Введение
В связи с повсеместной автоматизацией производства широкое распространение получили промышленные роботы-манпуляторы, которые в совокупности с программируемым логическим контроллером образуют робототехнический комплекс. Применение такого робототехнического комплекса в производственном процессе позволяет рационально подойти к использованию трудовых ресурсов, повысить качество выполнения производственной технологической операции, снизить временные затраты на ее выполнение, снизить себестоимость продукции за счет уменьшения процента брака и снижения непроизводственных расходов (оплаты сверхурочных работ и простоев рабочих), увеличить выпуск продукции, повысить эффективность производства в целом [1]. Использование такого рода систем автоматизации предъявляет более высокие требования к технологичности изделий, к системе технической подготовки производства и квалификации кадров.
Анализ существующих робототехнических комплексов предполагает приобретение уже имеющихся систем, но обладающих, в большинстве случаев, излишней функциональностью, что делает их применение более универсальным, но в тоже время сказывается на чрезмерной стоимости, что в большинстве случаев неприемлемо для образовательного учреждения. В свою очередь, образовательные учреждения, располагая таким робототехническим комплексом и применяя его в ходе учебного процесса, способны выпустить квалифицированного и востребованного специалиста.
Таким образом, возникла необходимость в синтезе системы управления на базе программируемого логического контроллера.
Постановка задачи
Разработать и реализовать автоматизированную систему управления роботом-манипулятором PM-01 на базе ПЛК CX9001 с целью внедрения в состав учебного процесса. Система должна: осуществлять управление роботом-манипулятором; предоставлять возможность выбора режима управления (ручной, автоматический); предоставлять возможность формирования программ автоматического управления и их загрузки из базы данных; формировать трехмерную визуализацию с возможностью предварительного просмотра функционирования разрабатываемой программы на этапе отладки;
Аппаратная реализация системы
Промышленный робот-манипулятор РМ-01 - антропоморфный манипулятор с 6 вращательными шарнирами. Звенья манипулятора соединяются друг с другом в суставах и вращаются вокруг осей координат, идущих через центры суставов. Может использоваться в следующих основных направлениях: механизация и автоматизация одиночных технологических операций; механизация и автоматизация транспортных и погрузочно-разгрузочных операций на поточных линиях; комплексная автоматизация производств по видам технологии (сварка, штамповка и т.д.) с использованием универсального оборудования [2].
В состав звеньев манипулятора входят следящие приводы и зубчатые передачи. Каждое звено имеет свой следящий привод постоянного тока с постоянным магнитом. Для управления движениями манипулятора необходимо постоянно контролировать положение звеньев. Для этого на вал каждого серводвигателя установлен потенциометр. Вращение датчика обеспечивается от вала самого двигателя через скользящую муфту. Сигналы от датчиков индицируют положение звеньев. Серводвигатели оснащены электромагнитными тормозами, которые включаются при включении питания двигателей. Робот-манипулятор РМ-01 функционирует по жесткой программе и требует точного расположения деталей в месте их захвата [3].
Программируемый логический контроллер CX9001 является компактным контроллером, реализован на базе процессора IXP420 фирмы Intel с поддержкой технологии XScale, и тактовой частотой 266 МГц. Связь с ПК осуществляется через встроенный Ethernet-адаптер. Модули ввода/вывода соединены с процессорным модулем посредствам системной шины K-bus, обеспечивающей быструю передачу данных. Контроллер имеет 5 типов модулей ввода/вывода, распознавание которых происходит автоматически: модуль дискретных входов, модуль дискретных выходов, модуль аналоговых входов, модуль аналоговых выходов, трехфазный модуль [4]. Максимальное количество модулей ввода/вывода на один контроллер – 255.
Робот-манипулятор подключен к модулям ввода/вывода контроллера через устройство сопряжения. Схема электрическая принципиальная устройства сопряжения представлена на рисунке 1.
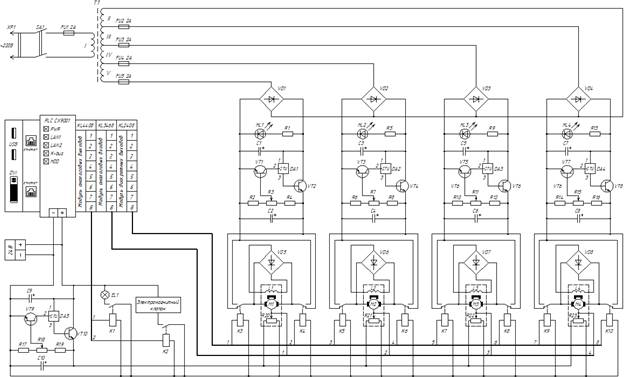
Рисунок 1 – Схема электрическая принципиальная устройства сопряжения
Программная архитектура системы
Архитектура системы представлена тремя уровнями. Первым уровнем является сервер СУБД Firebird, на котором реализован ряд хранимых процедур, для выполнения основных операций с базой данных. Вторым уровнем в архитектуре системы является сервер автоматизации – система TwinCAT. Система автоматизации TwinCAT – программное обеспечение для автоматизации управления ПЛК CX9001 на базе персонального компьютера. TwinCAT состоит из runtime-системы управления в режиме реального времени, среды программирования, диагностики и конфигурирования системы. Все приложения Windows могут обращаться к данным TwinCAT с помощью интерфейсов Microsoft (OPC, OCX, DLL). Программы для ПЛК создаются на одном или нескольких языках стандарта IEC 61131-3 (МЭК 61131) [5]. Третий уровень архитектуры системы – уровень клиентских приложений, который представлен приложением «Оператор». Данное приложение реализует следующие функции: выбор режима управления (ручной режим, автоматический режим), выбор программы управления из БД, непосредственное формирование и последующий запуск на исполнение рабочей программы, ведение статистики процесса управления. Связь приложения с автоматизированной системой TwinCAT осуществляется по технологии OCX. Архитектура система представлена на рисунке 2.
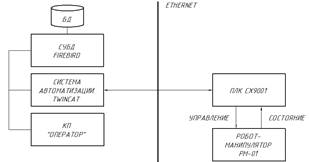
Рисунок 2 – Схема архитектуры системы
Приложение «Оператор» реализовано в виде отдельных модулей, взаимодействующих между собой. Состав модулей следующий: модуль управления, непосредственно осуществляет управление роботом-маниипулятором в режиме реального времени; модуль связи с объектом, предоставляет доступ к переменным состояния объекта управления, обозначенных в системе TwinCAT; модуль визуализации, осуществляет формирование 3-х мерной сцены отображения; модуль ведения базы данных, осуществляет работу с базой данных.
Основные алгоритмы системы
Алгоритм управления роботом-манипулятором: алгоритм предназначен для непосредственного управления роботом-манипулятором. В начале алгоритма осуществляется анализ наличия связи с объектом управления, после чего выбирается один из режимов управления. Режим автоматического управления предполагает выбор предварительно сформированной программы из БД и ее последующий запуск на исполнение. Режим ручного управления осуществляется визуальными элементами управления пользовательского интерфейса. Алгоритм управления приведен на рисунке 4.
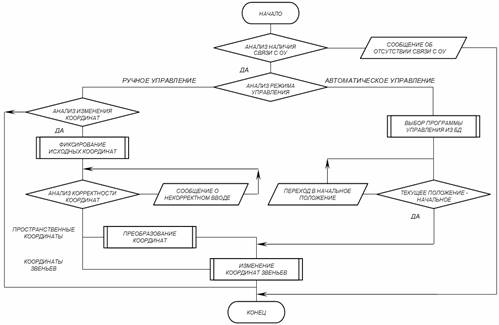
Рисунок 4 – Алгоритм управления роботом-манипулятором
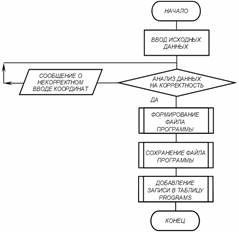
Алгоритм формирования программы автоматического управления предполагает ввода опорной траектории, которой будет придерживаться манипулятор. В процессе формирования программы можно осуществлять предварительный просмотр ее функционирования через окно визуализации приложения «Оператор». По окончанию ввода исходных данных формируется файл программы. Алгоритм формирования программы автоматического управления приведен на рисунке 5.
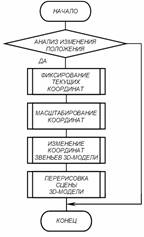
Алгоритм визуализации процесса управления производит сканирование объекта управления на факт изменения пространственного положения. Затем осуществляется преобразование координат звеньев, полученных с объекта, в координаты 3-х мерной модели. Окно визуализации обновляется. Данный алгоритм приведен на рисунке 6.
|
Рисунок 5 – Алгоритм формирования программы автоматического управления |
Рисунок 6 – Алгоритм визуализации процесса управления |
Заключение
Таким образом, была разработана и реализована автоматизированная система управления роботом-манипулятором PM-01 на базе программируемого логического контроллера CX9001 для учебного процесса в ВПИ филиал ВолгГТУ.
Литература
1. Денисенко В.В. Компьютерное управление технологическим процессом, экспериментом, оборудованием. / В.В. Денисенко; ред. Ю.Н. Чернышев. - М. : Горячая линия-Телеком, 2009. - 608 с.;
2. Фу К. Робототехника / К. Фу, Р. Гонсалес, К. Ли; пер. с англ. под ред. В.Г. Градецкого. - М. : Мир, 1989. - 624 с.;
3. Specifications PUMA-500 Series Industrial Robots, No 2-25, 1997.- 16 p.;
4. Hardware documentation for CX90x1 controller. - Version 2.4. - Beckhoff Automation GmbH., 2008. - 61 p.;
5. Automation Technology: TwinCAT ADS OCX. - Version 2.4. - Beckhoff Automation GmbH., 2004. - 170 p.

