Рассматриваются варианты построения программного обеспечения и выбор оптимального. Описано взаимодействие составных частей и возможности программного обеспечения. Описан разработанный протокол обмена программы рабочего места и специального программного обеспечения центрально-процессорного модуля.
Ключевые слова: блок управления, центрально-процессорный модуль, интерфейсный модуль сопряжения, автономная отработка.
Variants of construction software and a choice of the optimum are considered. Software interaction components and capabilities of the software is described. The developed report of an exchange of the program of a workplace and the special software of the central-processor module is described.
Keywords: management block, central-processor module, interfacing of the management block, independent working off.
В настоящее время в ОАО «ИСС» им. академика М.Ф. Решетнева» интенсивность графиков изготовления РЭА современных космических аппаратов для проведения отработочных испытаний в объёме наземно-экспериментальной отработки и комплектации штатных изделий исключительно высока. Необходимость увеличивать эффективность отработки РЭА и сокращать ее сроки для вновь создаваемых изделий, влечет за собой создание унифицированных и автоматизированных рабочих мест наземно-экспериментальной отработки РЭА.
Разрабатываемые блоки управления бортового комплекса управления (БУ БКУ) современных и перспективных космических аппаратов предприятия проектируются по модульному принципу и состоят из центрально-процессорного модуля (ЦПМ), который позволяет реализовать все логические функции конкретной аппаратуры не аппаратными, а программными средствами, и интерфейсных модулей сопряжения (ИМС или подсистем), осуществляющих управления системами КА, подключаемых к ЦПМ по последовательному периферийному интерфейсу (ППИ). Управление БУ осуществляется бортовым интегрированным вычислительным комплексом (БИВК) по мультиплексному каналу обмена (МКО) (ГОСТ Р 52070-2003). ЦПМ принимает команды управления по МКО от БИВК, декодирует их, и выдает слова данных (СД), содержащие команды управления (КУ), в соответствующие подсистемы БУ (ИМС). Так же БИВК считывает СД от ЦПМ, содержащие телеметрическую информацию.
Сейчас срок активного существования космических аппаратов составляет 10-15 лет, и для его обеспечения, как одной из задач, является верификация логики функционирования бортовой РЭА, одним из этапов которой является верификация логики функционирования ИМС, ее составляющих. В ходе проведения этого этапа должны быть подтверждены заложенные схемные и технические решения на соответствие техническому заданию (ТЗ). Данный этап называется лабораторно-отработочные испытания ИМС и заключается в выявлении ошибок при их проектировании, изготовлении, а так же ошибок в проектах ПЛИС ИМС.
Для реализации этого этапа в отделе проектирования и разработки бортовой РЭА было создано рабочее место (РМ) автономной отработки ИМС, на базе лабораторного отработочного комплекса [1]. В ходе проведения автономной отработки ИМС должны быть решены следующие задачи:
· Полная проверка функционирования, как отдельных блоков ИМС, так и всего ИМС, состоящей из нескольких блоков;
· Проверка устойчивости функционирования ИМС при аномальных ситуациях;
· Выявление ошибок в функционировании ИМС.
Рабочее место автономной отработки ИМС приведено на рисунке 1.
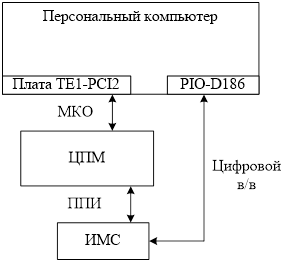
Рис. 1. Рабочее место автономной отработки ИМС
Рабочее место автономной отработки ИМС состоит из персонального компьютера (ПК), ЦПМ и подключаемых ИМС. Для информационного обмена ПК и ЦПМ используется плата TE1-PCI2 поддерживающая протокол МКО. Для связи ПК и ИМС используется плата PIO‑D186.
Построенное по такому принципу рабочее место создает определенные трудности при разработке программного обеспечения автономной отработки ИМС, т.к. нет возможности прямого воздействия с ПК на ИМС.
Первый вариант построения ПО заключается в написании отдельных программ-тестов зашиваемых в ЦПМ и запускаемых оператором с помощью программы на ПК. В данном варианте построения ПО можно выявить ряд недостатков:
· необходимо разрабатывать большое количество программ-тестов, зашиваемых в ЦПМ, для проверки каждого ИМС, что влечет за собой значительный объем работ и затрату большого количества времени на разработку и написание программ-тестов;
· для перехода от одного теста к другому необходимо каждый раз перепрашивать ЦПМ, записывая в него новую программу-тест, что опять же отнимает значительное время;
· локальное изменение программы-теста в ЦПМ не возможно, следовательно, для изменения каких либо параметров, необходимо перепрашивать ЦПМ программой-тестом с измененными параметрами;
· для перепрошивки ЦПМ, новой программой-тестом, необходимо привлекать человека умеющего это делать, либо обучать оператора, который осуществляет проверку.
Недостатки первого подхода к построению ПО, не предоставляют возможность проводить автономную отработку ИМС с минимальными трудозатратами и в кротчайшие сроки.
Второй вариант построения ПО заключается в написании единой программы для ЦПМ, управление которой должно осуществляться с компьютера, т.е. тесты задаются непосредственно на компьютере, а затем пересылаются в ЦПМ по каналу МКО, где и происходит их выполнение.
Второй подход позволяет избавиться от недостатков первого подхода, но для его реализации необходим специальный протокол обмена между ПК и ЦПМ.
В ходе анализа протоколов МКО и ППИ было выявлено, что можно встроить протокол ППИ в МКО, т.е. передавать посылки формата ППИ в информационных словах данных протокола МКО, но с одним ограничением: количество передаваемых слов данных по МКО равно 32 (из них 30 информационных), а по протоколу ППИ не оговорено, т.е. может быть и больше. Проанализировав количество СД в посылках для различных подсистем, было выявлено, что количество СД не превышает 22 за один обмен, а следовательно, данным ограничением можно пренебречь.
Таким образом, для реализации ПО, был выбран второй вариант. В результате чего было создано программное обеспечение позволяющее решать поставленные задачи в ходе автономной отработки ИМС, а так же обладающее рядом особенностей:
· отрабатывать несколько ИМС, соединенных между собой по межблочным разъемам и подключенных к ЦПМ;
· отрабатывать БУ в сборе, с использованием в качестве соединения ИМС – штатные кабели.
Разработанное ПО можно разделить на 2е части:
· Основное ПО – является управляющим, т.е. задает управляющие воздействия и считывает СД на входах ИМС;
· Дополнительное ПО – контролирует состояние регистров ИМС и позволяет записывать /считывать СД на выходах ИМС.
Состав основного ПО:
· программа «Рабочее место проверки ИМС», разработанная на языке Borland C++ Builder 6.0 и устанавливаемая на персональном компьютере;
· специальное программное обеспечение (СПО), зашиваемое в ЦПМ, выполнено в технологической среде разработки программного обеспечения ЦПМ, поставляемой ФГУП НИИ «Субмикрон» и полностью поддерживает разработанный протокол.
Для обеспечения информационного взаимодействия этих программ был разработан протокол, основанный на протоколе обмена по МКО. Особенностью разработанного протокола является то, что разработчик, проверяющий ИМС, передает с компьютера в ЦПМ сообщения, составленные в соответствии с протоколом ППИ, и дополнительную информацию обмена. Приняв полученные сообщения, ЦПМ, выдает их в ИМС, согласно дополнительной информации. Данная технология делает протокол МКО «прозрачным» и позволяет формировать сообщения по ППИ на компьютере. Благодаря данной технологии нет необходимости корректировать СПО, достаточно зашить его в ЦПМ один раз и можно использовать для проверки любых ИМС различных изделий.
Состав дополнительного ПО:
· набор программ, разработанных на языке Borland C++ Builder 6.0, специально для конкретного ИМС в соответствии с его исходными данными. Каждая программа предназначена для регистрации состояния внутренних регистров и задания значений выходных регистров конкретного ИМС.
Основной принцип работы разработанного ПО автономной проверки ИМС заключается в следующем: оператор задает на персональном компьютере набор пакетов в программе «РМ проверки ИМС», каждый из которых состоит из сообщения в формате ППИ и дополнительной информации, необходимой для обмена. В свою очередь программа «РМ проверки ИМС» формирует из каждого пакета – сообщение по МКО, в соответствии с разработанным протоколом. После задания пакетов оператор запускает обмен. Заданные сообщения передаются от ПК, с помощью платы TE1-PCI2, в ЦПМ по каналу МКО. ЦПМ, принимая каждое сообщение по МКО, декодирует его, согласно разработанному протоколу, и передает сообщение по ППИ на входы ИМС, согласно дополнительной информации находящейся в полученном сообщении МКО. Если в полученном сообщении указан тип обмена – «чтение СД», то ЦПМ считывает СД с входов ИМС. Эти СД содержат информацию формируемую в самом ИМС и на его выходах. Формирование внутренних данных в ИМС контролируют специальные дополнительные программы, написанные для конкретного ИМС, с помощью платы PIO-D186. Данные программы контролируют состояния выходов ИМС, отображая на экране полученные данные, а так же предоставляют возможность задавать состояния регистров на выходах ИМС, для их последующего считывания ЦПМ.
Общие особенности разработанного ПО:
· Единая оболочка – позволяет разработчику ИМС, проводить автономную отработку ИМС через единую оболочку (программу «РМ проверки ИМС»), путем задания различных тестов;
· Прозрачность протокола МКО – разработанный протокол позволяет обойти протокол МКО, задавая на компьютере сообщения в формате ППИ с дополнительной информацией.
· Простота в использовании – единая оболочка и интуитивно понятный интерфейс позволяют разработчикам ИМС, создавать пакеты тестов, проводить проверку и анализировать полученную информацию, без чьей либо помощи.
Единая оболочка отработки ИМС обладает рядом функциональных возможностей, которые в своей совокупности являются мощным средством обеспечения гибкой, надежной, и достоверной отработки ИМС.
Функциональные особенности единой оболочки для автономной отработки ИМС:
· Генерация набора пакетов – предоставляет оператору средства для автоматического формирования цепочки пакетов на основании заданных параметров, соответствующих конкретному ИМС;
· Предварительный анализ набора пакетов – программа анализирует составленную цепочку пакетов на предмет ее полноты и правильности составления, и в случае невыполнения этих условий выдает соответствующие предупреждения, исключая тем самым возможные ошибки вносимые оператором, при корректировки цепочки пакетов;
· Автоматический режим – позволяет запускать заданную цепочку пакетов с автоматическим изменением данных на каждом цикле выполнения, заданной цепочки пакетов; объем изменяемых данных задается предварительно оператором;
· Анализ протокола – программа производит анализ протокола обмена, выявляя ошибки в функционировании ИМС, на основании полученных данных, и отображает оператору подробную информацию по выявленным отрицательным результатам;
· Имитация не штатных ситуаций – позволяет проверить работоспособность ИМС при неполноте или недостоверности передаваемой в него информации.
Таким образом, разработанное ПО полностью решает поставленные задачи автономной отработки ИМС, а так же благодаря своим особенностям, позволяет:
· проверять работоспособность ИМС при возникновении не штатных ситуаций, путем их моделирования;
· автономно отрабатывать каждый комплект ИМС (основной/резервный) подключаемый к каждому комплекту ЦПМ (основной/резервный);
· проводить автономную отработку БУ в сборе.
В настоящее время с помощью данного программного обеспечения проведена автономная отработка ИМС блоков управления космических аппаратов «Муссон», «Глонасс-К», а так же оно используется при отработки КА «Луч-5», «Амос-5». В ходе проведения испытаний была подтверждена правильность выбранного подхода к построению программного обеспечения, таким образом разработанное ПО доказало свою надежность, универсальность и простоту в использовании, благодаря чему оно применимо для отработки последующих ИМС блока управления перспективных КА.
Дальнейшим развитием данного программного обеспечения может быть интеграция дополнительных программ в основную, для более удобного оперирования с данными на уровне единой программной оболочки.
Литература:
1. ГОСТ Р 52070-2003. Интерфейс магистральный последовательный. Системы электронных модулей.
2. Пичкалев А. В. Испытания радиоэлектронной аппаратуры на лабораторном отработочном комплексе / А. В. Пичкалев // Решетневские чтения: материалы XII Междунар. науч. конф.; Сиб. гос. аэрокосмич. ун-т. Красноярск, 2008.

