




Объектом данного исследования является сортировочная станция (СС).
Сортировочной станцией называется железнодорожная станция, на которой выполняется расформирование прибывших составов, которым оно необходимо и формирование новых для дальнейшей отправки по пути назначения. Непосредственно расформирование поездов осуществляется на так называемых сортировочных горках (СГ), основным принципом работы которых является свободный спуск вагонов, скатывающихся с горки [1].
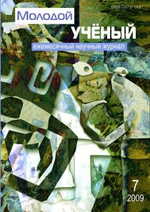
Очевидно, что сортировочная станция является открытой системой [2], так как постоянно имеет место огромное влияние внешней среды – климатических факторов на технические устройства, технологические процессы и человеческие ресурсы. Схематично это можно изобразить следующим образом (рисунок 1):
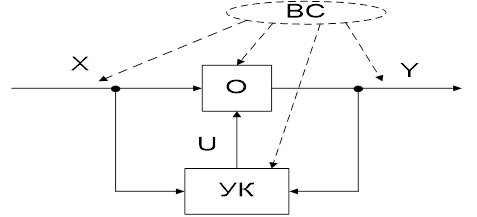
Рис.1 – Сортировочная станция как объект управления, открытый для влияния внешней среды
Где Х – входной поток, прибывающие на станцию составы для расформирования;
Y – выходной поток, сформированные для отправки составы;
О – объект управления сортировочная станция,
УК – управляющий комплекс, оборудование для управления технологическими процессами на станции;
U – управляющее воздействие, сигналы управления оборудованием;
ВС – внешняя среда, географическое местоположение сортировочной станции, в которой находятся и объект управления и и потоки составов.
Комплексная система автоматизации технологических процессов на железнодорожной сортировочной станции (КСАУ СП) была разработана Ростовским филиалом ОАО НИИАС (бывшим ВНИИАС МПС) дочерним предприятием ОАО РЖД. КСАУ СП призвана существенно улучшить показатели работы СС, уменьшить влияние человеческого фактора на технологические процессы и повысить безопасность труда [3].
При внедрении КСАУ СП на СС железнодорожной сети страны был выявлен ряд проблем, которые оказывают отрицательное влияние на качество управления станционными процессами. Проблемы заключаются в существенном отличии предельных и среднегодовых параметров внешней среды – климатических условий, в которые погружена конкретная сортировочная станция [4].
Статистические данные параметров внешней среды, полученные при помощи находящейся непосредственно на СС метеостанции, накопленные в базе данных КСАУ СП и обработанные автором, приведены в таблице 1.
В таблице 1  - математическое ожидание,
- математическое ожидание,  ,
,
σ – стандартное отклонение, σ =  .
.
Анализ данных таблицы 1 показывает, что годовой разброс температуры воздуха превышает 70оС, отклонение от среднестатистического порядка ±35 оС; скорость порывов ветра может достигать 20 м/с; влажность варьироваться от 0 до 100%, а количество осадков может выпадать в несколько миллиметров за час.
При этом, «нормальными» условиями для работы аппаратуры считается температура около 200С, при отсутствии осадков. Для человеческого тела же наиболее благоприятный тепловой баланс сохраняется в среднем при температуре 21 - 24 0С и влажности 80 – 85%, называемых «зоной комфорта», хотя для многих конкретных людей она может быть расширена или смещена. Пределы температуры зоны комфорта 10 – 27 0С. Зону комфорта можно также сохранять при изменении влажности в следующих пределах:
Температура, 0С 20 25 30 35
Относительная влажность, % 85 60 44 33
И если условия для работы персонала на рабочих местах в помещении создаются при помощи отопления и кондиционирования, то напольная аппаратура вынуждена работать в текущих условиях.
Таблица 1
Предельные и среднестатистические параметры среды функционирования сортировочных станций за 2008-2009 год*
|
Название станции |
Климатические факторы |
||||||||||||
|
Температура, оС |
Скорость ветра, м/с |
Количество осадков, мм |
Влажность воздуха, % |
Атмосферное давление, мм рт. столба |
|||||||||
|
мин |
макс. |
сред. стат. |
макс. |
сред. стат. |
макс. |
сред. стат. |
мин |
макс. |
сред. стат. |
мин. |
макс. |
сред. стат. |
|
|
Красноярск восточный |
-41 |
31 |
6,3 |
27 |
5 |
2,48 |
0,0018 |
31 |
98 |
73 |
726 |
759 |
741 |
|
Челябинск четный |
-30 |
34 |
4,6 |
19 |
4,3 |
1,25 |
0,0012 |
16 |
100 |
68 |
741 |
783 |
762 |
|
Входная Омск |
-33 |
35 |
3,3 |
24 |
3,1 |
2,55 |
0,0012 |
20 |
97 |
65 |
732 |
767 |
749 |
|
Бекасово Москва |
-26 |
39 |
13,9 |
5 |
0,15 |
- |
- |
- |
- |
- |
- |
- |
- |
|
Инская четная Новосиб. |
-41 |
33 |
7,4 |
21 |
3,7 |
2,13 |
0,0016 |
21 |
97 |
69 |
736 |
768 |
751 |
|
|
-34 |
34,4 |
7,1 |
19,2 |
3,25 |
2,15 |
0,0015 |
22 |
98 |
68,75 |
733,8 |
769,25 |
750,3 |
|
σ |
6,7 |
3 |
4,1 |
8,5 |
1,9 |
0,6 |
0,0003 |
6,4 |
1,4 |
3,3 |
6,3 |
10 |
8,7 |
Зависимость свободного пробега отцепов со схожими характеристиками от текущих метеоусловий хорошо просматривается по статистическим данным работы КСАУ СП в таблице 2. Как видно из таблицы 2 (отцеп 1), фактический свободный пробег отцепа в текущих погодных условиях по пути парка может в 2 раза отличаться от расчетного, рассчитанного для «нормальных» условий. Отцепы 3 и 4, например, имеют одинаковые параметры, но расчетная скорость выхода из 3ТП у них отличалась почти в 2 раза. При этом, фактический пробег по парковым путям практически одинаковый. Т.е. погодные условия, в данном случае, почти в 2 раза изменили ходовые свойства этих отцепов.
Таблица 2
Зависимость длины свободного пробега отцепов на путях сортировочного парка от сочетания различных значений климатических факторов*
|
№ |
Название станции |
wk |
kv |
Vn |
Осадки, мм |
t, оС |
Vw, м/с |
Spr, м |
Sfakt, м |
|
1 |
Челябинск четный |
5 |
3 |
2,28 |
Идет снег |
-12,7 |
Незначит. |
825 |
390 |
|
2 |
Челябинск четный |
5 |
2 |
2,34 |
Отсутствуют |
-5,7 |
Незначит. |
600 |
550 |
|
3 |
Входная (Омск) |
1 |
1 |
4,12 |
Отсутствуют |
-19,1 |
Незначит. |
780 |
700 |
|
4 |
Входная (Омск) |
1 |
1 |
2,9 |
Отсутствуют |
4,2 |
4 |
750 |
750 |
|
5 |
Входная (Омск) |
2 |
1 |
3,3 |
Отсутствуют, но 100% влажность |
3,9 |
0 |
1050 |
1050 |
В таблице 2 обозначено: wk – весовая категория отцепа, kv – количество вагонов в отцепе, Vn – скорость выхода отцепа из 3ТП, осадки – количество осадков в мм если это дождь и наличие / отсутствие если это снег, t – температура воздуха, Vw – скорость ветра относительно направления движения отцепов, Spr – расчетный свободный пробег отцепа без учета погодных условий, Sfakt – фактический пробег отцепа.
Таким образом, по таблице 2 наглядно видно, что влияние климатических условий может достигать двухкратного изменения управляющего воздействия – в нашем случае расчетной скорости выхода отцепов из 3ТП (разница между 3 и 4 отцепами по скорости выхода из 3 ТП почти 100%, а по свободному пробегу – менее 10%).
Это доказывает необходимость создания модуля оценки и компенсации влияния климатических условий. С этой целью необходимо формализовать влияние среды на технологические процессы и использовать полученные формализованные данные для управления исполнительными устройствами.
Управление исполнительными устройствами сортировочного процесса, учитывая воздействие среды, можно осуществлять, используя различные подходы.
Первым и наиболее распространенным подходом в теории автоматического управления является управление по отклонению. При этом рассчитывается ошибка x выходного сигнала ур от заданного уз, и эта ошибка используется для расчета корректирующих управляющих воздействий. В нашем случае такой ошибкой могут служить отклонения в дальности пробега отцепов по путям парка реальных от прогнозируемых без учета погодных условий (смотри таблицу 2), превышения скорости соударения отцепов.
Графически управление по отклонению можно представить следующим образом (рисунок 2):
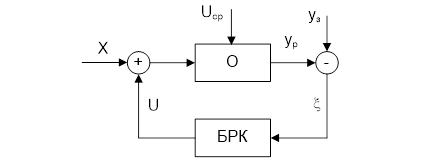
Рис. 2 – сущность метода управления по отклонению сортировочным процессом
где О – объект управления сортировочная горка, БРК – блок расчета коррекции, U – корректирующее управляющее воздействие, Х – управляющее воздействие без учета влияния среды, Uср – воздействие среды, ур - фактический результат работы объекта управления, уз - требуемый результат работы, x - ошибка управления x = уз - ур.
Также существует способ управления по возмущению. Основным отличием его от управления по отклонению является корректировка управления не по отклонению фактического результата работы объекта управления от заданного, а сразу по возмущающему воздействию, вызывающему это отклонение. Возмущающим воздействием, в нашем случае, являются параметры среды. Таким образом, получаем упреждающее управление – до того как возмущающее воздействие нарушит функционирование объекта управления, рассчитываем и выдаем корректирующее управление, рассчитанное по возмущающему воздействию, которое сейчас будет влиять на объект управления.
Однако, для того чтобы формировать упреждающее управление по возмущению, необходимо рассчитать влияние этого возмущения. Поэтому на практике необходимо применять комбинированный метод управления, включающий в себе управление и по отклонению и по возмущению.
При комбинированном методе управления возмущающее воздействие внешней среды Uср попадает также в БРК, например, посредством метеостанции, и позволяет выработать упреждающее управление для уменьшения инерционности и повышения качества управления сортировочным процессом.
Графически результат работы системы – заданный уз и фактический уф, а также ошибку регулирования x можно представить следующим образом (рисунок 3):
Рис. 3 – результат работы системы при комбинированном методе управления сортировочным процессом
Время выхода результата работы системы на заданные значения характеризует инерционность системы. Минимальное отклонение фактических показателей работы системы от заданных после настройки регулирования характеризует качество регулирования.
Библиографический список
- Фонарев Н.М. Автоматизация процесса расформирования составов на сортировочных горках. М.: Транспорт, 1971 г. – 272 с
- L. von Bertalanffy. General System Theory – A Critical Review, “General Systems”, vol 7, 1962, p 1 – 20. Перевод Н. С. Юлиной.
- Соколов В. Н. Комплексная система автоматизации сортировочных процессов: техническое, технологическое, интеллектуальное обеспечение. //Канд. дис. Ростов н/Д, 2008. - 182 с.
- Ольгейзер И. А., Афонин К. В., Оленич Д. А. Анализ работы замедлителей парковых тормозных позиций. – М.: Автоматика, связь и информатика, 2007.
