Математическая модель САР скорости системы «АИН ШИМ-ЛАД» (Z1=12) свекторным управлением
Емельянов Александр Александрович, доцент;
Бесклеткин Виктор Викторович, ассистент;
Прокопьев Константин Васильевич, студент;
Авдеев Александр Сергеевич, студент;
Габзалилов Эльвир Фиргатович, студент;
Киряков Георгий Анатольевич, студент;
Аюпов Вадим Илхамович, студент;
Королев Олег Александрович, студент;
Федоров Александр Павлович, студент
Российский государственный профессионально-педагогический университет
Главной целью данной работы является использование идеи векторного управления для линейного асинхронного двигателя в доступной для понимания студентами форме. Поэтому, вначале рассмотрим главный канал системы без обратных связей (рис. 1). Целесообразно выделить 10 уровней, так как в некоторых из них имеются повторяющиеся элементы с одинаковой структурой программ.
Программирование каждого уровня с одним или множеством элементов производим в Script таким образом, чтобы каждые последующие продукты программ включали предыдущие. В этом случае мы увидим процесс влияния элементов предыдущих уровней на результаты последующих. Только имея представление о роли каждого элемента в главном канале можно переходить к завершающей стадии – введению обратных связей. В основу данной работы положены математические модели линейного асинхронного двигателя, рассмотренные в работах [1] и [2].
Из многочисленных публикаций по векторному управлению, на наш взгляд, необходимо отметить работы [3], [4], [5].
Элементы системы управления (ЗИ, фильтры, регуляторы) «привязаны» к вращающейся системе координат, а математическая модель линейного асинхронного двигателя к неподвижной трехфазной системе индуктора, поэтому здесь необходимо обеспечить двухэтапное преобразование напряжений:
− ux, uy → uα, uβ – из вращающейся системы, связанной с циклической частотой питающего напряжения к неподвижной декартовой системе α, β;
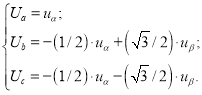
− uα, uβ → Ua, Ub, Uc – из неподвижной системы α, β переход к трехфазной a, b, c.
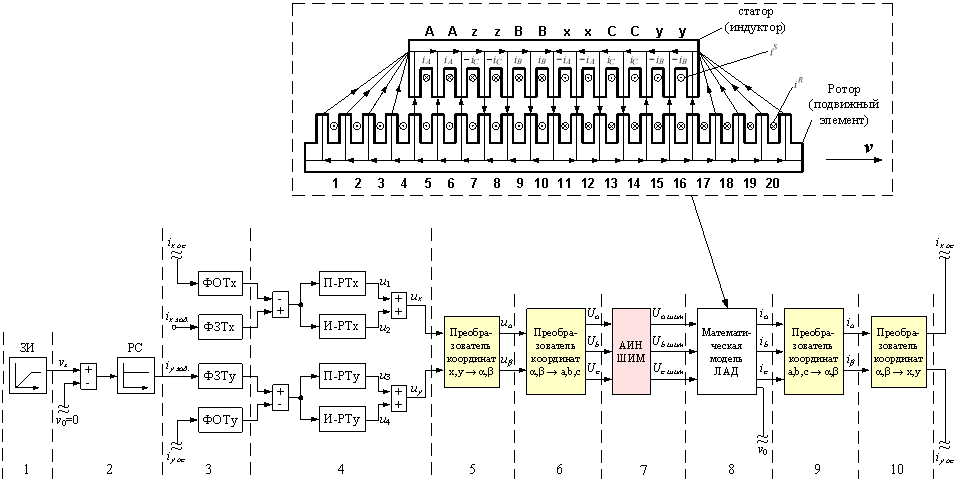 Рис. 1. Главный канал разомкнутой системы
Рис. 1. Главный канал разомкнутой системы
Далее токи ia,b,c линейного асинхронного двигателя проходят также двухэтапное преобразование: ia,b,c → iα,β и далее iα,β → ixoc,yoc. Сигналы ixoc, iyoc далее в замкнутой системе уже можно подать на сравнивающие устройства с сигналами задания.
Циклическая частота вращения системы координат равна циклической частоте подаваемого напряжения на двигатель, т.е. ωк = ωs. Связь циклической частоты ωк = ωs с линейной скоростью поля ![]() .
.
Поэтому наиболее перспективным представляется рассмотрение следующей схемы: все процессы в отношении к циклической частоте ωк = ωs, в том числе задатчик интенсивности, задавать не в системе vs = f(t), а в системе ωк = ωs = f(t), но тогда линейную скорость подвижной части необходимо преобразовать в ω = f(v0). На выходе математической модели ЛАД необходимо установить преобразователь линейной скорости в циклическую ω = ωs∙(1-s), где ![]() .
.
Тогда все регуляторы рассчитываются по классическим формулам для векторных систем с АД [3], [4], [5]. Причем за базовую принимаются паспортные данные асинхронного двигателя с близкими по характеристикам к ЛАД (rs, rr, Ls, Lr) и по ним определяются постоянные времени Тэ и Тr, лежащие в основе определения коэффициентов в регуляторах скорости и тока, и далее производится их корректировка с учетом тормозных моментов от продольного краевого эффекта. В соответствии с исследованиями, например [6], можно предположить, что в многополюсных ЛАД такой корректировки не понадобится. По-видимому, в дальнейшем встанет задача компенсации краевого эффекта на уровне систем управления. Причем компенсация возможна как на уровне вращающейся системы координат (x, y), так и в неподвижной системе a, b, c.
Условимся, что если преобразование из неподвижной системы статора (индуктора) с переменными a, b, c идет в направлении системы координат с переменными α, β и далее во вращающуюся систему с переменными x, y, то будем называть это прямым преобразованием, т.е.
a, b, c → α, β → x, y – прямое преобразование,
тогда
x, y → α, β → a, b, c – обратное преобразование.
По данной схеме преобразования все сигналы с задатчика интенсивности (ЗИ), фильтров (ФЗТ, ФОТ), регуляторов (П, И) идут во вращающейся системе координат, а математическая модель линейного асинхронного двигателя (ЛАД) сделана в неподвижной системе координат (a, b, c), поэтому необходимо произвести двухэтапное преобразование сигналов.
Уровень 1. На этом уровне расположен задатчик интенсивности ЗИ. Он задает линейную синхронную скорость поля:
![]() ,
,
гдеτ – полюсное деление линейного асинхронного двигателя (рассмотрим двухполюсную машину);
fc – частота питающего напряжения нарастающего по линейному закону до времени tk, затем остающегося постоянным до конца времени переходного процесса.
% Программирование задатчика интенсивности Matlab-Script
|
dt=0.00001; tz=9.769*10^-3; |
q=2; tau=3*tz*q; |
tk=0.4; |
K=input('Длительность цикла k=');
for k=1:(K+1)
if ((k*dt >= 0) && (k*dt <= tk))
fc=k*dt*50/tk;
end;
if (k*dt > tk)
fc=50;
end;
vs=2*tau*fc;
mass_t(k)=k*dt;
mass_vs(k)=vs;
end;
% Построение графиков
figure(1);
plot(mass_t,mass_vs);
grid on;
Результат первого уровня приведен на рис. 2.
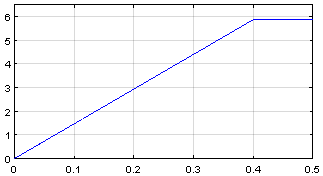
Рис. 2. Сигнал задатчика интенсивности
Уровень 2. Сигнал задания vs поступает на регулятор скорости, на выходе которого получаем сигнал задания по проекции yisy задания. Регулятор скорости принимаем пропорциональным.
Уровень 3. Фильтры в цепи заданий и обратных связей по проекциям имеют одинаковую структуру, поэтому дадим общий вывод.
Пусть задана передаточная функция фильтра с постоянной Tμ в Simulink (рис. 3):
Рис. 3. Передаточная функция фильтра
Переведем это выражение в Script:
![]() .
.
Перейдем от изображения к оригиналу:
![]() ;
;
![]() .
.
Решаем дифференциальные уравнения методом конечных разностей Эйлера:
![]() .
.
Конкретно к проекциям x и y:
![]() ;
;
![]() .
.
Уровень 4. Пропорциональные и интегральные части регуляторов тока по проекциям одинаковы.
Пропорциональная часть KIx = KIy.
Интегральная часть:
− Проведем переход из Simulink в Script (рис. 4):
Рис. 4. Передаточная функция интегральной части регулятора тока
![]()
− Переходим к оригиналу:
![]()
− Выражаем через конечные разности:
![]() ;
;
![]() ;
;
![]() ;
;
![]() ;
;
![]() ;
;
![]() ;
;
![]() ;
;
![]() ;
;
![]() .
.
Математическое моделирование ux и uy производится в Script. Результаты расчета даны на рис. 5.
% Программирование ux, uy в Matlab-Script
|
dt=0.00001; tz=9.769*10^-3; q=2; tau=3*tz*q; |
tk=0.4; kc=4; Tm=0.005; ixzad(1)=0; |
iyzad(1)=0; u2(1)=0; u4(1)=0; ixb=6; |
Ki=8; Ti=2400; |
K=input('Длительность цикла k=');
for k=1:(K+1)
if ((k*dt >= 0) && (k*dt <= tk))
fc=k*dt*50/tk;
end;
if (k*dt > tk)
fc=50;
end;
vs=2*tau*fc;
vsum=vs;
iyb=vsum*kc;
ixzad(k+1)=ixzad(k)+(ixb-ixzad(k))*dt/Tm; %Фильтр ФЗТ x
iyzad(k+1)=iyzad(k)+(iyb-iyzad(k))*dt/Tm; %Фильтр ФЗТ y
ixsum(k+1)=ixzad(k+1);
iysum(k+1)=iyzad(k+1);
u1(k+1)=ixsum(k+1)*Ki; %Пропорциональная часть x
u2(k+1)=u2(k)+ixsum(k+1)*dt/Ti; %Интегральная часть x
ux=u1(k+1)+u2(k+1);
u3(k+1)=iysum(k+1)*Ki; %Пропорциональная часть y
u4(k+1)=u4(k)+iysum(k+1)*dt/Ti; %Интегральная часть y
uy=u3(k+1)+u4(k+1);
mass_t(k)=k*dt;
mass_ux(k)=ux;
mass_uy(k)=uy;
end;
% Построение графиков
figure(2);
plot(mass_t,mass_ux,'b',mass_t,mass_uy,'r');
grid on;
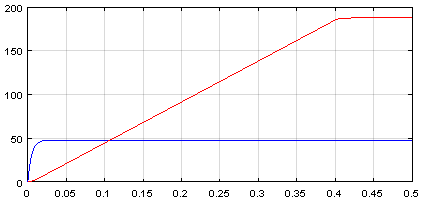
Рис. 5. Напряжения ux, uy на выходе регуляторов тока
Уровень 5. На этом уровне необходимо произвести математическое моделирование по обратному преобразованию из вращающейся системы x, y в неподвижную α, β. В соответствии с [3]:
где ![]() определяется по следующим зависимостям:
определяется по следующим зависимостям:
![]() – угловая скорость вращения системы координат;
– угловая скорость вращения системы координат;
![]() – угол поворота.
– угол поворота.
В конечных разностях Эйлера:
![]() или
или ![]() .
.
% Программирование ualfa, ubeta в Matlab-Script
|
dt=0.00001; tz=9.769*10^-3; q=2; tau=3*tz*q; |
tk=0.4; kc=4; Tm=0.005; ixzad(1)=0; |
iyzad(1)=0; Ki=8; Ti=2400; u2(1)=0; |
u4(1)=0; ixb=6; teta(1)=0; |
K=input('Длительность цикла k=');
for k=1:(K+1)
if ((k*dt >= 0) && (k*dt <= tk))
fc=k*dt*50/tk;
end;
if (k*dt > tk)
fc=50;
end;
vs=2*tau*fc;
vsum=vs;
iyb=vsum*kc;
wk=vs*pi/tau;
teta(k+1)=teta(k)+wk*dt;
ixzad(k+1)=ixzad(k)+(ixb-ixzad(k))*dt/Tm; %Фильтр ФЗТ x
iyzad(k+1)=iyzad(k)+(iyb-iyzad(k))*dt/Tm; %Фильтр ФЗТ y
ixsum(k+1)=ixzad(k+1);
iysum(k+1)=iyzad(k+1);
u1(k+1)=ixsum(k+1)*Ki; %Пропорциональная часть x
u2(k+1)=u2(k)+ixsum(k+1)*dt/Ti; %Интегральная часть x
ux=u1(k+1)+u2(k+1);
u3(k+1)=iysum(k+1)*Ki; %Пропорциональная часть y
u4(k+1)=u4(k)+iysum(k+1)*dt/Ti; %Интегральная часть y
uy=u3(k+1)+u4(k+1);
rox=cos(teta(k+1));
roy=sin(teta(k+1));
% 1 ступень обратного преобразования x,y -> alfa,beta
usalfa=rox*ux-roy*uy;
usbeta=roy*ux+rox*uy;
mass_t(k)=k*dt;
mass_usalfa(k)=usalfa;
mass_usbeta(k)=usbeta;
end;
% Построение графиков
figure(3);
plot(mass_t,mass_usalfa,'b',mass_t,mass_usbeta,'r');
grid on;
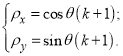
Результаты пятого уровня представлены на рис. 6.
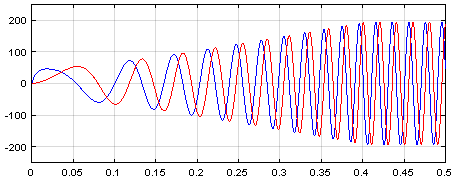
Рис. 6. Напряжения uα, uβ на выходе преобразователя координат (x, y → α, β)
Уровень 6. На этом уровне необходимо преобразовать сигналы uα, uβ в трехфазную систему Ua, Ub и Uc, непосредственно подаваемых в математическую модель АИН ШИМ.
Уравнения преобразования, в соответствии с [3], имеют следующий вид:
% Программирование Ua, Ub, Uc в Matlab-Script
|
dt=0.00001; tz=9.769*10^-3; q=2; tau=3*tz*q; |
tk=0.4; kc=4; Tm=0.005; ixzad(1)=0; |
iyzad(1)=0; Ki=8; Ti=2400; u2(1)=0; |
u4(1)=0; ixb=6; teta(1)=0; |
K=input('Длительность цикла k=');
for k=1:(K+1)
if ((k*dt >= 0) && (k*dt <= tk))
fc=k*dt*50/tk;
end;
if (k*dt > tk)
fc=50;
end;
vs=2*tau*fc;
vsum=vs;
iyb=vsum*kc;
wk=vs*pi/tau;
teta(k+1)=teta(k)+wk*dt;
ixzad(k+1)=ixzad(k)+(ixb-ixzad(k))*dt/Tm; %Фильтр ФЗТ x
iyzad(k+1)=iyzad(k)+(iyb-iyzad(k))*dt/Tm; %Фильтр ФЗТ y
ixsum(k+1)=ixzad(k+1);
iysum(k+1)=iyzad(k+1);
u1(k+1)=ixsum(k+1)*Ki; %Пропорциональная часть x
u2(k+1)=u2(k)+ixsum(k+1)*dt/Ti; %Интегральная часть x
ux=u1(k+1)+u2(k+1);
u3(k+1)=iysum(k+1)*Ki; %Пропорциональная часть y
u4(k+1)=u4(k)+iysum(k+1)*dt/Ti; %Интегральная часть y
uy=u3(k+1)+u4(k+1);
rox=cos(teta(k+1));
roy=sin(teta(k+1));
% 1 ступень обратного преобразования x,y -> alfa,beta
usalfa=rox*ux-roy*uy;
usbeta=roy*ux+rox*uy;
% 2 ступень обратного преобразования alfa,beta -> a,b,c
Ua=usalfa;
Ub=-(1/2)*usalfa+(sqrt(3)/2)*usbeta;
Uc=-(1/2)*usalfa-(sqrt(3)/2)*usbeta;
mass_t(k)=k*dt;
mass_Ua(k)=Ua;
mass_Ub(k)=Ub;
mass_Uc(k)=Uc;
end;
% Построение графиков
figure(4);
plot(mass_t,mass_Ua,'b',mass_t,mass_Ub,'r',mass_t,mass_Uc,'g');
grid on;
Результаты шестого уровня представлены на рис. 7.
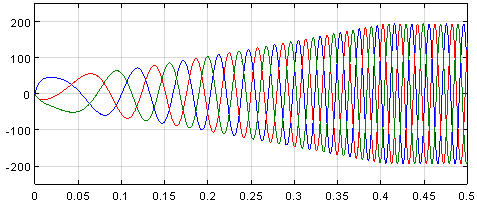
Рис. 7. Напряжения Ua, Ub, Uc на выходе преобразователя координат (α, β → a, b, c)
Уровень 7. Математическая модель инвертора напряжения с широтно-импульсной модуляцией в Script приведена ниже.
% Программирование Uashim, Ubshim, Ucshim в Matlab-Script
|
dt=0.00001; tz=9.769*10^-3; q=2; tau=3*tz*q; tk=0.4; kc=4; |
Tm=0.005; ixzad(1)=0; iyzad(1)=0; Ki=8; Ti=2400; |
u2(1)=0; u4(1)=0; ixb=6; teta(1)=0; kinv=950; |
tau1=0; time=0; u0p(1)=1; pwm=-1; f_triangle=1000; |
K=input('Длительность цикла k=');
for k=1:(K+1)
if ((k*dt >= 0) && (k*dt <= tk))
fc=k*dt*50/tk;
end;
if (k*dt > tk)
fc=50;
end;
vs=2*tau*fc;
vsum=vs;
iyb=vsum*kc;
wk=vs*pi/tau;
teta(k+1)=teta(k)+wk*dt;
ixzad(k+1)=ixzad(k)+(ixb-ixzad(k))*dt/Tm; %Фильтр ФЗТ x
iyzad(k+1)=iyzad(k)+(iyb-iyzad(k))*dt/Tm; %Фильтр ФЗТ y
ixsum(k+1)=ixzad(k+1);
iysum(k+1)=iyzad(k+1);
u1(k+1)=ixsum(k+1)*Ki; %Пропорциональная часть x
u2(k+1)=u2(k)+ixsum(k+1)*dt/Ti; %Интегральная часть x
ux=u1(k+1)+u2(k+1);
u3(k+1)=iysum(k+1)*Ki; %Пропорциональная часть y
u4(k+1)=u4(k)+iysum(k+1)*dt/Ti; %Интегральная часть y
uy=u3(k+1)+u4(k+1);
rox=cos(teta(k+1));
roy=sin(teta(k+1));
% 1 ступень обратного преобразования x,y -> alfa,beta
usalfa=rox*ux-roy*uy;
usbeta=roy*ux+rox*uy;
% 2 ступень обратного преобразования alfa,beta -> a,b,c
Ua(k+1)=usalfa;
Ub(k+1)=-(1/2)*usalfa+(sqrt(3)/2)*usbeta;
Uc(k+1)=-(1/2)*usalfa-(sqrt(3)/2)*usbeta;
% Система АИН ШИМ
if ((k*dt >= 0) && (k*dt <= 0.1))
U0=k*dt*abs(sqrt((usalfa^2)+(usbeta^2)))/0.1;
end;
if (k*dt > 0.1)
U0=abs(sqrt((usalfa^2)+(usbeta^2)));
end;
tau1(k+1)=tau1(k)+dt*f_triangle;
time(k+1)=time(k)+dt;
if tau1(k+1)>=1
tau1(k+1)=tau1(k+1)-1;
end;
if (tau1(k+1)>=0) && (tau1(k+1)<0.5)
f1(k)=1-4*tau1(k+1);
else
f1(k)=4*tau1(k+1)-3;
end;
u0p(k+1)=U0*f1(k);
if (Ua(k+1)>=u0p(k+1))
pwm(k+1)=1;
else
pwm(k+1)=-1;
end;
if (Ub(k+1)>=u0p(k+1))
pwm_2pi3(k+1)=1;
else
pwm_2pi3(k+1)=-1;
end;
if (Uc(k+1)>=u0p(k+1))
pwm_4pi3(k+1)=1;
else
pwm_4pi3(k+1)=-1;
end;
Uashim(k+1)=kinv*(1/2)*((2*(pwm(k+1)))/3-(pwm_2pi3(k+1))/3-(pwm_4pi3(k+1))/3);
Ubshim(k+1)=kinv*(1/2)*(-pwm(k+1)/3+(2*pwm_2pi3(k+1))/3-pwm_4pi3(k+1)/3);
Ucshim(k+1)=kinv*(1/2)*(-pwm(k+1)/3-pwm_2pi3(k+1)/3+(2*pwm_4pi3(k+1))/3);
mass_t(k)=k*dt;
mass_u0p(k)=u0p(k+1);
mass_pwm(k)=pwm(k+1);
mass_Uashim(k)=Uashim(k+1);
end;
% Построение графиков
figure(5);
plot(mass_t,mass_u0p,'b');
grid on;
figure(6);
plot(mass_t,mass_pwm,'b');
grid on;
figure(7);
plot(mass_t,mass_Uashim,'b');
grid on;
На рис. 8 показан результат расчета опорного напряжения uоп с частотой ftriangle = 1000 Гц и изменяющейся амплитудой.
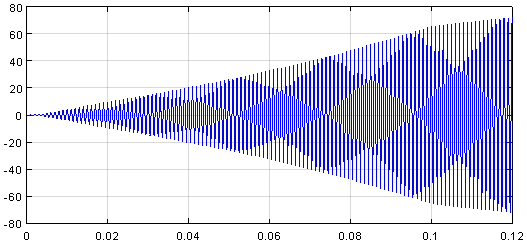
Рис. 8. Опорное напряжение uоп, с которым сравниваются напряжения Ua, Ub, Uc на выходе преобразователя координат (α, β → a, b, c)
Сигнал на выходе нуль-органа и напряжение в фазе А в линейном асинхронном двигателе даны на рис. 9 и 10.
Рис. 9. Сигнал на выходе нуль-органа в фазе А
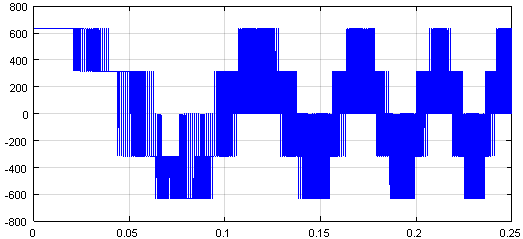
Рис. 10. Напряжение в фазе А
Остальные уровни в разомкнутой системе проводятся аналогично статье [2].
Наконец, приступим к главной части – замыканию всех обратных связей.
Математическое моделирование САР скорости системы «АИН ШИМ – ЛАД».
САР скорости системы «АИН ШИМ – ЛАД» показана на рис. 11.
% Математическая модель САР скорости системы АИН ШИМ - ЛАД с укладкой статорной обмотки классическим способом (z=12) с нулевым проводом
% Исходные данные асинхронного двигателя
|
Rb=0.1003*10^7; rs=9.5; LsA=0.074; LsB=0.076; LsC=0.07; rr=4.6345*10^-5; Lr=0.0372*10^-5; dt=0.00001; As=rs+LsA/dt; Bs=rs+LsB/dt; |
Cs=rs+LsC/dt; tz=9.769*10^-3; q=2; tau=3*tz*q; m=18; v0=0; wn=200; UA=wn/dt; F=0; tk=0.4; |
kc=4; Tm=0.005; ixzad(1)=0; iyzad(1)=0; ix(1)=0; iy(1)=0; Ki=8; Ti=2400; u4(1)=0; ixb=6; |
u2(1)=0; teta(1)=0; Fc=100; kinv=950; tau1=0; time=0; u0p(1)=1; pwm=-1; f_triangle=1000; |
X=zeros(24,1);
K=input('Длительность цикла k=');
for k=1:(K+1)
if ((k*dt >= 0) && (k*dt <= tk))
fc=k*dt*50/tk;
end;
if (k*dt > tk)
fc=50;
end;
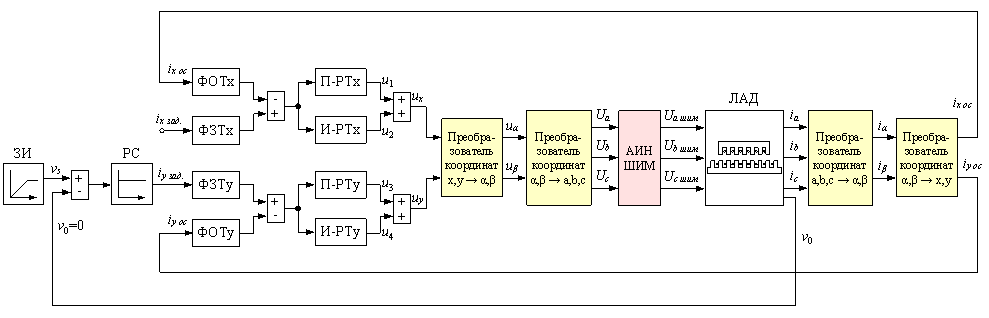 Рис. 11. САР скорости системы «АИН ШИМ-ЛАД» с Z1=12
Рис. 11. САР скорости системы «АИН ШИМ-ЛАД» с Z1=12
v(1,k)=v0; % Создание вектор-строки для графика скорости
f(1,k)=sum(F); % Создание вектор-строки для графика усилия
i0(1,k)=X(24);
i_a(1,k)=X(21);
i_b(1,k)=X(23);
i_c(1,k)=X(22);
vs=2*tau*fc;
vsum=vs-v0;
iyb=vsum*kc;
wk=vs*pi/tau;
teta(k+1)=teta(k)+wk*dt;
rox=cos(teta(k+1));
roy=sin(teta(k+1));
% 1 ступень прямого преобразования a,b,c -> alfa,beta
i_alfa=(1/3)*(2*i_a(1,k)-i_b(1,k)-i_c(1,k));
i_beta=(1/sqrt(3))*(i_b(1,k)-i_c(1,k));
% 2 ступень прямого преобразования alfa,beta -> x,y
ixoc(k)=rox*i_alfa+roy*i_beta;
iyoc(k)=-roy*i_alfa+rox*i_beta;
ixoc1(k+1)=ixoc(k)+(ix-ixoc(k))*dt/Tm; %Фильтр ФОТ x
ixzad(k+1)=ixzad(k)+(ixb-ixzad(k))*dt/Tm; %Фильтр ФЗТ x
iyoc1(k+1)=iyoc(k)+(iy-iyoc(k))*dt/Tm; %Фильтр ФОТ y
iyzad(k+1)=iyzad(k)+(iyb-iyzad(k))*dt/Tm; %Фильтр ФЗТ y
ixsum(k+1)=ixzad(k+1)-ixoc1(k+1);
iysum(k+1)=iyzad(k+1)-iyoc1(k+1);
u1(k+1)=ixsum(k+1)*Ki; %Пропорциональная часть x
u2(k+1)=u2(k)+ixsum(k+1)*dt/Ti; %Интегральная часть x
ux=u1(k+1)+u2(k+1);
u3(k+1)=iysum(k+1)*Ki; %Пропорциональная часть y
u4(k+1)=u4(k)+iysum(k+1)*dt/Ti; %Интегральная часть y
uy=u3(k+1)+u4(k+1);
% 1 ступень обратного преобразования x,y -> alfa,beta
usalfa=rox*ux-roy*uy;
usbeta=roy*ux+rox*uy;
% 2 ступень обратного преобразования alfa,beta -> a,b,c
Ua(k+1)=usalfa;
Ub(k+1)=-(1/2)*usalfa+(sqrt(3)/2)*usbeta;
Uc(k+1)=-(1/2)*usalfa-(sqrt(3)/2)*usbeta;
% Система АИН ШИМ
if ((k*dt >= 0) && (k*dt <= 0.1))
U0=k*dt*abs(sqrt((usalfa^2)+(usbeta^2)))/0.1;
end;
if (k*dt > 0.1)
U0=abs(sqrt((usalfa^2)+(usbeta^2)));
end;
tau1(k+1)=tau1(k)+dt*f_triangle;
time(k+1)=time(k)+dt;
if tau1(k+1)>=1
tau1(k+1)=tau1(k+1)-1;
end;
if (tau1(k+1)>=0) && (tau1(k+1)<0.5)
f1(k)=1-4*tau1(k+1);
else
f1(k)=4*tau1(k+1)-3;
end;
u0p(k+1)=U0*f1(k);
if (Ua(k+1)>=u0p(k+1))
pwm(k+1)=1;
else
pwm(k+1)=-1;
end;
if (Ub(k+1)>=u0p(k+1))
pwm_2pi3(k+1)=1;
else
pwm_2pi3(k+1)=-1;
end;
if (Uc(k+1)>=u0p(k+1))
pwm_4pi3(k+1)=1;
else
pwm_4pi3(k+1)=-1;
end;
Uashim(k+1)=kinv*(1/2)*((2*(pwm(k+1)))/3-(pwm_2pi3(k+1))/3-(pwm_4pi3(k+1))/3);
Ubshim(k+1)=kinv*(1/2)*(-pwm(k+1)/3+(2*pwm_2pi3(k+1))/3-pwm_4pi3(k+1)/3);
Ucshim(k+1)=kinv*(1/2)*(-pwm(k+1)/3-pwm_2pi3(k+1)/3+(2*pwm_4pi3(k+1))/3);
% Формирование матрицы А
A=zeros(24);
B=2*Rb*(rr+Lr/dt)+1/dt;
B1=6*Rb*(rr+Lr/dt)+(-4*Rb)*Lr*v0/(2*tz)+1/dt;
B2=55*Rb*(rr+Lr/dt)+(-45*Rb)*Lr*v0/(2*tz)+1/dt;
B3=550*Rb*(rr+Lr/dt)+(-450*Rb)*Lr*v0/(2*tz)+1/dt;
B4=1000*Rb*(rr+Lr/dt)+1/dt;
B5=550*Rb*(rr+Lr/dt)+450*Rb*Lr*v0/(2*tz)+1/dt;
B6=55*Rb*(rr+Lr/dt)+(45*Rb)*Lr*v0/(2*tz)+1/dt;
B7=6*Rb*(rr+Lr/dt)+(4*Rb)*Lr*v0/(2*tz)+1/dt;
C=-Rb*(rr+Lr/dt)+(2*Rb*Lr+1)*v0/(2*tz);
C1=-Rb*(rr+Lr/dt)+(6*Rb*Lr+1)*v0/(2*tz);
C2=-5*Rb*(rr+Lr/dt)+(55*Rb*Lr+1)*v0/(2*tz);
C3=-50*Rb*(rr+Lr/dt)+(550*Rb*Lr+1)*v0/(2*tz);
C4=-500*Rb*(rr+Lr/dt)+(1000*Rb*Lr+1)*v0/(2*tz);
C5=-500*Rb*(rr+Lr/dt)+(550*Rb*Lr+1)*v0/(2*tz);
C6=-50*Rb*(rr+Lr/dt)+(55*Rb*Lr+1)*v0/(2*tz);
C7=-5*Rb*(rr+Lr/dt)+(6*Rb*Lr+1)*v0/(2*tz);
D=-Rb*Lr*v0/(2*tz);
D1=5*D;D2=50*D;D3=500*D;
E=-Rb*(rr+Lr/dt)-(2*Rb*Lr+1)*v0/(2*tz);
E1=-5*Rb*(rr+Lr/dt)-(6*Rb*Lr+1)*v0/(2*tz);
E2=-50*Rb*(rr+Lr/dt)-(55*Rb*Lr+1)*v0/(2*tz);
E3=-500*Rb*(rr+Lr/dt)-(550*Rb*Lr+1)*v0/(2*tz);
E4=-500*Rb*(rr+Lr/dt)-(1000*Rb*Lr+1)*v0/(2*tz);
E5=-50*Rb*(rr+Lr/dt)-(550*Rb*Lr+1)*v0/(2*tz);
E6=-5*Rb*(rr+Lr/dt)-(55*Rb*Lr+1)*v0/(2*tz);
E7=-Rb*(rr+Lr/dt)-(6*Rb*Lr+1)*v0/(2*tz);
T=-wn*Lr*v0/(2*tz);
Y=-wn*(rr+Lr/dt);
M=Y+T;
N=Y-T;
W1=-wn*Lr/dt;
P=-Rb*Lr/dt;
Q=(2*Rb*Lr+1)/dt;
Q1=(6*Rb*Lr+1)/dt;
Q2=(55*Rb*Lr+1)/dt;
Q3=(550*Rb*Lr+1)/dt;
Q4=(1000*Rb*Lr+1)/dt;
for n=1:3
A(2*n+2,n+20)=(-1)^(n+1)*T;
A(2*n+3,n+20)=(-1)^(n+1)*M;
A(2*n+4,n+20)=(-1)^(n+1)*N;
A(2*n+5,n+20)=(-1)^n*T;
A(2*n+8,n+20)=(-1)^n*T;
A(2*n+9,n+20)=(-1)^n*M;
A(2*n+10,n+20)=(-1)^n*N;
A(2*n+11,n+20)=(-1)^(n+1)*T;
end;
for n=1:3
A(24,n+20)=1;
end;
A(24,24)=-1;
for n=1:12
A(n+4,n+4)=B;
A(n+5,n+4)=E;
A(n+3,n+4)=C;
end;
for n=1:13
A(n+2,n+4)=D;
A(n+5,n+3)=-D;
end;
|
A(1,1)=B4; A(1,2)=C5; A(1,3)=D2; A(2,1)=E4; A(2,2)=B5; A(2,3)=C6; A(2,4)=D1; A(3,1)=-D3; |
A(3,2)=E5; A(3,3)=B6; A(3,4)=C7; A(4,2)=-D2; A(4,3)=E6; A(4,4)=B7; A(5,3)=-D1; A(5,4)=E7; |
A(16,17)=C1; A(16,18)=D1; A(17,17)=B1; A(17,18)=C2; A(17,19)=D2; A(18,17)=E1; A(18,18)=B2; A(18,19)=C3; |
A(18,20)=D3; A(19,17)=-D1; A(19,18)=E2; A(19,19)=B3; A(19,20)=C4; A(20,18)=-D2; A(20,19)=E3; A(20,20)=B4; |
for n=1:2
A(21,n+4)=UA;
A(21,n+10)=-UA;
A(22,n+8)=UA;
A(22,n+14)=-UA;
A(23,n+6)=-UA;
A(23,n+12)=UA;
end;
A(21,21)=As;
A(22,23)=Bs;
A(23,22)=Cs;
% Матрица свободных членов
S=[ Q4*X(1)+P*( 500*X(2)); %1
Q3*X(2)+P*(500*X(1)+50*X(3)); %2
Q2*X(3)+P*(50*X(2)+5*X(4)); %3
Q1*X(4)+P*(5*X(3)+X(5)); %4
W1*X(21)+Q*X(5)+P*(X(4)+X(6)); %5
W1*X(21)+Q*X(6)+P*(X(5)+X(7)); %6
(-1)*W1*X(22)+Q*X(7)+P*(X(6)+X(8)); %7
(-1)*W1*X(22)+Q*X(8)+P*(X(7)+X(9)); %8
W1*X(23)+Q*X(9)+P*(X(8)+X(10)); %9
W1*X(23)+Q*X(10)+P*(X(9)+X(11)); %10
(-1)*W1*X(21)+Q*X(11)+P*(X(10)+X(12)); %11
(-1)*W1*X(21)+Q*X(12)+P*(X(11)+X(13)); %12
W1*X(22)+Q*X(13)+P*(X(12)+X(14)); %13
W1*X(22)+Q*X(14)+P*(X(13)+X(15)); %14
(-1)*W1*X(23)+Q*X(15)+P*(X(14)+X(16)); %15
(-1)*W1*X(23)+Q*X(16)+P*(X(15)+X(17)); %16
Q1*X(17)+P*(X(16)+5*X(18)); %17
Q2*X(18)+P*(5*X(17)+50*X(19)); %18
Q3*X(19)+P*(50*X(18)+500*X(20)); %19
Q4*X(20)+P*500*X(19); %20
UA*(X(5)+X(6)-X(11)-X(12))+(LsA/dt)*X(21)+Ua; %21
UA*(X(9)+X(10)-X(15)-X(16))+(LsB/dt)*X(23)+Ub; %22
UA*(X(13)+X(14)-X(7)-X(8))+(LsC/dt)*X(22)+Uc; %23
0]; %24
% Решение методом Гаусса-Жордана
Z=rref([A S]); %Приведение расширенной матрицы к треугольному виду
X=Z(1:24,25:25); %Выделение последнего столбца из матрицы
% Ток в роторе
Ir=[ 1000*Rb*X(1)-Rb*(500*X(2)); %1
550*Rb*X(2)-Rb*(500*X(1)+50*X(3)); %2
55*Rb*X(3)-Rb*(50*X(2)+5*X(4)); %3
6*Rb*X(4)-Rb*(5*X(3)+X(5)); %4
-wn*X(21)+2*Rb*X(5)-Rb*(X(4)+X(6)); %5
-wn*X(21)+2*Rb*X(6)-Rb*(X(5)+X(7)); %6
(-1)*(-wn)*X(22)+2*Rb*X(7)-Rb*(X(6)+X(8)); %7
(-1)*(-wn)*X(22)+2*Rb*X(8)-Rb*(X(7)+X(9)); %8
-wn*X(23)+2*Rb*X(9)-Rb*(X(8)+X(10)); %9
-wn*X(23)+2*Rb*X(10)-Rb*(X(9)+X(11)); %10
(-1)*(-wn)*X(21)+2*Rb*X(11)-Rb*(X(10)+X(12)); %11
(-1)*(-wn)*X(21)+2*Rb*X(12)-Rb*(X(11)+X(13)); %12
-wn*X(22)+2*Rb*X(13)-Rb*(X(12)+X(14)); %13
-wn*X(22)+2*Rb*X(14)-Rb*(X(13)+X(15)); %14
(-1)*(-wn)*X(23)+2*Rb*X(15)-Rb*(X(14)+X(16)); %15
(-1)*(-wn)*X(23)+2*Rb*X(16)-Rb*(X(15)+X(17)); %16
6*Rb*X(17)-Rb*(X(16)+5*X(18)); %17
55*Rb*X(18)-Rb*(5*X(17)+50*X(19)); %18
550*Rb*X(19)-Rb*(50*X(18)+500*X(20)); %19
1000*Rb*X(20)-Rb*(500*X(19))]; %20
% Электромагнитное усилие
F(1)=X(2)*Ir(1)/(2*tz);
for n=1:18
F(n+1)=(X(n+2)-X(n))*Ir(n+1)/(2*tz);
end;
F(20)=-X(19)*Ir(20)/(2*tz);
% Скорость
v0=v0+((sum(F)-Fc)/m)*dt;
mass_t(k)=k*dt;
mass_ixb(k)=ixb;
mass_iyb(k)=iyb;
mass_ixoc(k)=ixoc(k);
mass_iyoc(k)=iyoc(k);
mass_i_a(k)=i_a(1,k);
mass_i_b(k)=i_b(1,k);
mass_i_c(k)=i_c(1,k);
mass_i_alfa(k)=i_alfa;
mass_i_beta(k)=i_beta;
end;
% Построение графиков
figure(1);
plot(mass_t,mass_ixb,'b',mass_t,mass_ixoc,'r');
grid on;
figure(2);
plot(mass_t,mass_iyb,'b',mass_t,mass_iyoc,'r');
grid on;
figure(3);
plot(mass_t,mass_i_a,'b',mass_t,mass_i_b,'r',mass_t,mass_i_c,'g');
grid on;
figure(4);
plot(mass_t,mass_i_alfa,'b',mass_t,mass_i_beta,'r');
grid on;
figure(5);
plot(mass_t,mass_ixoc,'b',mass_t,mass_iyoc,'r');
grid on;
figure(6);
k=0:K;
subplot(2,1,1);
plot(k*dt,v);
title('Линейная скорость');
xlabel('t,c');
ylabel('v,m/c');
grid on;
subplot(2,1,2);
plot(k*dt,f);
title('Электромагнитное усилие');
xlabel('t,c');
ylabel('F,H');
grid on;
Результаты расчетов приведены на рис. 12, …, 17.
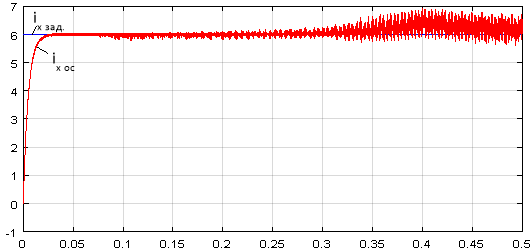
Рис. 12. Токи ix зад. и ix oc на входе фильтров ФЗТ и ФОТ
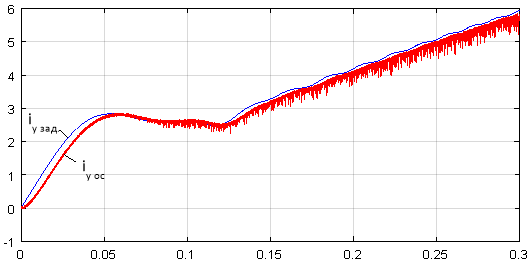
Рис. 13. Токи iy зад. и iy oc на входе фильтров ФЗТ и ФОТ
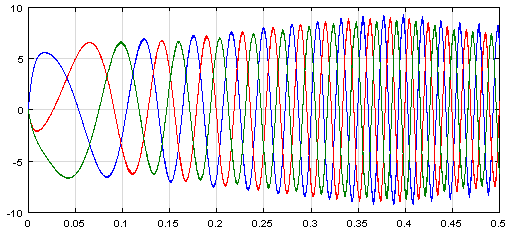
Рис. 14. Токи iа, ib, ic на выходе ЛАД
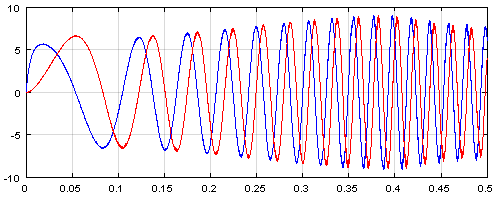
Рис. 15. Токи iα, iβ на выходе преобразователя (a, b, c → α, β)
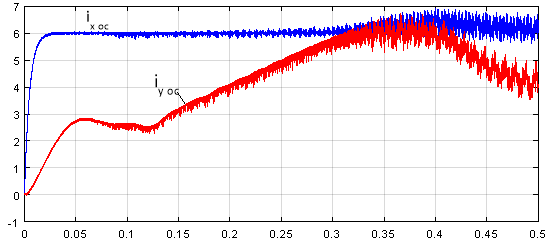
Рис. 16. Токи ix ос, iy ос на выходе прямого преобразователя координат
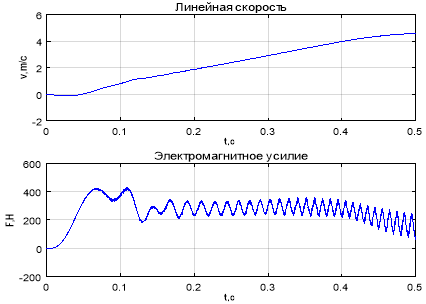
Рис. 17. График скорости и момента в замкнутой системе
Литература:
- Сарапулов Ф. Н., Емельянов А. А., Иваницкий С. В., Резин М. Г. Исследование электромеханических переходных процессов линейного асинхронного короткозамкнутого двигателя // Электричество. — 1982. — № 10. — С. 54–57.
- Емельянов А. А., Бесклеткин В. В., Прокопьев К. В., Ситенков А. А., Бурхацкий В. В., Мальцев Н. В. Математическая модель САР скорости линейного асинхронного двигателя на магнитных схемах замещения при векторном управлении // Молодой ученый. — 2016. — № 5. — С. 113–134.
- Шрейнер Р. Т. Математическое моделирование электроприводов переменного тока с полупроводниковыми преобразователями частоты. — Екатеринбург УРО РАН, 2000. — 654 с.
- Шрейнер Р. Т., Емельянов А. А., Медведев А. В. Оптимизация перемежающихся режимов работы частотно-регулируемого асинхронного электропривода // Известия ТулГУ. Технические науки. Вып. 3: в 5 ч. Тула: Изд-во ТулГУ, 2010. Ч 4. — 262 с.
- Шрейнер Р. Т., Емельянов А. А., Медведев А. В. Ресурсы энергосбережения в повторно-кратковременных режимах работы асинхронного привода // Промышленная энергетика. — 2011. — № 11. — С. 22–27.
- Веселовский О. Н., Коняев А. Ю., Сарапулов Ф. Н. Линейные асинхронные двигатели. — М.: — Энергоатомиздат, 1991. — 256 с.

