1. Введение
Последние несколько лет в информационных технологиях большую актуальность приобретает нейроинформатика, содержанием которой служит разработка и исследование методов решения самых разнообразных задач с помощью искусственных нейронных сетей, построенных на стандартных искусственных нейронах.
Достоинствами нейронных сетей являются, с одной стороны, возможности воспроизводить чрезвычайно сложные нелинейные многомерные зависимости. С другой стороны они просты в использовании. Нейронные сети самообучаются на примерах. Пользователь подбирает представительные данные, а затем запускает алгоритм обучения, который автоматически воспринимает структуру данных.
Нейронные сети возникли из исследований в области искусственного интеллекта, а именно, из попыток воспроизвести способность биологических нервных систем обучаться и исправлять ошибки, моделируя структуру мозга. Они привлекательны с интуитивной точки зрения, ибо основаны на примитивной биологической модели нервных систем. Поэтому они успешно применяются в самых различных областях – технике, бизнесе, медицине, геологии, физике. Нейронные сети входят в практику везде, где появляется необходимость решать задачи управления, прогнозирования, классификации.
Одним из объектов приложения нейроинформатики является процесс Ромелт, представляющий собой единственный реализованный в мире одностадийный процесс жидкофазного восстановления железа из различных видов окисленного железосодержащего сырья, применяемого без предварительной подготовки, с использованием в качестве топлива и восстановителя дешевого энергетического некоксующегося угля. Этот экономичный и экологически чистый процесс разработан коллективом учёных МИСиС под руководством профессора Роменца В. А. [1].
Ромелт является сложным динамично развивающимся процессом. На него воздействует большая совокупность взаимосвязанных факторов, описываемых системой наблюдаемых показателей. Для оценки его состояние в каждый конкретный момент времени необходимо зафиксировать значения очень большой совокупности параметров. При этом формировать экспертные оценки или выполнять экспериментальные измерения необходимо достаточно часто, так как процесс Ромелт очень динамичен и не всегда достаточно устойчив и предсказуем (например, возможны неожиданные вспенивания шлака и другие самопроизвольные нежелательные явления).
В МИСИС ведутся исследования по совершенствованию управления процессом Ромелт. Так, результатом одного из них явилась математическая динамическая модель на основе системы дифференциальных уравнений и функций. Она представляет собой источник данных, необходимых для формирования решений по реализации воздействий на этот процесс. Между тем, безусловно, своевременны и актуальны попытки применения для управления процессом Ромелт методов и средств нейроинформатики.
В настоящей статье представлены результаты такого опыта. Речь идет разработке математического и программного обеспечения для процесса прогнозирования значений показателей режимов процесса Ромелт, а также для управления этим процессом с использованием методов и средств нейросетевой технологии.
2. Прогнозирование значений показателей режимов процесса Ромелт.
В качестве объекта прогнозирования были использованы реальные данные, которые поступили с опытно-промышленной установки Ромелт в Казахстане, которые представляли собою массив из 5581 значений наблюдаемых переменных, характеризующих состояния печи, в том числе:
входные значения:
- расхода кислорода на нижние фурмы (кг/c);
- расхода кислорода на верхние фурмы (кг/c);
- расхода воздуха на нижние фурмы (кг/c);
- скорости загрузки в ванну железосодержащей шихты;
- скорости загрузки в ванну железосодержащей шихты (с пересчетом на скорость загрузки FeO в шихте);
- скорость загрузки в ванну угля (с пересчетом на скорость загрузки угля, из которого удалены летучие и влага);
выходные значения:
- соотношения концентраций  в печном газе после дожигания;
в печном газе после дожигания;
- содержания FeO в шлаке;
- температуры шлака.
Для прогнозирования значений этих переменных была выбрана трёхслойная нейронная сеть: 5 нейронов во входном слое, 100 нейронов в промежуточном слое и 3 нейрона в выходном слое. В качестве функций адаптаций по входному и выходному слоям были выбраны соответственно тангенциальная и линейная функции.
Для прогнозирования перечисленных выше переменных была выбрана трёхслойная нейронная сеть (рис. 1): 5 нейронов во входном слое, 100 нейронов в промежуточном слое и 3 нейрона в выходном слое. В качестве функций адаптаций по входному и выходному слоям были выбраны соответственно тангенциальная и линейная функции.
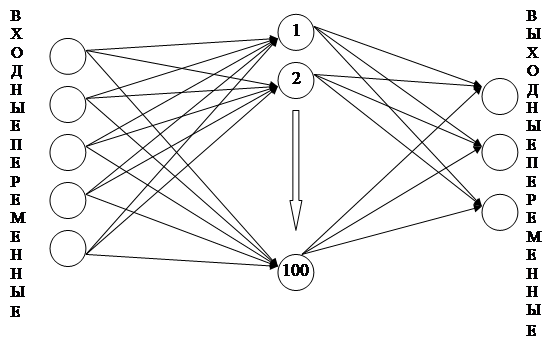
Рисунок 1 – Структура нейронной сети
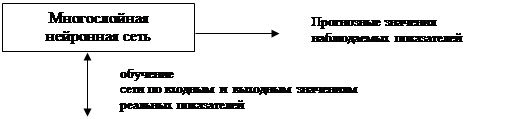
На рисунке 2 показана функциональная схема, по которой проводились расчеты, по формированию этих прогнозов.
 | |||
| |||
Рисунок 2 – Функциональная схема формирования прогнозов
Многослойная нейронная сеть обучалась на данных опытно-промышленной установки Ромелт, и определяла их прогнозные значения.
С целью формирования нейронной сети был использован пакет Neural Networks Toolbox (NNT) системы математического моделирования MATLAB фирмы Math Works.
Для достижения необходимой точности прогнозов были проведены эксперименты по определению наилучшего объема обучающей выборки, на основе которых было установлено, что он соответствует, приблизительно пятистам элементам массива (см. рис. 3).
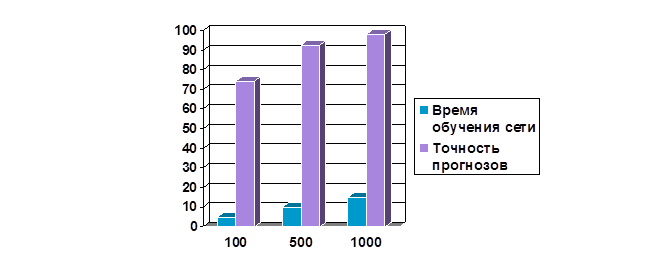
Рис.3 Объемы обучающей выборки на точность прогнозов и время обучения нейросети.
Результаты прогнозов, представлены на рис. 4.
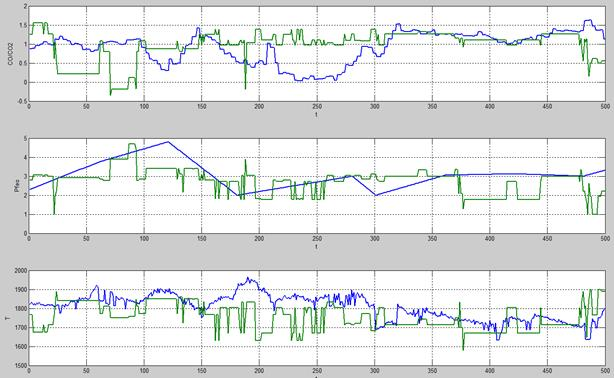
Рисунок 4. Динамика эталонных и прогнозных значений выходных переменных.
На графиках рис. 4 представлена динамика эталонов и прогнозов трех указанных выше выходных переменных. Эталонным значениям соответствует зеленый цвет. Прогнозным - синий.
Расчет значений прогнозных показателей выполнялся в соответствии с режимом "скользящего прогноза". Сначала выбирался интервал обучения сети (500 элементов массива). Затем определялся прогноз на следующий (по времени) интервал по разработанным алгоритмам. Далее анализировались полученные результаты и сеть снова обучалась, но уже на интервале, на котором производился прогноз (т.е. происходил "сдвиг" обучающей выборки на 500 элементов массива «вперед по времени». Процесс продолжался до тех пор, пока не были просчитаны все 5581 элементов массива. Таким образом достигалась максимальная точность прогнозов (более 90%).
Как видно из графиков, представленных на рис. 4, результаты сравнения динамик эталонных и прогнозных значений выходных переменных свидетельствуют о достоверности полученных результатов в отношении реальных данных, которые поступили с опытно-промышленной установки Ромелт в Казахстане.
2. Управление процессом Ромелт с использованием методов и средств нейросетевой технологии.
Ромелт – динамичный процесс с быстро изменяющимися во времени следующими входными показателями:
- поток оксидов железа (FeO), загружаемого в ванну (кг/c);
- поток угля, загружаемого в ванну (с учётом пиролиза и удаления влаги), (кг/c);
- содержание расхода кислорода на нижние фурмы (кг/c);
- расход кислорода на дожигание отходящих газов (кг/c).
- поток шихтовых компонентов для расчёта выходного потока шлака, (кг/с);
- температура дутья, подаваемого на нижние фурмы, (K);
Выходными показателями являются:
- концентрация (FeO) в шлаке, (%, масс.);
- содержание в шлаке капель восстановленного металла, Ск (%, масс.);
- содержание углерода в металле, [C] (%, масс.);
- содержание в шлаке частиц ококсованного угольного остатка Ств (%, масс.);
- температура шлаковой ванны Т, К.
Управление им на основе применения нейросетевых систем имеет серьезные перспективы. Такого рода системы относятся к классу нелинейных динамических систем. Искусственные нейронные сети, которые входят в их состав могут выполнять различные функции, включая: управление, оценку состояния и мониторинг технологических процессов, прогнозирование ситуаций, диагностику технологического оборудования.
Нейросетевые системы управления позволяют эффективно реализовать следующий набор функций, выполняемых искусственной нейронной сетью:
1) функцию адаптивного регулятора нелинейного многосвязного объекта;
2) функцию идентификатора для оценивания вектора состояния нелинейных систем;
3) функцию оптимизатора для настройки параметров регуляторов с типовыми законами регулирования и для настройки параметров алгоритмов адаптации, реализуемых на основе известных методов теории адаптивных систем.
Принципиальная схема функционирования нейросетевых систем управления в ходе выполнения данного эксперимента показана на рисунке 5.
| |||
 | |||
| |||
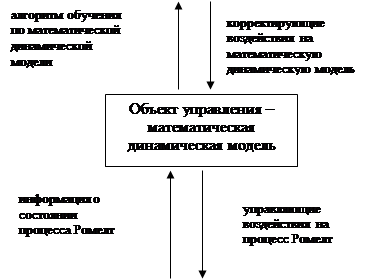
Рисунок 5 - Принципиальная схема функционирования нейросетевых систем управления процессом Ромелт
В соответствии с функциональной схемой, представленной на рисунке 5, искусственная многослойная нейронная сеть нейросетевой системы управления обучается на экспериментальных данных значений входных и выходных показателей математической динамической модели процесса Ромелт и прогнозирует их значения. На основе этих прогнозов в математическую модель вносятся соответствующие корректировки. С учетом этих корректировок формируются и реализуются управляющие воздействия на процесс Ромелт.
Наиболее перспективным условием работы нейросетевых систем управления является совмещение процессов обучения и управления, когда управление осуществляется в режиме on-line. В нашем эксперименте использовались функциональные структуры систем управления с многослойными сетями, обучающимися по алгоритму скоростного обратного распространения ошибки («Вариант SBP») и алгоритму прогноза ошибки («Вариант ВРР»).
На рис. 6 показана функциональная структура системы, соответствующей Варианту ВРР.
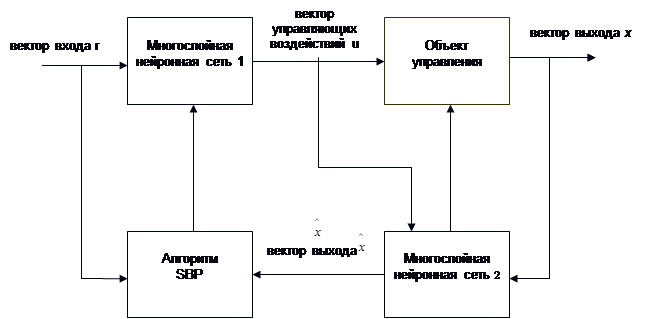
Рисунок 6. Вариант SBP
Как видно из рис. 6, алгоритм зависит в явном виде от параметров и структуры объекта управления [2]. Работа системы состоит из двух основных этапов. На первом этапе происходит идентификация объекта управления. Результатом идентификации является обученная многослойная нейронная сеть 2, которая затем будет использована в качестве модели объекта управления при настройке управляющей многослойной нейронной сети 1.
Функциональная структура системы управления по Вариант ВРР показана на рис. 7.
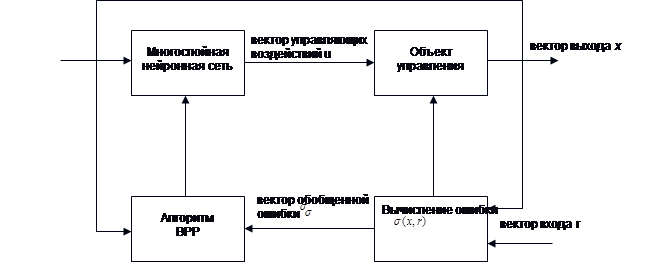
Рисунок 7. Вариант ВРР
Из рис. 7 следует, что обучение по этому варианту может обеспечить согласованность процессов настройки коэффициентов сети и управления динамическим объектом [2]. Его применение не приводит к увеличению вычислительной сложности алгоритма управления.
Таким образом, можно сформулировать следующие выводы:
1. Применение методов и средств нейроинформатики для управления процессом Ромелт актуально и перспективно.
2. Созданное математическое и программное обеспечения прогнозирования режимов процесса Ромелт при проверке подтвердило свою работоспособность. После соответствующей его адаптации, в принципе может быть поставлен вопрос о дальнейших производственных испытаниях с целью формирования прогнозной информации, учитываемой в ходе формирования решений, связанных с управлением этим сложным инновационным процессом.
3. Использование систем с многослойными нейронными сетями для управления процессом Ромелт имеет определенные перспективы, но требует проведения дополнительных исследований, связанных, как с поиском решений по выбору адекватных МНС и алгоритмов их обучения, так и с доработкой их математического и программного обеспечения.
Список использованной литературы
1. Процесс Ромелт: к 75-летию МИСиС/ В. А. Роменец, В. С. Валавин, А. Б. Усачев: ред. В. А. Роменец. – М.: Изд-во МИСиС: Руда и металлы, 2005. – 399с.: + Библиогр. С. – (Металлургия и металловедение XXI века).
2. В.А. Терехов, Д.В. Ефимов, И.Ю. Тюкин Нейросетевые системы управления. – М.: Высшая школа, 2002.

