




Выбор системы управления двигателем электромобиля
Автор: Варзаносов Павел Викторович
Рубрика: 9. Транспорт
Опубликовано в
VI международная научная конференция «Технические науки в России и за рубежом» (Москва, ноябрь 2016)
Дата публикации: 01.11.2016
Статья просмотрена: 3056 раз
Библиографическое описание:
Варзаносов, П. В. Выбор системы управления двигателем электромобиля / П. В. Варзаносов. — Текст : непосредственный // Технические науки в России и за рубежом : материалы VI Междунар. науч. конф. (г. Москва, ноябрь 2016 г.). — Москва : Буки-Веди, 2016. — С. 47-51. — URL: https://moluch.ru/conf/tech/archive/228/11297/ (дата обращения: 26.04.2024).
Ключевые слова: электромобиль, система управления электроприводом, векторное управление
Электромобиль — современное новое экологичное средство передвижения. Несмотря на большую популярность бензиновых автомобилей, неизбежное будущее будет за машинами, не загрязняющими окружающую среду. И тенденция развития электротранспорта вполне логична. Растущие цены на бензин заставляют задумать об экономичности использования автомобилей с бензиновым двигателем, растущий уровень шума в городах, производимый машинами пагубно влияет на здоровье граждан. Эти и многие другие факторы привели к тому, что каждая ведущая автомобильная компания взялась за разработку собственного электромобиля [1]. Качественным отличием электромобиля от автомобиля является использование асинхронного либо синхронного трехфазного электродвигателя вместо традиционного бензинового. Управление мотором электродвигателя требует определенного быстродействия и создания необходимого момента на валу. Для этих целей используют различные системы управления электродвигателем. О выборе системы управления для электромобиля будет рассказано в этой статье.
Для того чтобы понять какое место занимает электродвигатель в машине и каким образом происходит управление, рассмотрим блок-схему перспективного электромобиля, представленную на рисунке 1 [3]. На схеме изображены основные элементы, а именно:
‒ электродвигатель;
‒ питающая аккумуляторная батарея;
‒ упрощенная трансмиссия, оснащенная одноступенчатым редуктором;
‒ инвертор;
‒ зарядное устройство на борту, чтобы обеспечивать возможность зарядки от бытовой розетки;
‒ электронная система управления элементами конструкции;
‒ DC-DC преобразователь;
‒ вспомогательная батарея, которая используется в качестве питающего элемента климат-контроля, аудиосистемы, освещения.
‒ управление электромобилем [2].
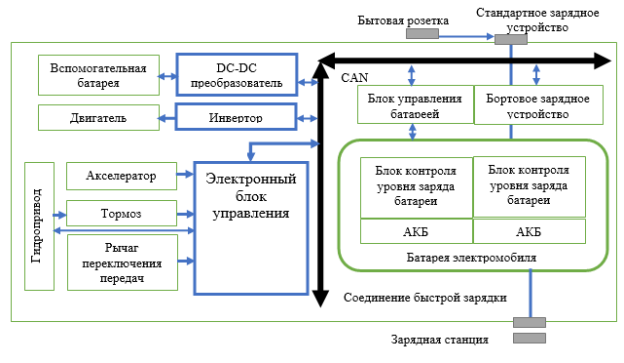
Рис. 1. Блок-схема электромобиля
Инвертор — это элемент, которые преобразует постоянный ток в трехфазный переменный, а также включает в себя систему управления двигателями. Чтобы понять, какие параметры влияют на систему управления, рассмотрим структуру инвертора, изображенную на рисунке 2 [3].
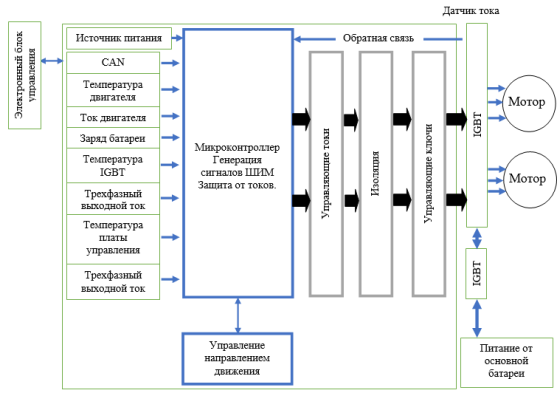
Рис. 2. Блок-схема инвертора
Опыт различных компаний в создании и реализации электромобилей, накопленный к настоящему моменту позволяют выдвинуть определенные требования не только к самому электромобилю, но и к системе управления приводом автомобиля, в частности. Из всего ряда требований, выдвигаемых к электромобилю, выберем те, что относятся к системе управления двигателем и улучшают потребительские качества автомобиля, как средства передвижения.
Основные требования к системе управления электроприводом:
‒ плавное изменение скорости;
‒ стабильность автоматического поддержания установленной водителем скорости не ниже 10 %, данное требование позволяет энергетически выгодно использовать энергию в условиях городской эксплуатации;
‒ плавное управление тяговым и тормозным моментом при разгоне и торможении соответственно;
‒ автоматическое ограничение максимального момента и мощности на определенном уровне;
‒ ограничение зарядного тока при рекуперативном торможении, при определенном уровне заряда;
‒ возможность движения в режиме наката с последующим плавным разгоном или электрическим торможением;
На микроконтроллере частотного преобразователя выполняется программное обеспечение, которое управляет скоростью и моментом двигателя за счет изменения частоты, напряжения, промежуточных токов в различных системах координат. Основные методы управления представлены на рисунке 3.
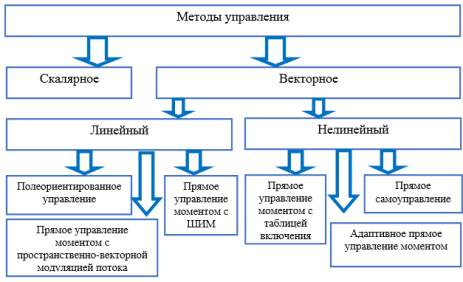
Рис. 3. Методы управления [5].
Рассмотрим системы управления, наиболее часто использующиеся в различных частотных преобразователях.
Скалярное управление или как его еще называют частотное, так как этот метод управления электродвигателем переменного тока заключается в том, что поддерживается постоянное соотношение напряжение/частота во всем рабочем диапазоне скоростей, следственно изменяя частоту изменяется напряжение, а за ним и скорость вращения ротора. Это отношение вычисляется исходя из номинальных значений напряжения и частоты. Поддерживание этого соотношения на определенном уровне, можно поддерживать магнитный поток на определенном уровне. Существенным плюсом этой системы является простота ее реализации. Этот единственный плюс нивелируется такими недостатками как:
‒ Невозможно реализовать бездатчиковую систему управления асинхронным двигателем с набросом нагрузки, а система с датчиком скорости имеет низкую точность управления с нагрузкой, синхронный двигатель может вовсе выйти из синхронизма при увеличении момента выше предельного;
‒ Невозможно одновременно управлять и моментом, и скоростью двигателя;
Чаще всего скалярное управление используется в системах с большим диапазоном регулирования скорости. В нашем случае, данная система управления не подходит в виду того, что в электромобиле необходима точная регулировка скорости с нагрузкой на валу, а также в виду того, что скалярное управление не позволяет плавно изменять момент на валу.
Векторное управление, в отличие от скалярного, позволяет независимо и практически безынерционно управлять скоростью вращения и моментом на валу двигателя. Как показывает практика, недостаточно управлять напряжением и частотой, необходимо управлять и фазой, то есть контролировать значение и угол пространственного вектора [4]. Существующие методы управления моментом обычно классифицируют на две группы исходя из того, какие по своей структуре используются регуляторы, а именно: линейные и нелинейные (гистерезисные). В данной статье не подразумевается производить глубокий анализ всех систем управления в виду емкости теории по каждой из них, поэтому рассмотрим особенности, преимущества и недостатки векторных систем с управлением моментом.
Полеориентированное управление подразумевает отдельное управление как моментом, так и полем статора с помощью составляющих вектора поля статора. Все особенности этой системы связаны с указанием в программе правильных и точных характеристик двигателя, то есть использовать адекватную модель электропривода [6]. При использовании системы с прямым управлением моментом с пространственно-векторной модуляцией напряжения необходимо точно вычислять нагрузку на валу, линейность регулятора уменьшает пульсации момента, позволяет плавно запускать двигатель и уверенно работать на низких оборотах, но ухудшает динамические характеристики. Особенностью нелинейного регулятора с прямым управлением моментом заключается в том, что порядок включения транзисторных ключей определяется таблицей, в которой заключены различные состояния вектора напряжения. Характеристики системы зависят от ее настройки и частоты сравнения с вектором напряжения. Увеличение частоты приводит к увеличению стоимости соответственно. Характерными особенностями прямого управления является полное использование возможностей инвертора по напряжению, а также отличная динамика при работе с постоянным и ослабевающим полем.
Наиболее подходящей для системы управления электромобиля является система векторного управления с прямым управлением моментом с таблицей включения. Отразив в таблице все возможные состояния вектора и увеличив частоту итераций можно получить отличные и статические, и динамические характеристики, а также удовлетворить всем другим требованиям, выдвинутым к системе. На данном этапе развития электромобилей эта система управления однозначно приведет к существенному удорожанию системы управления, а следственно и всего электромобиля, но в дальнейшем, по мере увеличения популярности электрокаров, по прогнозам экспертов, цена снизится, а вот качество управления останется на высоком уровне.
Литература:
- Варзаносов П. В.Анализ преимуществ и недостатков видов легкого электротранспорта / В сборнике: Технические науки: проблемы и перспективы Материалы IV Международной научной конференции. 2016. С. 89–91.
- http://autoleek.ru/dvigatel/jelektricheskij-dvigatel/ustrojstvo-jelektromobilja.html (дата обращения 29.10.2016)
- http://toshiba.semicon-storage.com/ru/application/automotive/ecology/hev-ev.html (дата обращения 29.10.2016)
- CristianBusca. Открытый контур управления низкой скорости для СДПМ в высоком динамическом приложении. — Ольборг, Дания.: Ольборг университет, 2010.
- http://engineering-solutions.ru/motorcontrol/vfd/ (дата обращения 29.10.2016)
6. Семыкина И. Ю., Завьялов В. М. Сравнительный анализ систем регулирования угловой скорости асинхронного электродвигателя / Вестник Кузбасского государственного технического университета 2005. № 6 (51). С. 61–66.
Похожие статьи
Обзор алгоритмов управления асинхронными электроприводами
Векторное управление, ориентированное по роторному потоку, для асинхронного двигателя, питающегося от источника тока.
Рис. 3. Система управления позицией асинхронного двигателя прямым методом.
Векторное управление активным выпрямителем напряжения
Исследование системы векторного управления...
Система управления скоростью (позицией) вращения асинхронного двигателя в косвенной форме.
прямое преобразование координат, задание матрицы, система уравнений, система координат, график напряжений...
асинхронный двигатель, система управления, векторное...
Обзор алгоритмов управления асинхронными электроприводами. асинхронный двигатель, система управления, векторное управление, трансформация координат, инвертор напряжения, тяговый электропривод троллейбусов, статорный ток, позиция ротора...
Исследование системы векторного управления...
асинхронный двигатель, система управления, векторное управление, трансформация координат, инвертор напряжения, тяговый электропривод
Обзор алгоритмов управления асинхронными электроприводами. асинхронный двигатель, система управления, векторное...
блок, ABC, асинхронный двигатель, векторное управление...
Векторное управление активным выпрямителем напряжения. В этой системе управления блок преобразования координат «XY-ABC» осуществляет преобразование проекций Ix и Iy обобщенного вектора сетевого тока из вращающейся системы координат к трехфазной...
Обзор систем управления приводом складских транспортных...
система управления, магнитный поток, прямое управление, платформа, прямое управление момента, вентильный электродвигатель, векторное управление, векторная система управления...
Моделирование прямого пуска асинхронного двигателя с ШИМ...
Обзор алгоритмов управления асинхронными электроприводами. 4. Нечувствительность системы векторного управления скоростью к изменениям параметров асинхронного двигателя.
Система автоматического управления малоразмерным...
система управления, прямое управление, векторное управление, скалярное управление, момент. Система автоматического управления малоразмерным газотурбинным двигателем.
Математическая модель САР скорости линейного асинхронного...
Элементы системы управления (ЗИ, фильтры, регуляторы) «привязаны» к вращающейся системе координат, а
Рис. 20. График скорости и момента в замкнутой системе.
Векторное управление активным выпрямителем напряжения. Скачать Часть 2 (pdf).
Похожие статьи
Обзор алгоритмов управления асинхронными электроприводами
Векторное управление, ориентированное по роторному потоку, для асинхронного двигателя, питающегося от источника тока.
Рис. 3. Система управления позицией асинхронного двигателя прямым методом.
Векторное управление активным выпрямителем напряжения
Исследование системы векторного управления...
Система управления скоростью (позицией) вращения асинхронного двигателя в косвенной форме.
прямое преобразование координат, задание матрицы, система уравнений, система координат, график напряжений...
асинхронный двигатель, система управления, векторное...
Обзор алгоритмов управления асинхронными электроприводами. асинхронный двигатель, система управления, векторное управление, трансформация координат, инвертор напряжения, тяговый электропривод троллейбусов, статорный ток, позиция ротора...
Исследование системы векторного управления...
асинхронный двигатель, система управления, векторное управление, трансформация координат, инвертор напряжения, тяговый электропривод
Обзор алгоритмов управления асинхронными электроприводами. асинхронный двигатель, система управления, векторное...
блок, ABC, асинхронный двигатель, векторное управление...
Векторное управление активным выпрямителем напряжения. В этой системе управления блок преобразования координат «XY-ABC» осуществляет преобразование проекций Ix и Iy обобщенного вектора сетевого тока из вращающейся системы координат к трехфазной...
Обзор систем управления приводом складских транспортных...
система управления, магнитный поток, прямое управление, платформа, прямое управление момента, вентильный электродвигатель, векторное управление, векторная система управления...
Моделирование прямого пуска асинхронного двигателя с ШИМ...
Обзор алгоритмов управления асинхронными электроприводами. 4. Нечувствительность системы векторного управления скоростью к изменениям параметров асинхронного двигателя.
Система автоматического управления малоразмерным...
система управления, прямое управление, векторное управление, скалярное управление, момент. Система автоматического управления малоразмерным газотурбинным двигателем.
Математическая модель САР скорости линейного асинхронного...
Элементы системы управления (ЗИ, фильтры, регуляторы) «привязаны» к вращающейся системе координат, а
Рис. 20. График скорости и момента в замкнутой системе.
Векторное управление активным выпрямителем напряжения. Скачать Часть 2 (pdf).




