Введение
Процесс окрашивания пассажирского самолета является технологически одним из наиболее сложных. Все дело в больших габаритах самолета, и необходимости в герметическом помещении с климат контролем.
При окрашивании самолетов большое значение уделяется свойствам красящих веществ. В частности, краска должна выполнять не только функцию декора, а и защитную. Краска должна иметь хорошие теплоизоляционные характеристики. Поскольку самолет летает на больших высотах, краска должна отражать воздействие прямых солнечных лучей, которые могут нанести самолету повреждения и изменить микроклимат в салоне.
Нанесение лакокрасочных материалов ручными краскораспылителями имеет много недостатков: производительность и качество окрашивания во многом определяются субъективными особенностями и квалификацией аппаратчика. Этих недостатков лишено автоматическое распыление лакокрасочных материалов с применением специальных промышленных роботов и манипуляторов.
Объектом исследования является промышленный окрасочный робот-манипулятор.
Предметом исследования является система управления окрасочного робота.
Актуальность работы заключается в необходимости разработки системы управления роботизированным комплексом окраски самолетов, которая обеспечит соблюдение параметров окраски с учетом изменения габаритных размеров детали, местоположения, окружающих климатических условий.
Основная часть
В процессе проектирования автоматизированного комплекса для покраски требуется особое внимание к детальному анализу и разработке каждого шага алгоритма оборудования. Необходимо учесть возможные неполадки и перебои в работе механизмов, выявление и устранение которых требует оперативного вмешательства обслуживающего персонала.
Разработаем дерево целей (рис. 1).

Рис. 1. Дерево целей
По происхождению система является искусственной технологической.
В группе искусственных систем при классификации по целям система относится к созидательной — производящей, т. к. главной целью системы является создание покрытия детали.
По признаку объективности существования система является материальной (материальные системы состоят из реальных объектов).
По степени связи с окружающей средой: открытой (обменивающиеся энергией, веществом и информацией с окружающей средой), т. к. предполагает взаимодействие с оператором.
По характеру развития система является стабильной. Стабильные системы — это системы, у которых структура и функции практически не изменяются в течение всего периода существования.
Проанализируем надсистему и подсистемы объекта (рисунок 2).
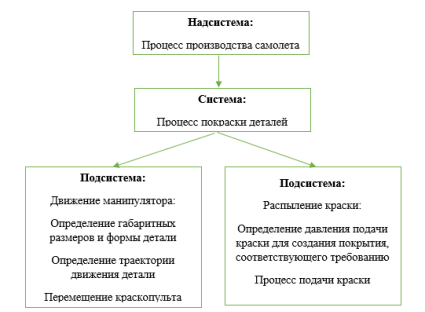
Рис. 2. Определение надсистемы и подсистем
Любая система, с одной стороны, может быть системой среди себе подобных, т. е. состоять из множества взаимосвязанных и взаимодействующих подсистем, состоящих из элементов, агрегатов, модулей, образующих единое целое, с другой стороны, может быть подсистемой некоторой более сложной системы (надсистемы) [1].
Для разработки системы управления роботом необходимо определить основные функциональные модули робота. Приведем обобщенную функциональную схему покрасочного робота (рисунок 3).
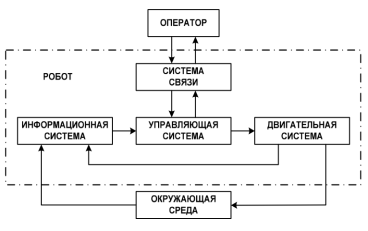
Рис. 3. Обобщенная функциональная схема покрасочного робота
Система связи — это совокупность вводно-выводных устройств, обеспечивающих обмен информацией между роботом и человеком (от человека — кнопки, клавиатура, переключатели; от робота — система оптических и звуковых сигнализаторов).
Информационная (сенсорная) система — совокупность искусственных органов чувств для восприятия и преобразования информации о состоянии окружающей среды и двигательной системы.
Управляющая (интеллектуальная) система — программируемое логическое устройство, предназначенное для формирования команд управления манипуляторами двигательной системы на основе анализа сигналов, поступающих от оператора и от информационной системы.
Двигательная система — комплекс исполнительных устройств (сервоприводов и манипуляторов) непосредственно воздействующих на окружающую среду.
Исследуемый объект является интеллектуальным роботом, способным полностью адаптироваться к условиям работы и производства, обладающим возможностью автоматического сбора и обработки информации. Управление осуществляется с помощью промышленных компьютеров с эвристической программой, где оператор программирует только конечную цель, а сами действия и их порядок определяет программа [2].
Так как рабочая зона покрасочного робота является объемной, то манипулятор должен иметь не менее трех переносных степеней подвижности.
Заключение
В данной работе определяется исследуемый объект — промышленный покрасочный робот, устанавливается актуальность разработки системы управления покрасочным роботом. Объект описывается как система: построено дерево целей, определены надсистема и подсистемы. Приводится описание конструкции промышленного робота-манипулятора, а также описание возможных систем управления промышленным роботом, рабочим органом которого является краскопульт.
Литература:
- Основы теории систем и системного анализа: учебное пособие / под ред. проф. Б. Г. Ильясова; [Б. Г. Ильясов и др.]; УГАТУ. — 2 изд-е, доп. — Уфа: РИК УГАТУ, 2017. — 292 с.
- Шахворостов С. А. Роботы в системах автоматизации: учебное пособие / С. А. Шахворостов. — Электрон. текстовые дан. — Красноярск: Научно-инновационный центр, 2016. — 110с.
- Структура и устройство промышленных роботов [Электронный ресурс]. URL: https://helpiks.org/8–71401.html — (Дата обращения: 21.09.2019).

