Все современные космические аппараты имеют в своем составе систему наведения антенн и систему поворота батареей солнечной. Различия между этими системами заключается в использовании различных двигателей и датчиков угла. Далее по тексту речь будет идти о системе поворота батареей солнечной, но всё сказанное применимо и для систем наведения антенн.
Систему поворота батареей солнечной в общем можно разделить на два конструктивно законченных блока: блок электронный и блок механический. Блоки электронные устройств поворота батареи солнечной имеют в своем составе микроконтроллеры с внутренним программным обеспечением. В связи с этим процесс испытаний приборов становится более трудозатратным и объемным. Для решения задачи качественной верификации разработанных приборов было создано специальное рабочее место автономной отладки приборов и блоков, имеющее в своем составе персональный компьютер с программным обеспечением, позволяющим испытателю проводить всестороннюю проверку прибора в максимально автоматическом режиме. Автоматизация рабочего места автономных электрических испытаний позволила минимизировать человеческий фактор в процессе испытаний и обработки информации, увеличить объёмы проверок и снизить временные ресурсы на проведение испытаний.
Ключевые слова: космический аппарат, бортовая аппаратура, испытание электронных приборов, радиоэлектронная аппаратура, система наведения антенн, программное обеспечение, устройство поворота батареи солнечной, электрические испытания
Современная радиоэлектронная аппаратура (РЭА) на базе микроконтроллеров требует специальных средств отладки. Создание РЭА осуществляется при постоянном взаимодействии разработчиков программного обеспечения (ПО) и разработчиков электрических схем, а автоматизированные рабочие места позволяют проводить работы по отладке РЭА оптимальным образом.
В настоящее время в Акционерном обществе «Информационные спутниковые системы» имени академика М. Ф. Решетнева» интенсивность проведения отработочных испытаний РЭА космических аппаратов при наземно-экспериментальной отработке (НЭО) очень высока. Необходимость увеличения эффективности отработки РЭА и сокращения сроков испытаний влечет за собой создание автоматизированных рабочих мест НЭО РЭА.
Блок электронный устройства поворота батареи солнечной. Разрабатываемые на предприятии блоки электронные устройств поворота батареи солнечной (БЭ УПБС), входящие в состав системы поворота батареей солнечной, проектируются индивидуально для каждого вида космического аппарата. БЭ УПБС управляется центральным приборным модулем (ЦПМ) по мультиплексному каналу обмена (МКО). БЭ УПБС по МКО принимает команды управления от ЦПМ, декодирует их и выдаёт управляющие воздействия блоку механическому устройства поворота батареей солнечной (БМ УПБС). Также БЭ УПБС принимает данные с БМ УПБС, обрабатывает их, кодирует и передаёт ЦПМ (рис. 1).

Рис. 1. Взаимодействие БЭ УПБС с другими подсистемами космического аппарата
Виды испытаний БЭ УПБС. Процесс испытаний РЭА на базе микроконтроллеров характеризуется определенными особенностями, связанными с разработкой программного продукта. В ходе верификации логики функционирования БЭ УПБС должна быть подтверждена правильность заложенных схемотехнических решений и их соответствие техническому заданию. Данный этап называется автономной отладкой БЭ УПБС и заключается в выявлении ошибок при проектировании, изготовлении, а также ошибок в программном обеспечении прибора. Автономная отработка включает в себя несколько видов испытаний:
– лабораторно-отработочные испытания (ЛОИ);
– конструкторско-доводочные испытаний (КДИ);
– предварительные испытания (ПрИ).
Структурная схема автономной отработки БЭ УПБС представлена на рис. 2.

Рис. 2 Структурная схема наземной экспериментальной отработки СНА
Объём и порядок проведения испытаний космического аппарата и его систем определяется государственными и отраслевыми нормативными документами с учётом тщательного анализа функционального назначения, требований к параметрам и характеристикам, условий эксплуатации, нештатных ситуаций, которые могут возникнуть на стадии эксплуатации. Объём испытаний зависит также от степени новизны.
Для проведения автономных испытаний было создано рабочее место автономной отладки БЭ УПБС (рис. 3).
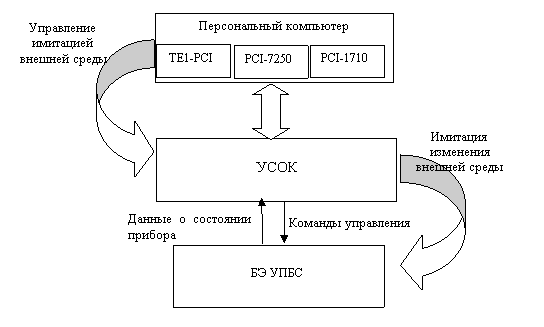
Рис. 3. Структура рабочего места автономной проверки БЭ УПБС
Рабочее место автономной отработки БЭ УПБС состоит из персонального компьютера (ПК), устройства сопряжения с объектом контроля (УСОК) и испытуемого БЭ УПБС. Для информационного обмена между ПК и УСОК используются плата TE1-PCI, поддерживающая протокол МКО, PCI-1710 и PCI-7250 с цифровым и аналоговым вводом-выводом.
УСОК позволяет имитировать изменение внешних условий прибора, таких как изменение температуры, тока, положения батареи солнечной и других.
Программное обеспечение является основным инструментом, который должен поддерживать единое информационно-логическое пространство между аппаратурой контроля и отрабатываемым прибором, обеспечивать полную верификацию всех логических функций прибора, а также проводить его автономную отработку в сжатые сроки с наименьшими трудозатратами.
Разработанное ПО, решающее задачи по автономной отработке БЭ УПБС, реализует следующие основные процедуры:
– прогон тестовых наборов;
– постоянный контроль состояния прибора;
– анализ полученных данных;
– формирование отчета об испытаниях;
– «ручное» управление прибором.
Тестовый набор представляет собой различные варианты проверок прибора. Варианты проверок зависят от отрабатываемого прибора. В автоматическом режиме проверяются:
– цифровые входы и выходы прибора,
– последовательность чередования, формируемых прибором, фаз двигателей,
– токи,
– температуры блоков прибора,
– адекватность приёма прибором команд управления,
– также проводятся проверки в соответствии с ГОСТ Р 52070–2003 для канала МКО.
Имитируются изменения аналоговых и сигнальных параметров, проводятся проверки потребляемой мощности, погрешности формирования управляющей частоты, измерения температуры, тока, преобразования угла поворота батареи солнечной.
Постоянный контроль состояния прибора и визуальное его отображение, позволяет зафиксировать кратковременные сбои, контролировать весь процесс отработки прибора, экстренно реагировать на аномальные ситуации и неадекватное поведение прибора. Все данные о состоянии прибора, проводимых действиях с прибором и выполняемых тестах, записываются автоматически с специальные файлы.
При проведении испытаний всегда приходится сталкиваться с большим объёмом выходной информации, которую необходимо анализировать. Для человека подобный анализ связан с долгой, требующей большого внимания, работой, в процессе которой могут возникнуть ошибки. Процедура анализа полученных во время проверок данных позволяет выявить ошибки в функционировании БЭ УПБС, а также отобразить оператору подробную информацию о приборе. Оператору отображаются все данные о приборе не в кодах, которые передаются между системами космического аппарата, а в физических величинах удобных для восприятия.
Отчёт об испытаниях формируется автоматически после завершения всех необходимых проверок. В нём отображаются данные о приборе, который испытывался, условия, в которых проводились проверки, результаты испытаний с пометками о нормальном и ненормальном выполнении тестирования, графики погрешностей измерения, данные об испытателе, проводившем работы. Отчёт формируется в формате Excel.
«Ручное» управление прибором подразумевает выдачу оператором определенной команды, закладки определённого набора данных, подготавливаемых оператором вне тестового набора. Такой режим позволяет производить исследование работы прибора, выявлять неисправности, проводить специальные виды проверок, которые необходимы только в данный момент времени.
Во время испытаний изменение режимов имитации внешней среды проводится под управлением программного обеспечения: ПО сообщает оператору о проведении необходимых операций. Такая организация работы была выбрана, так как рабочее место не позволяет производить все изменения в автоматическом режиме.
Таким образом, разработанное ПО полностью решает задачи автономных электрических испытаний БЭ УПБС и позволяет:
– автоматизировать процесс автономной отработки БЭ УПБС до 80 %, оставляя оператору только выполнение и анализ специальных проверок, либо проверок, в которых необходимо переключение режимов на УСОК для имитации изменения условий внешней среды;
– сократить время, затрачиваемое на отработку конкретного прибора или его блока, с нескольких недель до нескольких дней;
– проверить работоспособность прибора при возникновении нештатных ситуаций путём их моделирования;
– использовать рабочее место автономной отработки БЭ УПБС на любом этапе испытаний РЭА, а также других видов электронных блоков систем неведения антенн, таких как блоки управления антенными рефлекторами, блоки управления системы наведения антенн, блоки управления системы ориентации солнечной батареи.
С помощью данного программного обеспечения проведена автономная проверка блоков электронных и блоков управления систем наведения антенн космических аппаратов «Глонасс — М», «Глонасс — К», «Amos — 5», «Telkom — 3», «KazSat — 3», «Луч — 5», «Экспресс — АМ5», «Экспресс — АМ6», «Libyd», «Ямал — 401» и других. В ходе испытаний была подтверждена правильность построения программного обеспечения, а также подхода, связанного с созданием автоматизированных процедур.
Литература:
1 ГОСТ 16962–71. Изделия электронной техники и электротехники. Механические и климатические воздействия. Требования и методы испытаний. — М.: Изд-во стандартов, 1971. — 105с.
2 ГОСТ Р 52070–2003. Интерфейс магистральный последовательный системы электронных модулей. Общие требования. — М.: Изд-во стандартов, 2003. — 27с.
3 Лайза Криспин, Джанет Грегори. Гибкое тестирование: практическое руководство для тестировщиков ПО и гибких команд (Signature Series). — М.: Вильямс, 2010. — 464 с.
4 Гленфорд Майерс, Том Баджетт, Кори Сандлер. Искусство тестирования программ. — 3 изд. — М.: Вильямс, 2015. — 272 с.
5 Кудряшова Г. В. Общие вопросы автоматизации испытаний радиоэлектронной аппаратуры космических аппаратов // Инновационный арсенал молодежи. Труды Четвертой научно-технической конференции молодых ученых и специалистов ФГУП «КБ «Арсенал». — СПб.: Балтийский государственный технический университет «Военмех» (Санкт-Петербург), 2013. — С. 165–166.
6 Кудряшова Г. В. Автономная отработка электронных блоков бортовой аппаратуры космических аппаратов // Навигационные спутниковые системы, их роль и значение в жизни современного человека. Тезисы докладов Всероссийской научно-технической конференции, посвященной 40-летию запуска на орбиту навигационного КА «Космос-192" и 25-летию запуска первого КА «Глонасс» (10–14 октября 2007, г. Железногорск) гл. ред. Н. А. Тестоедов. — Красноярск: Сибирский гос. аэрокосмический ун-т им. акад. М. Ф. Решетнева, 2007. — С. 168–170.
7 Бьярне Страуструп. Программирование: принципы и практика с использованием C++. — 2 изд. — М.: Вильямс, 2015. — 1328 с.
8 Lisa Crispin, Tip House. Testing Extreme Programming. Addison-Wesley Professional, 2002. — 336 с.
9 Якобсон А., Буч Г., Рамбо Дж. Унифицированный процесс разработки программного обеспечения. — СПб.: Питер, 2002. — 496 с.
10 Кудряшова Г. В. Тест БЭ УПБС. Свидетельство о государственной регистрации программы для ЭВМ № 2010614025, заявл.01.02.2010, зарег. 22.06.2010

