипулирования груза с поддержкой «рук» экзоскелета.
Для исследования рассмотрим модели экзоскелетов XOS 2 и HAL (Рис.1,2) XOS 2, при весе в 80 килограммов, позволяет человеку поднять 90 дополнительных килограммов, а экзоскелет HAL японского производителя роботов Cyberdyne обеспечивает возможность ходить людям с ограниченными возможностями и поднимать тяжелые грузы.

Рис. 1.
Рис. 2.
Предлагается система с гидравлическим приводом, управляемым оператором через систему рычагов, контролирующимися гидрораспределителями. В отличии от имеющихся аналогов, в разработке системы кое-какие суставные узлы станут двигать мускульные силы оператора. Для снижения нагрузки на позвоночник, мышцы и суставы человека используется полный каркас человеческого тела, дополнительные гидроцилиндры в коленных, локтевых суставах и суставах ступни, в поясничном отделе. Ступоходы экзоскелета изготавливаются из плотного амортизирующего материала. Схему конструкции ноги можно рассмотреть на рисунке 3: [4]
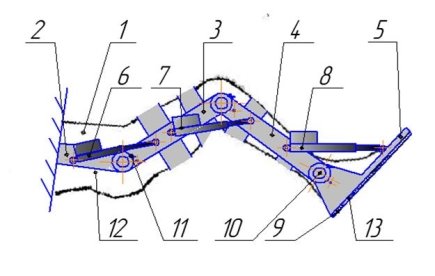
Рис. 3. Схема конструкции ноги экзоскелета человека (вид сбоку): 1 — Нога человека; 2 — Стойка; 3 — Бедренное звено; 4 — Голень; 5 — Стопа; 6, 7, 8 — Приводы линейного перемещения; 9 — Резиновая подошва; 10 — Датчик угла поворота (энкодер); 11 — Предохранительный концевой датчик; 12 — Ремни для укрепления на ноге человека; 13 — Датчик нагрузки на опорную пяту. [4]
Ключевое различие в системе управления заключается в том, что она построена на основе механизмов, исключая электронику. Это повышает возможности ремонта и снижает стоимость изделия. В силовой установке возможно применять малогабаритные бензогенераторы, которые объединяются с электромотором, который приводит в движение вал гидронасоса. Управлять данным механизмом возможно при помощи 12-клапанного гидрораспределителя. Штоки гидрораспределителя можно приводить в движение при помощи тяг, контролируемых оператором, что упрощает починку в полевых условиях. Дополнительно возможно ввести датчик нагрузки и контроля напряжения питания для защиты батареи от полного разряда и информирования пользователя об оставшемся времени автономной работы. Примерная схема указана на рисунке 4. [2]
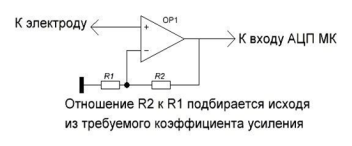
Рис. 4 Схема датчика [2]
Основными преимуществами данного экзоскелета являются энергетическая свобода, дешевизна в сборке и ремонте в разных условиях.
Механические системы очень широко распространяются в современной технике. Самым востребованным направлением в развитии и внедрении робототехнических систем являются экзоскелеты. Следовательно, с развитием новых технологий в разных областях науки, будут открываться новые возможности в изготовлении новых материалов, экзоскелеты будут усовершенствоваться, уменьшаться в размерах и становиться более точными.
Литература:
- Поезжаева Е. В. «Концепция развития робототехники». — Пермь: ПНИПУ, 2017. — 440 с.
- Экзоскелет своими руками // Глобальная Научно-Техническая Информация. URL: http://gnti.ru/Экзоскелет %20своими %20руками/1Z9kyt6ShrI (дата обращения: 20.12.2017).
- Ekso Bionics. URL: http://eksobionics.com/ (дата обращения: 24.12.2017)
- Применение мехатронных систем в медицинской технике // Официальный портал Юго-Западного государственного университета. URL: https://www.swsu.ru/structura/up/fiu/tmim/med-teh/#3 (дата обращения: 30.12.2017).
- Верхов С. С. Экзоскелет с гидравлическим приводом // XII Международная научная конференция «Физика и радиоэлектроника в медицине и экологии». — 2016. — № 1. — С. 253–254.
- С. Ф. Яцун, С. И. Савин, А. С. Яцун, Г. В. Климов/. Кинематический анализ экзоскелета в процессе подъема груза // Известия Юго-Западного государственного университета Серия Техника и технологии. — 2015. — № 3. — С. 24–30.

