




Целью данной работы является овладение технологией сборки модели электропривода на базе асинхронного двигателя с векторным управлением в пакете SimPowerSystems для использования в лабораторной работе по дисциплине «Математическое моделирование электромеханических систем». За основу принята математическая модель из электронного ресурса [1]. Показаны пути поиска разделов необходимых элементов схемы электропривода, позволяющих студентам без больших потерь времени получить необходимые характеристики. Полезные рекомендации по работе в SimPowerSystems даны в работах [2], [3], [4], [5].
Общая схема электропривода показана на рис. 1.
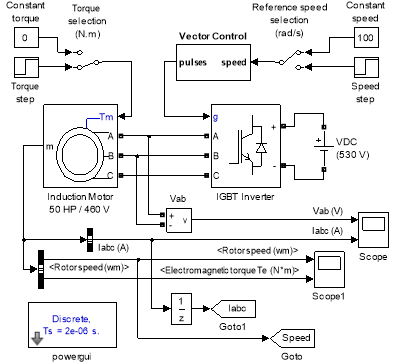
Рис. 1. Электропривод на базе асинхронного двигателя с векторным управлением
Модель асинхронного двигателя (Induction Motor) представлена блоком Asynchronous Machine SI Units из раздела Machines библиотеки SimPowerSystems (Simscape), инвертор напряжения (IGBT Inverter) представлен блоком Universal Bridge из раздела Power Electronics (рис. 2). Источник питания VDC (блок DC Voltage Source) необходимо взять из раздела Electrical Sources и задать постоянное напряжение 530 В.
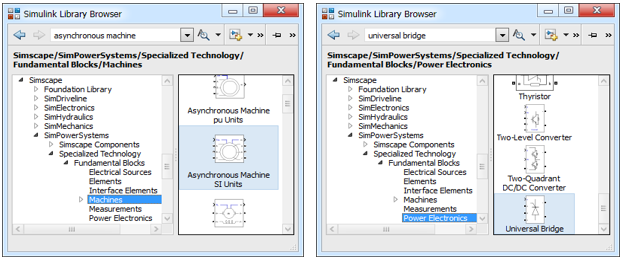
Рис. 2. Расположение блоков Asynchronous Machine SI Units и Universal Bridge
Параметры асинхронного двигателя даны на рис. 3.
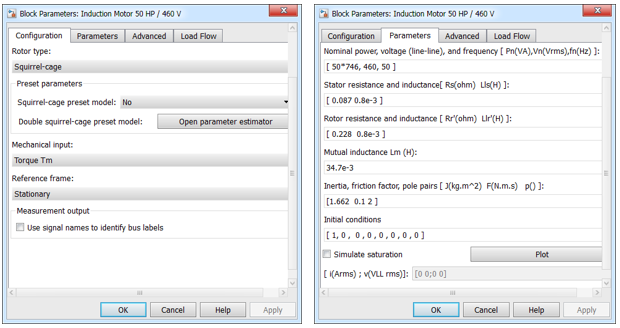
Рис. 3. Параметры асинхронного двигателя
Параметры инвертора напряжения приведены на рис. 4. Скорость (Speed) и нагрузка на валу двигателя (Torque) задаются постоянными (блоки Constant), либо ступенчатыми в блоках Step. Параметры блоков Torque step и Speed step представлены на рис. 5.
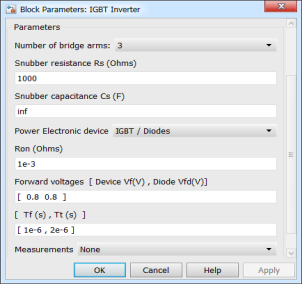
Рис. 4. Параметры инвертора напряжения
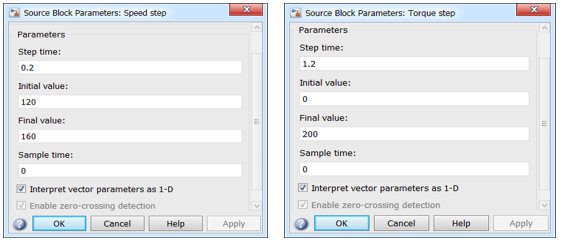
Рис. 5. Параметры задатчиков скорости и нагрузки на валу (Speed step и Torque step)
Единичная дискретная задержка 1/z осуществляется блоком Unit Delay из раздела Discrete библиотеки Simulink. Для работы модели необходим блок Powergui, который можно найти в разделе Fundamental Blocks библиотеки SimPowerSystems (Simscape). Параметры этих блоков следует задать в соответствии с рис. 6.
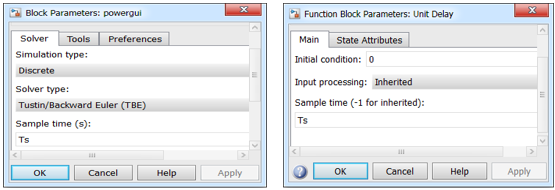
Рис. 6. Параметры блоков Powergui и Unit Delay
Блоки Goto и Goto1 служат для передачи сигналов в блоки From. В поле Goto tag необходимо задать наименования сигналов: Speed и Iabc (рис. 7).
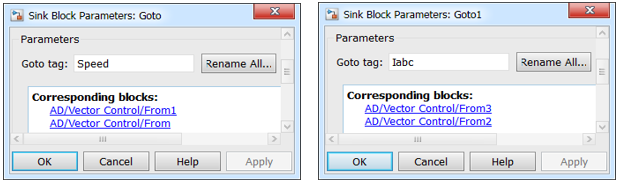
Рис. 7. Параметры блоков Goto и Goto1
Блок векторного управления (Vector Control), представленный на рис. 8, включает в себя: регулятор скорости, регулятор тока, блоки расчета токов и потока, угла положения и преобразователи координат. Сборку каждой из схем следует производить в блоках Subsystem раздела Ports & Subsystems библиотеки Simulink.
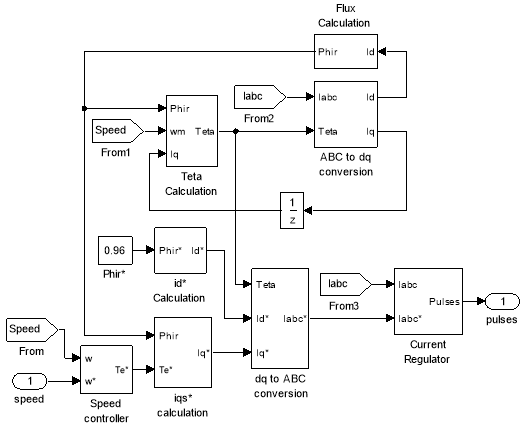
Рис. 8. Блок векторного управления (Vector Control)
Регулятор скорости (Speed Controller) представлен на рис. 9. Параметры дискретного интегратора 1 (Discrete-Time Integrator1) даны на рис. 13. Пределы ограничителя величины сигнала (блок Saturation) показаны на схеме (рис. 9).
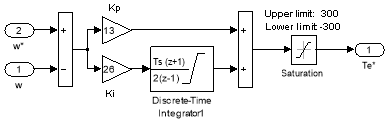
Рис. 9. Регулятор скорости (Speed Controller)
Блоки расчета токов iqs* и id* показаны на рис. 10 и 11. В блоке Fcn необходимо задать следующее выражение:
u[1]*0.341/(u[2]+1e-3).
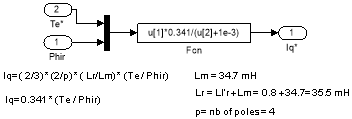
Рис. 10. Расчет тока iqs* (блок iqs* calculation)
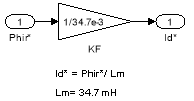
Рис. 11. Расчет тока id* (блок id* Calculation)
Блок расчета угла положения θ представлен на рис. 12. В блоке Fcn1 необходимо задать выражение:
34.7e-3*u[1]/(u[2]*0.1557+1e-3).
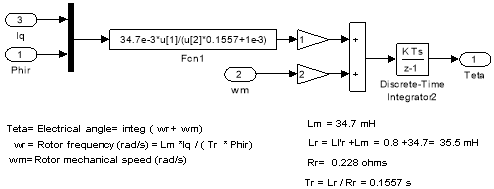
Рис. 12. Расчет угла положения θ (блок Teta Calculation)
Параметры дискретного интегратора 2 (Discrete-Time Integrator2) даны на рис. 13.
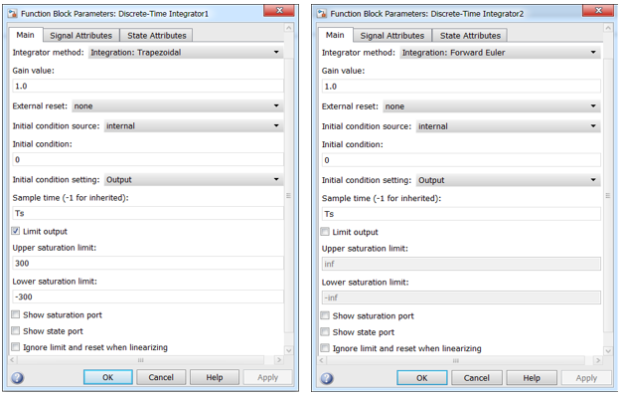
Рис. 13. Параметры дискретных интеграторов 1 и 2
Расчет потока (Flux Calculation) показан на рис. 14. Параметры блока Discrete Transfer Fcn даны на рис. 15.
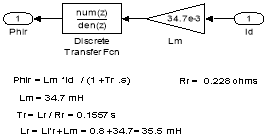
Рис. 14. Расчет потока (блок Flux Calculation)
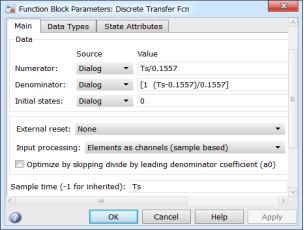
Рис. 15. Параметры блока Discrete Transfer Fcn
Преобразователи координат «ABC → dq» и «dq → ABC» (conversion) приведены на рис. 16 и 17. Функции синусов, косинусов и токов задаются в блоках Fcn.
В параметрах блока id необходимо записать выражение:
u[1]*u[3]+(1.7320508*u[2]-u[1])*u[4]*0.5+(-u[1]-1.7320508*u[2])*u[5]*0.5.
В блоке iq:
-u[2]*u[3]+(u[2]+1.7320508*u[1])*u[4]*0.5+(u[2]-1.7320508*u[1])*u[5]*0.5.
В блоке ia:
-u[3]*u[2] + u[4]*u[1].
В блоке ib:
(-u[1]+1.7320508*u[2])*u[4]*0.5+(u[2]+1.7320508*u[1])*u[3]*0.5.
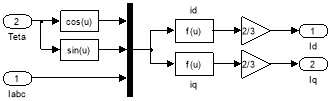
Рис. 16. Преобразователь координат ABC → dq
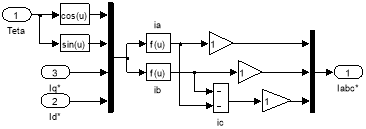
Рис. 17. Преобразователь координат dq → ABC
Регулятор тока (Current Regulator) приведен на рис. 18. Параметры блоков Relay показаны на рис. 19. В преобразователях типов данных Data Type Conversion необходимо задать соответствующие значения: boolean или double и поставить галочку напротив параметра Saturate on integer overflow (рис. 19). Оператор NOT задается в блоке Logical Operator.
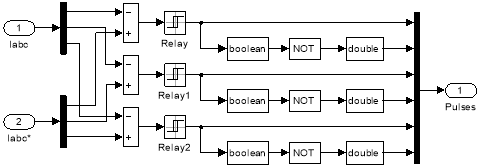
Рис. 18. Регулятор тока (Current Regulator)
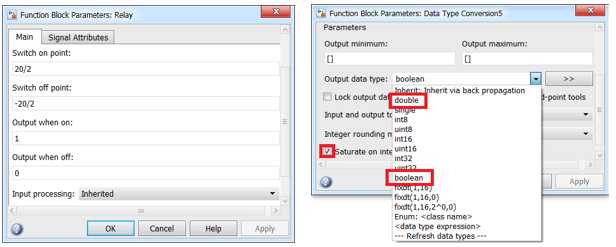
Рис. 19. Параметры блоков Relay
Графики скорости, электромагнитного момента и фазных токов выводятся на осциллографы Scope и Scope1 с помощью блоков Bus Selector (библиотека Simulink/Signal Routing). Линейное напряжение выводится через блок Voltage Measurement (Vab).
Результаты моделирования электропривода на базе асинхронного двигателя с векторным управлением даны на рис. 20, 21 и 22.
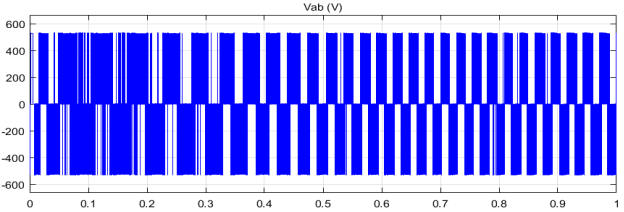
Рис. 20. Линейное напряжение Uab
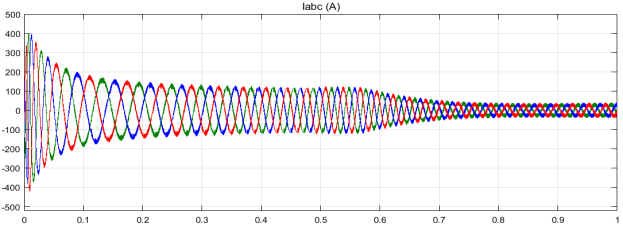
Рис. 21. Фазные токи ia, ib, ic
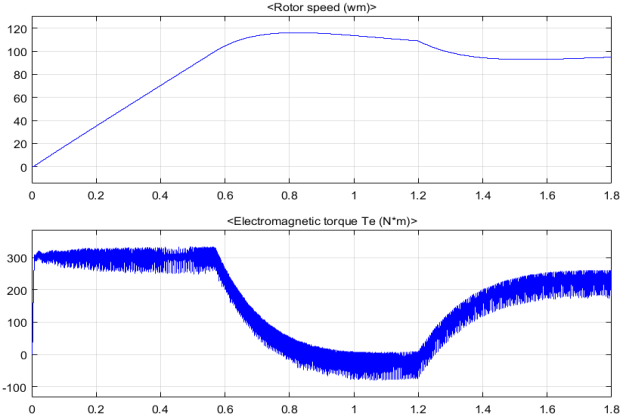
Рис. 22. Графики скорости и электромагнитного момента
Литература:
- Герман-Галкин С.Г. Matlab & Simulink. Проектирование мехатронных систем на ПК. – СПб.: КОРОНА-Век, 2008. – 368 с.
- Герман-Галкин С. Г. Компьютерное моделирование полупроводниковых систем в MATLAB 6.0: Учебное пособие. – СПб.: КОРОНА принт, 2007. – 320 с.
- Черных И. В. Моделирование электротехнических устройств в MATLAB, SimPowerSystems и Simulink. – М.: ДМК Пресс; СПб.: Питер, 2008. – 288 с.
- SimscapePowerSystemsExamples [Электронный ресурс] // MathWorks. - Режим доступа: www.mathworks.com/help/physmod/sps/examples.html.
- Терёхин В. Б. Моделирование систем электропривода в Simulink (Matlab 7.0.1): учебное пособие / В. Б. Терёхин; Национальный исследовательский Томский политехнический университет. – Томск: Изд-во Томского политехнического университета, 2010. – 292 с.
