





В статье рассмотрена конструкция робота-хирурга, предназначенного для робот-ассистированной лапароскопии. Представлено расширение возможности данного робота, при помощи системы отслеживания движения глаз хирурга и передачи ему тактильных ощущений.
Ключевые слова: хирургическая система, консоль хирурга, графический процессор, медицина, робот-хирург, система отслеживания, оптоволоконный жгут, линза
Хирургическая система Da-Vinci представляет собой сложную роботическую платформу, предназначенную для расширения возможностей хирурга. Система состоит из трех консолей: консоли хирурга, консоли пациента и консоли технического зрения.
Хотя ее часто называют «робот», система Da-Vinci не может двигаться или действовать самостоятельно, она полностью находится под управлением хирурга.
Одно из основных отличий комплекса Da-Vinci — то, что доктор оперирует не стоя, а сидя за консолью хирурга. В стереовидоискатель хирург видит сильно увеличенное 3D-изображение операционного поля (внутренностей организма). Для работы хирург использует манипуляторы, которые действуют как джойстики. Через манипуляторы Da-Vinci транслирует все движения рук хирурга (и пальцев, и запястий) в точные движения миниатюрных инструментов, находящихся на консоли пациента.
Консоль пациента вмещает до трех миниатюрных инструментов EndoWrist и одну 3D-камеру. Инструменты и камера вводятся в тело пациента (в нужную анатомическую область) через разрезы длиной 1–2 см. Для выполнения каждого вида операций используется свой особый набор инструментов, специально разработанный для наиболее эффективной и удобной работы хирурга. Во время проведения операции один ассистент должен находиться у консоли пациента. Этот член операционной команды помогает хирургу с переключением между инструментами. На сенсорном экране консоли технического зрения ассистент видит то же изображение, что и хирург в стереовидоискателе. Консоль технического зрения содержит центральный обрабатывающий центр и видеосистему, включая основной блок, блок управления камерой и осветитель
В настоящее время присутствует сложность выполнения лапароскопической операции. Проблема состоит в том, что графический процессор, который установлен в консоли хирурга, не способен создавать статическую 3D-модель сердца, но присутствует возможность запрограммировать хирургического роботаDa-Vinciтак, чтобы он сам компенсировал биения сердца, т. е. хирург (за пультом управления) видит перед собой неподвижное сердце и спокойно проводит на нем операцию, а робот Da-Vinci двигает скальпелем и манипуляторами, самостоятельно компенсируя движения сердца.
Для расширения возможностей необходимо оборудовать манипулятор робота Да Винчи системой отслеживания глаз хирурга и передачи ему тактильных ощущений, как будто он проводит операцию своими руками. То есть манипуляторы передают обратную связь от роботизированной руки, которая непосредственно касается пациента (рис. 1).
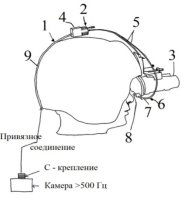
Рис. 1.
Предлагается модернизация данной конструкции: устройство может включать один или большее число компонентов, включая камеру, имеющую, по меньшей мере, один объектив, направленный в сторону, по меньшей мере, одного глаза пользователя.
С помощью камеры может осуществляться мониторинг движений глаз пользователя, а движение глаз может быть сопоставлено с указателем на дисплее, чтобы указатель следовал за движением глаз, например, подобно компьютерной мыши. При желании, камера может осуществлять мониторинг глаз пользователя по заданным показателям, например, по морганиям в заданные промежутки времени, которые могут соответствовать инструкциям по выполнению одной или большего числа команд, отождествляемых с указателем на дисплее, например, подобно двойному щелчку компьютерной мыши.
Как показано, устройство включает шлем 1, который может надеваться на голову пользователя, и биосенсорную конструкцию 2. Шлем 1 включает очки 3. Как показано, биосенсорная конструкция 2 включает камеру 4, установленную на верхней части шлема 1, например, используя липучку типа «Velcro», полоски и/или другие временные или сменные фиксаторы. Это может позволить снимать камеру 2, когда она не применяется.
Для получения изображения глаз пользователя от одной или большего числа «эндокамер» биосенсорная конструкция 2 также включает один или большее число оптоволоконных жгутов 5, которые проходят от камеры 4 к передней стороне шлема 1. Как показано, пара оптоволоконных жгутов 5 проходит от камеры 4 к соответствующим трубкам очков 3.
Концы 6 оптоволоконных жгутов 5 могут быть присоединены постоянно или присоединяться съемно к очкам 3, например, к кронштейнам 7, присоединенным к очкам 3, или иным образом отходящим от них.
Конец 6 каждого оптоволоконного жгута 5 может включать одну или большее число линз, например, линзу 8 объектива, которая может фокусировать световод на глаз пользователя. Кроме того, линза 8 объектива может оптимизировать дистанцию обзора, например, до приблизительно двух дюймов, таким образом, улучшая фокусирование в глазах пользователя.
Внешняя камера может позволить или облегчить временную и пространственную синхронизацию, позволяя перекрывать или наслаивать изображение(я) с эндокамеры на изображения с внешней камеры для отслеживания глаза идентифицировать «куда», «на что» и/или «как долго» глаза пользователя смотрят по отношению к направлению положения головы пользователя.
Изображения от камеры 4 могут быть переданы от устройства по кабелю 9. Например, устройство отображения может преобразовывать оптические изображения из активной области в электрические сигналы, которые могут быть переданы по кабелю 9 на один или большее число процессоров и/или контроллеров.
Данная модернизация возможна, если заменить стандартный графический процессор на новый от компании NVidia — NVIDIA TESLA P100 (рис. 2).
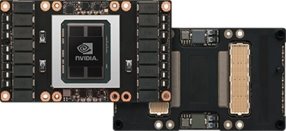
Рис. 2
На данный момент NVIDIA Tesla — ведущая мировая платформа для ускоряемых дата-центров. Она объединяет в себе графические ускорители, ускоренные вычислительные системы, технологии коммуникации, инструменты для разработки и приложения для ускорения научных открытий и анализа данных. В основе платформы NVIDIA Tesla лежат массивно параллельные графические процессоры, которые обеспечивают значительно более высокую скорость обработки данных для задач, требующих большого объема вычислений.
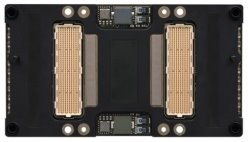
Рис. 3.
В этом году NVIDIA порадовала любителей нерядовых новинок в сегменте дискретной графики картами на 16-нм чипах GP100 и GP102. Различия между старшим GPU для HPC-систем (GP100) и его производным — адаптером для широкого круга задач (GP102) оказались весьма существенными (рис. 3). В частности, проприетарный интерфейс NVLink, отличающий серверный графический процессор от собрата, способен обеспечивать пропускную способность в 40 Гбайт/с на один порт. Для сравнения, аналогичное значение для разъёма PCI Express 3.0 x16 составляет 16 ГТ/с (15,75 Гбайт/с), а для будущего PCI Express 4.0 x16–32 ГТ/с (31,5 Гбайт/с). При этом одним соединением NVLink дело не ограничивается. Так, у ускорителя Tesla P100 на чипе Pascal GP100 четыре порта NVLink (рис.4), и, соответственно, пиковая пропускная способность достигает 160 Гбайт/с (4 × 40 Гбайт/с).
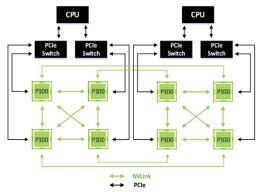
Рис. 4.
Вторая версия NVLink принесёт увеличение пропускной способности интерфейса с 20 до 25 Гбит/с на контакт, с 40 до 50 Гбайт/с на один порт и со 160 до 200 Гбайт/с на один GPU. Преимущество NVLink над PCI Express 4-го поколения будет весьма впечатляющим — 6,35 раза (четыре порта NVLink против 16-скоростного PCI-E 4.0).
‒ Простой контроль и управление кластерами на основе GPU с помощью инструментов для управления системой NVIDIA
‒ Плавное развертывание приложений благодаря сертификации НППО
‒ Тестирование на отсутствие ошибок в самых тяжелых условиях
Таким образом, данное решение предоставит хирургам бесконтактный доступ к критически важным и срочным данным в операционной, позволяя им просто использовать свой взгляд. Это поможет снизить необходимость сложных взаимодействий между инструментами медицинской визуализации и хирургом, что, следовательно, сделает процесс гораздо более эффективным и безопасным, а с помощью данного Nvidiatesla p100 хирург сможет видеть четкую и статическую 3D-модель сердца (рис. 5).
Рис. 5.
Литература:
- Консоли робота // da Vinci. Хиркргия. URL: http://www.robot-davinci.com/about/units/ (дата обращения: 11.11.2017).
- Робот да Винчи // LiveMD. URL: http://www.livemd.ru/tags/robot_da_vinchi/ (дата обращения 11.11.2017).
- Поезжаева Е. В., Теория механизмов и механика машин. Промышленные роботы: учеб. Пособие: Изд-во Перм. Гос. техн. ун-та, 2016.-Ч.2.-185с. Гриф УМОАМ.
- Поезжаева Е. В. Промышленные роботы: учеб. пособие 3 кн.– Пермь: Издательство ПГТУ. Пермь 2009. Гриф МГТУ им. Н. Э. Баумана.
- Поезжаева Е. В. Концепция развития робототехники: учеб. Пособие: Изд-во Перм. Гос. техн. ун-та, 2017.-480с. Гриф МГТУ им. Н. Э. Баумана.
- TESLA // Nvidia. URL: http://www.nvidia.ru/object/tesla-p100-ru.html (дата обращения 11.11.2017).
- ISC 2017 // Servernews URL: https://servernews.ru/tags/tesla %20p100 (дата обращения 11.11.2017).
