Электромеханические устройства раскрытия и сдерживания штанг крупногабаритных антенн и солнечных батарей предназначены для раскрытия солнечных батарей в спутнике, стабилизируя скорость раскрытия. Известны приборы с аналогичными функциями, основанный на электродвигателе коллекторного типа. Электродвигатель коллекторного типа имеет очень ограниченный ресурс при работе в условиях космического пространства, вакуума. Разработанные устройства содержат двигатели бесколлекторного типа обеспечивающие увеличение ресурса работы в условиях космического пространства.
Разработанное электромеханические устройства раскрытия и сдерживания штанг крупногабаритных антенн и солнечных батарей имеют автоматическую систему управления ограничивающую максимальный момент, развиваемый двигателем. Что обеспечивает минимальные затраты энергии в совокупности с обеспечением заданных параметров на всех режимах работы привода.
В целях повышения надёжности устройств, блок электроники имеет два канала управления двигателем. Основной канал анализирует свою работоспособность и при выявлении неисправности (выход из строя выходных транзисторов, датчиков положения ротора), передает управление резервному каналу. Резервный канал так же анализирует работоспособность основного канала, и при обнаружении признаков неработоспособности (отказ ВИП, пробой предохранителя), перехватывает работу на себя.
Устройства имеют хорошие удельные характеристики, обеспечивают стабильную скорость вращения выходного вала (+-5 %), и развиваемый момент, во всём диапазоне рабочих температур и напряжения питания. Точность поддержания заданных характеристик достигается с помощью разработанных алгоритмов управления, на платформе микроконтроллера 1886ВЕ2У. Алгоритмы управления включают: ПИД регулятор по скорости, контроль тока, систему ограничения максимального момента, мониторинг работоспособности и метод переключения между каналами с отключением статора двигателя от неисправного канала управления.
В программе управления электродвигателем применён алгоритм сглаживания. Так как если ПИД-регулятор принимает отрицательное значение изменятся алгоритм включения обмоток двигателя на реверсивное, соответственно изменяется знак развиваемого двигателем момента. Как видно из Рис. 1 при изменении алгоритма включения обмоток на реверсивное имеется достаточно большой скачёк создаваемого момента при переходе через нуль.
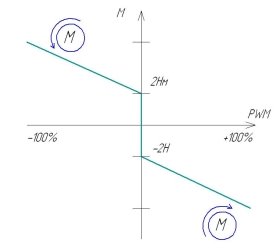
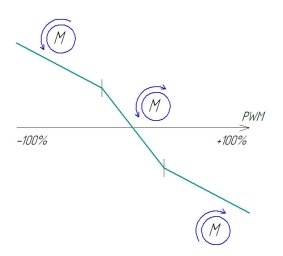
Рис. 1 Рис. 2
Для обеспечения линейной характеристики управления, во время переходного процесса, применяется алгоритм сглаживания. Вместо моментальной смены направления протекания тока в обмотках, замыкаем обмотки между собой через плавно уменьшающееся сопротивление, тем самым привод работает в режиме пассивного демпфирования. После полного замыкания обмоток, для дальнейшего увеличения момента сопротивления, изменяем алгоритм включения обмоток на реверсивный. Как видно из Рис. 2 характеристика принимает практически линейный вид.
В совокупности всех составляющих мы видим надёжные, экономичные, высокотехнологичные и соответствующие поставленной задаче устройства, имеющие достаточный ресурс и способные работать в сложных условиях эксплуатации.
Литература:
- Об эволюционных алгоритмах решения сложных задач оптимизации / А. В. Гуменникова, Емельянова М. Н., Семенкин Е. С. и др. // Вестник СибГАУ. 2003. № 4 (10). С. 14–23.
- Electronic textbook StatSoft [Электронный ресурс]. URL: http://www.fmi.uni-sofia.bg/fmi/statist/education/textbook/eng/glosa.html.
- Levendel Y. Reliability analysis of large software systems: Defect data modeling // IEEE Trans. Software Engineering, 1990. Vol. 16. P. 141–152.
- Ковалев И. В. Система мультиверсионного формирования программного обеспечения управления космическими аппаратами: дис. … д-ра техн. наук. Красноярск: КГТУ, 1997. 228 с.
- Титов Г. П. Выбор приборного состава системы определения геометрии крупногабаритной трансформируемой антенны // Решетневские чтения: материалы XV Междунар. науч. конф. (10–12 ноября 2011, г. Красноярск): в 2 ч. / под общ. ред. Ю. Ю. Логинова; Сиб. гос. аэрокосмич. ун-т. Красноярск, 2011. С. 98–99.

