




Обзор систем управления приводом складских транспортных роботизированных платформ
Автор: Белоногов Александр Владимирович
Рубрика: 3. Автоматика и вычислительная техника
Опубликовано в
VI международная научная конференция «Технические науки в России и за рубежом» (Москва, ноябрь 2016)
Дата публикации: 07.11.2016
Статья просмотрена: 299 раз
Библиографическое описание:
Белоногов, А. В. Обзор систем управления приводом складских транспортных роботизированных платформ / А. В. Белоногов. — Текст : непосредственный // Технические науки в России и за рубежом : материалы VI Междунар. науч. конф. (г. Москва, ноябрь 2016 г.). — Москва : Буки-Веди, 2016. — С. 11-14. — URL: https://moluch.ru/conf/tech/archive/228/11326/ (дата обращения: 27.04.2024).
В статье рассматриваются особенности эксплуатации мобильных складских роботов, проводится анализ требований к приводу, использующемуся в данных платформах. Предлагаются обзор и анализ, в том числе и с энергетической точки зрения, типов электрического привода для складских роботизированных платформ. Приведены результаты сравнительного анализа векторной системы управления и системы с прямым управлением моментом для вентильного электродвигателя.
Ключевые слова: складские роботы, система управления электроприводом, автоматизированный склад, система управления электродвигателем
В настоящее время распространение применения роботизированных устройств имеет тенденцию устойчивого развития, оцениваемое в 25-30 % ежегодного увеличения объема рынка. Уже сейчас объем продаж сервисных, персональных и других роботизированных платформ достигает $ 2,2 млрд, а количество введенных в эксплуатацию роботов за последний 2014 год оценивается в 4,7 млн [1].
Одной из областей, где применение роботизированных платформ имеет большой потенциал, является организация и управление складов. Автоматизация складских процессов позволяет не только оптимизировать расходы предприятия на их организацию, но и повысить эффективность всего производства, так как все процессы участка, цеха или торгового зала берут начало на складе и заканчиваются там же. Следовательно, от организации складских работ, их эффективности, быстродействия, сведения к минимуму количества возникающих ошибок, оптимизации задействованных площадей зависит ритм работы всего предприятия, его эффективность. Кроме того, внедрение автоматизации склада позволяет как снизить количество задействованного персонала, так и увеличить безопасность оставшихся работников [2].
Широкое и общепринятое применение получил метод организации складов стеллажным способом. Его повсеместное распространение обуславливается простой и надежной схемой взаимодействия всех складских процессов: планирование приема и отгрузки партий, их комплектации, организации учета грузов, адресации и т.д. Функциональная схема организации этого решения представлена на рис. 1. Управление складским комплексом реализовано в виде двух взаимодействующих подсистем: системы задания задач и системы управления мобильными платформами. Первая организует прием задания от персонала и его выполнение. Вторая, базирующаяся на технологическом контроллере, осуществляет управление транспортными платформами [3].
Быстродействие системы, ее производительность и эффективность в первую очередь определяется устройствами исполнителями, т. е. производительностью и эффективностью роботизированных транспортных платформ.
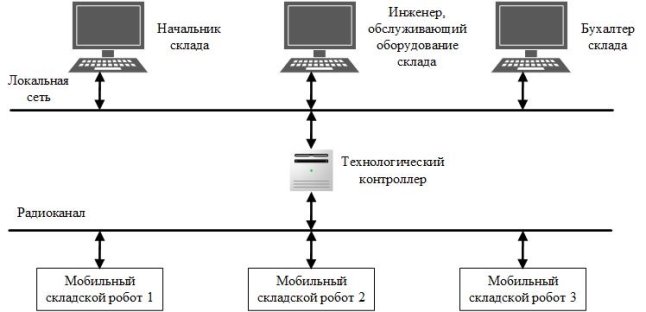
Рис. 1. Функциональная схема автоматизированной системы управления
Мобильный складской робот осуществляет функции подъема грузов на стеллажи и их спуска, а также их перемещения. Для качественного выполнения данных операций транспортная платформа должна удовлетворять следующим критериям [4, 5]:
- Возможность регулирования количества оборотов двигателя в широких пределах: от 8 до 20 к 1. При этом более рационально применять двухзонное регулирование скорости: это обеспечит перемещение грузов с повышенной массой с одной скоростью, а более легких — с увеличенной.
- В зависимости от применяемых в приводах механизмах требования для минимальных скоростей варьируются в диапазоне от 0.02 до 0.25 м/с.
- Особенно важны жесткие механические характеристики, не зависящие от величины нагрузки и обеспечивающие заданную скорость.
- Значение ускорений не должны превышать определённых значений, обычно требуемые ограничения оцениваются в диапазоне от 0.1 до 0.5 м/с2. При этом должно обеспечиваться оптимальное быстродействие в переходных процессах.
- Одно из ключевых требований, переделяемых к складским роботам — высокая точность: 2-5 мм.
Возможность удовлетворения выдвинутым к роботизированной платформе требованиям в значительной мере определяются применимыми в ней приводами. Так как в абсолютном большинстве случаев применяются электрические приводы, то эффективность, быстродействие и точность привода определяется как типом электродвигателя, так и системой его управления. Ключевой проблемой всех мобильных платформ также является время автономной работы, обусловленное ограниченным запасом энергии батарей робота. Учитывая этот фактор, наиболее рационально применять вентильные электродвигатели (ВД), обеспечивающие наиболее высокие показатели энергоэффективности и массогабаритные характеристики. [6]
Общепризнанными системами управления вентильным электродвигателем являются векторное управление и прямое управление моментом. Обе системы используют контроль над моментом и магнитным потоком для удовлетворения заданным значениям переходных и статических процессов управления скорости, в независимости от внешних или внутренних возмущающих воздействий.
Векторная система управления привода с ВД использует принцип ориентирования вектора магнитного потока Ψ. Благодаря использованию постоянных магнитов, магнитный поток неразрывно связан с углом поворота ротора. Т. е. если в системе координат d-q, связанной с ротором, ток Id=0, то величина потокосцепления по оси d будет постоянной. Так как потокосцепление ВД двигателя имеет постоянное значение, электромагнитный момент пропорционален току Iq. Регулирование этого тока осуществляется замкнутой системой управления [7].
Вектор тока проецируется как на ось d, так и на ось q, в тоже время магнитный поток имеет проекцию только на ось d. Исходя из того, что сгенерированный двигателем момент прямо пропорционален току оси q, а поток ротора по оси d имеет постоянную величину — возможно достижение максимального момента на единицу тока [8].
Схема системы прямого управления имеет в своем составе ПИ регулятор скорости и два регулятора гистерезисного типа. Основным принципом данной системы является выбор вектора напряжения по заранее составленной таблице значений. Организация этого принципа осуществляется при использовании гистерезисных регуляторов потокосцепления статора и момента.
Подробный сравнительный анализ систем векторного управления и прямого управления моментом для вентильного двигателя проведен в [9]. Из выводов данного источника следует, что и та, и другая система имеет преимущества при работе в тех или иных режимах работы.
При работе в переходных, динамических режимах системы с прямым управлением момента использовать более рационально, благодаря оптимальной отработке возмущающих воздействий.
Тем не менее, при работе в статическом режиме предпочтительнее использование векторных систем управления для ВД. Преимущество объясняется тем, что в данном режиме работы система с прямым управлением момента имеет более худшие показатели качества регулирования системы. Устранение этого недостатка возможно увеличением дискретизации, что выдвигает дополнительные требования к используемым вычислительным ресурсам.
Заключение
Исходя из проведённого анализ требований, выдвигаемых к современным приводам складских мобильных платформ, наиболее оптимальным для применения является вентильный электродвигатель. Обеспечивая наиболее высокие показатели энергоэффективности среди электродвигателей малой и средней мощности он, в сочетании с системой управления двигателем позволяет полностью удовлетворить выдвинутые требования. Среди систем управления ВД следует выделить систему с прямым управлением момента, которая в сочетании с мощными вычислительными средствами и высокой частотой дискретизации позволяет наиболее эффективно с энергетической точки зрения осуществить точное и быстрое регулирование скорости оборотов двигателя.
Литература:
- Белоногов А.В. Анализ и выбор систем навигации робота для позиционирования в условиях замкнутого пространства // Материалы IV Международной научной конференции «Технические науки: проблемы и перспективы» — 2016. — С. 40-42.
- Белов М.П., Губин А.Н. Особенности разработки системы управления электроприводами механизмов робота-штабелера автоматизированного склада // Известия Санкт-Петербургского государственного электротехнического университета ЛЭТИ. — 2014. — № 6. — С. 61-69.
- Драницкий И.О. Использование мобильных роботов для автоматизации складских помещений. // Вестник науки и образования. — 2015. — № 6 (8). С. 5-9.
- Белов М.П. Cовременные подходы к структурно-параметрическому синтезу и исследованию систем управления автоматизированными электроприводами. Санкт-Петербург.: Изд-во СПбГЭТУ«ЛЭТИ», 2012. 208 с.
- Справочник по автоматизированному электроприводу / под ред. В. А. Елисеева и А. В. Шинянского. М.: Энергоатомиздат, 1987. 616 с.
- Мещеряков В.Н., Петунин А.А. Энергетические характеристики насосных установок с вентильным индукторным и асинхронным короткозамкнутым двигателями. //Вестник Всероссийского научно-исследовательского и проектно-конструкторского института электровозостроения. — 2007. — № 2. — С. 86-93.
- Hiren M., Pankit T., Hemangini V. Comparative study of field oriented control and direct torque control of induction motor // Journal of information knowledge and research in electrical engineering. — 2011. — V. 1. — № 2. — P. 44–50.
- Mohamed R. Direct Instantaneous Torque Control in Direct Drive Permanent Magnet Synchronous Motors — a New Approach // IEEE Trans. Energy Conversion. — 2007. — V. 22. — № 4. — P. 829–838.
- Рефки А.Э.В.А., Каракулов А.С., Дементьев Ю.Н., Кладиев С.Н. Сравнительный анализ векторного управления и прямого управления моментом синхронного электродвигателя с постоянными магнитами // Известия Томского политехнического университета. Инжиниринг георесурсов. — 2011. — Т. 319. № 4. — С. 93-99.
Ключевые слова
система управления электроприводом, складские роботы, автоматизированный склад, система управления электродвигателемПохожие статьи
Обзор алгоритмов управления асинхронными электроприводами
Векторное управление, ориентированное по роторному потоку, для
4. Нечувствительность системы векторного управления скоростью к изменениям параметров асинхронного двигателя.
Рис. 3. Система управления позицией асинхронного двигателя прямым методом.
асинхронный двигатель, система управления, векторное...
Моделирование системы векторного управления для привода... MATLAB, Блок, векторное управление, главное движение, модель, переходной процесс напряжений статора, статический момент, короткозамкнутый ротор, асинхронный двигатель, момент времени.
Выбор системы управления двигателем электромобиля
система управления, прямое управление, векторное управление, скалярное управление, момент, система, DC-DC, напряжение, метод управления, электродвигатель.
Векторное управление с ориентацией по потоку ротора для...
4. Нечувствительность системы векторного управления скоростью к изменениям параметров асинхронного двигателя. Блоки (ejρr) и (2→3). Векторное управление с ориентацией по потоку ротора для асинхронного двигателя, питающегося от инвертора напряжения.
Применение датчиков положения ротора для создание...
Возможны также и бездатчиковые схемы управления вентильными двигателями с использованием для формирования сигналов о положении ротора моментов прохождения через нуль...
Исследование системы векторного управления...
В настоящее время частотно-регулируемый электропривод переменного тока становится главным типом регулируемого промышленного электропривода, серийно выпускаемого ведущими электротехническими компаниями.
Векторное управление активным выпрямителем напряжения
Исследование системы векторного управления...
Система управления скоростью (позицией) вращения асинхронного двигателя в косвенной форме.
прямое преобразование координат, задание матрицы, система уравнений, система координат, график напряжений, вид...
Создание вращающего момента вентильного электродвигателя
В этой связи в области управления электромеханическими системами с бесконтактными двигателями постоянного тока возникает ряд
Рис. 1. Функциональная схема вентильного электродвигателя. Рис. 2. Схема размещения обмотки и магнитных потоков фазы А (Фа).
Похожие статьи
Обзор алгоритмов управления асинхронными электроприводами
Векторное управление, ориентированное по роторному потоку, для
4. Нечувствительность системы векторного управления скоростью к изменениям параметров асинхронного двигателя.
Рис. 3. Система управления позицией асинхронного двигателя прямым методом.
асинхронный двигатель, система управления, векторное...
Моделирование системы векторного управления для привода... MATLAB, Блок, векторное управление, главное движение, модель, переходной процесс напряжений статора, статический момент, короткозамкнутый ротор, асинхронный двигатель, момент времени.
Выбор системы управления двигателем электромобиля
система управления, прямое управление, векторное управление, скалярное управление, момент, система, DC-DC, напряжение, метод управления, электродвигатель.
Векторное управление с ориентацией по потоку ротора для...
4. Нечувствительность системы векторного управления скоростью к изменениям параметров асинхронного двигателя. Блоки (ejρr) и (2→3). Векторное управление с ориентацией по потоку ротора для асинхронного двигателя, питающегося от инвертора напряжения.
Применение датчиков положения ротора для создание...
Возможны также и бездатчиковые схемы управления вентильными двигателями с использованием для формирования сигналов о положении ротора моментов прохождения через нуль...
Исследование системы векторного управления...
В настоящее время частотно-регулируемый электропривод переменного тока становится главным типом регулируемого промышленного электропривода, серийно выпускаемого ведущими электротехническими компаниями.
Векторное управление активным выпрямителем напряжения
Исследование системы векторного управления...
Система управления скоростью (позицией) вращения асинхронного двигателя в косвенной форме.
прямое преобразование координат, задание матрицы, система уравнений, система координат, график напряжений, вид...
Создание вращающего момента вентильного электродвигателя
В этой связи в области управления электромеханическими системами с бесконтактными двигателями постоянного тока возникает ряд
Рис. 1. Функциональная схема вентильного электродвигателя. Рис. 2. Схема размещения обмотки и магнитных потоков фазы А (Фа).




