




Математическое моделирование САР скорости системы «АИН ШИМ – АД» с идеализированными транзисторными ключами
Емельянов Александр Александрович, доцент;
Бесклеткин Виктор Викторович, ассистент;
Авдеев Александр Сергеевич, студент;
Габзалилов Эльвир Фиргатович, студент;
Прокопьев Константин Васильевич, студент;
Ситенков Александр Александрович, студент;
Пестеров Дмитрий Ильич, студент;
Юнусов Тимур Шамильевич, студент
Российский государственный профессионально-педагогический университет
Эта работа необходима для методических указаний к выполнению студентами лабораторных и практических работ по дисциплинам «Системы управления электроприводов» и «Математическое моделирование электромеханических систем». Эта статья является продолжением предыдущей работы [1].
Развернутая схема САР скорости «АИН ШИМ – АД» дана на рис. 2. Задание на скорость ![]() формируется в Signal Builder (номер 1) (рис. 1).
формируется в Signal Builder (номер 1) (рис. 1).
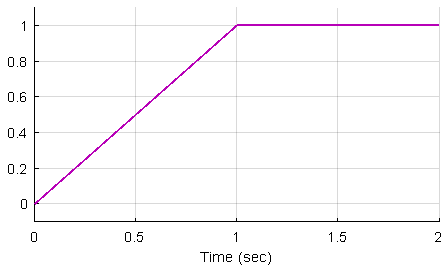
Рис. 1. Задание на скорость ![]()
Под каждым элементом развернутой схемы САР скорости указаны его номер и название. С целью уменьшения объема статьи произведем группировку некоторых элементов.
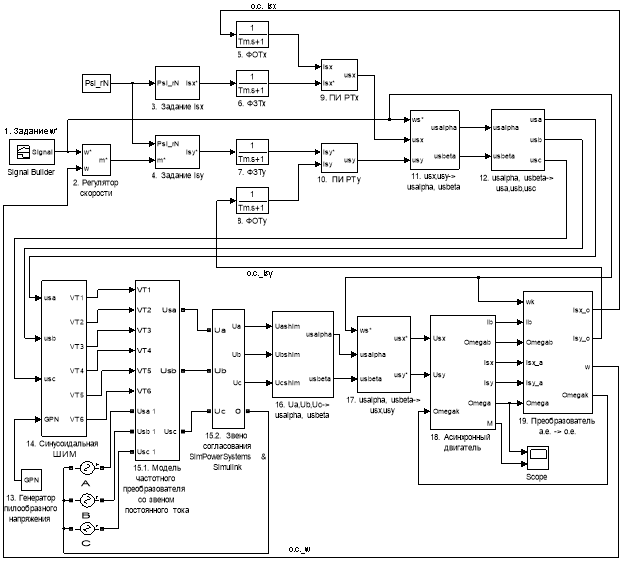
Рис. 2. Развернутая математическая модель САР скорости системы «АИН ШИМ – АД»
Математические модели регулятора скорости (номер 2), задание на проекции статорного тока по оси x (номер 3) и y (номер 4) даны на рис. 3, 4, 5.
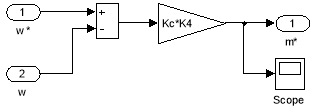
Рис. 3. Регулятор скорости
![]()
Рис. 4. Задание
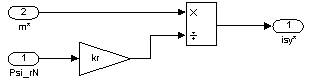
Рис. 5. Задание ![]()
Фильтры под номерами 5, 6, 7, 8 имеют одинаковые передаточные функции с постоянной времени Tμ = 0.005 с.
Регуляторы тока по проекциям x и y под номерами 9 и 10 даны на рис. 6 и 7 [4].
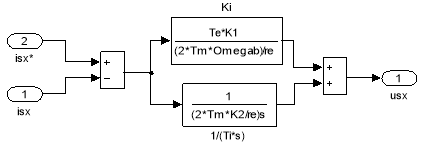
Рис. 6. Регулятор статорного тока по проекции х: ПИ-РТх
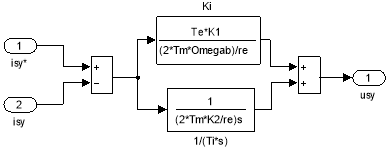
Рис. 7. Регулятор тока по проекции y: ПИ-РТy
Преобразователи координат на развернутой схеме САР скорости даны под номерами 11 и 12 ![]() и
и ![]() и приведены на рис. 8 и 9 [4], [6].
и приведены на рис. 8 и 9 [4], [6].
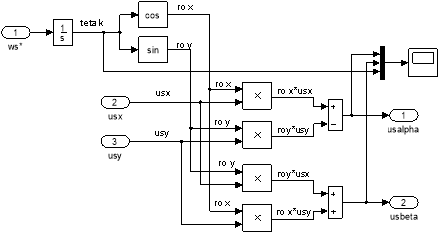
Рис. 8. Преобразователь координат: x, y → α, β
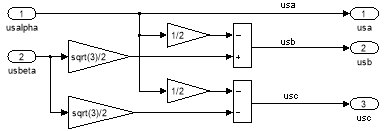
Рис. 9. Преобразователь координат: α, β → a, b, c
Математическая модель АИН ШИМ (номер 14) вместе с генератором пилообразного напряжения GPN (номер 13) даны на рис. 10 и 11.
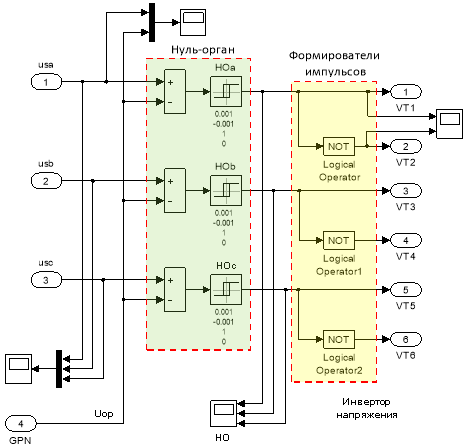
Рис. 10. Математическая модель АИН ШИМ
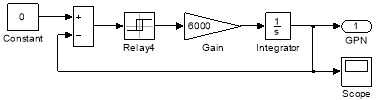
Рис. 11. Генератор пилообразного напряжения (GPN)
Модель частотного преобразователя со звеном постоянного тока (номер 15.1) представлена на рис. 12 [2], [5].
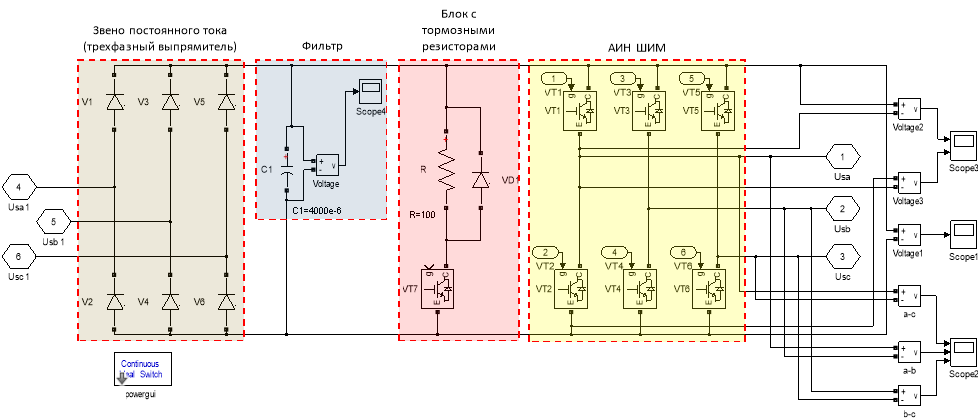
Рис. 12. Модель частотного преобразователя со звеном постоянного тока на идеализированных транзисторных ключах
Для согласования элементов библиотеки Simulink с элементами SimPowerSystems необходимо включить в схему дополнительное звено (номер 15.2), показанное на рис. 13.
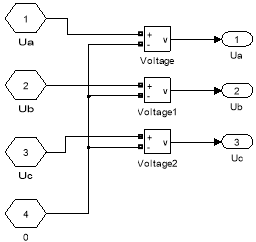
Рис. 13. Звено согласования SimPowerSystems и Simulink
Преобразователи координат под номерами 16 и 17 ![]() и
и ![]() даны на рис. 14 и 15.
даны на рис. 14 и 15.
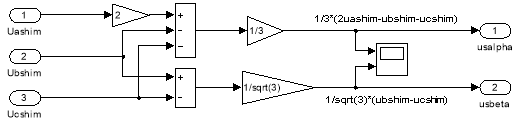
Рис. 14. Преобразователь координат: ![]()
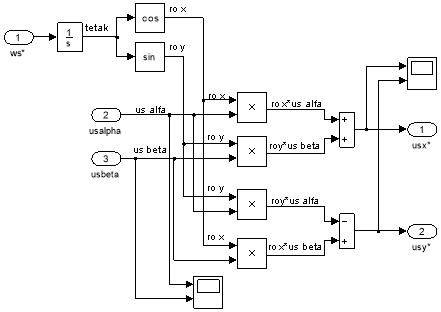
Рис. 15. Преобразователь координат: ![]()
Математическая модель двигателя (номер 18) дана на рис. 16, 17, 18 и 19.
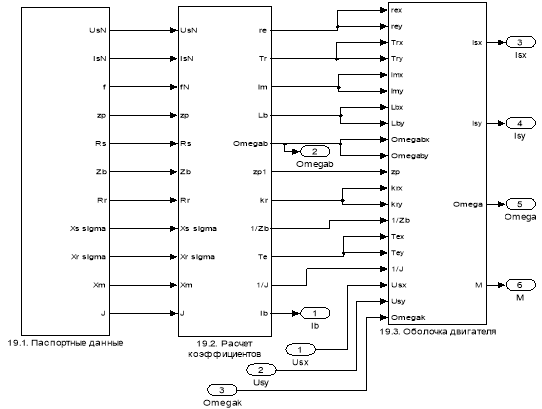
Рис. 16. Математическая модель АД с переменными ΨR - IS
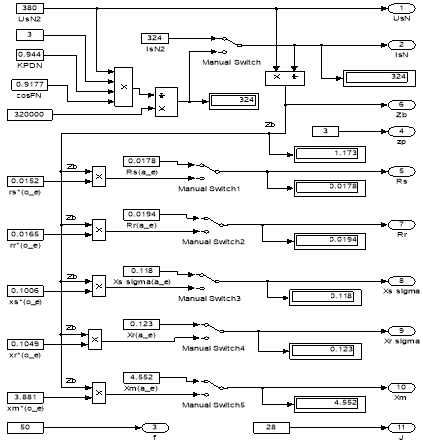
Рис. 17. Расчет коэффициентов по паспортным (справочным) данным
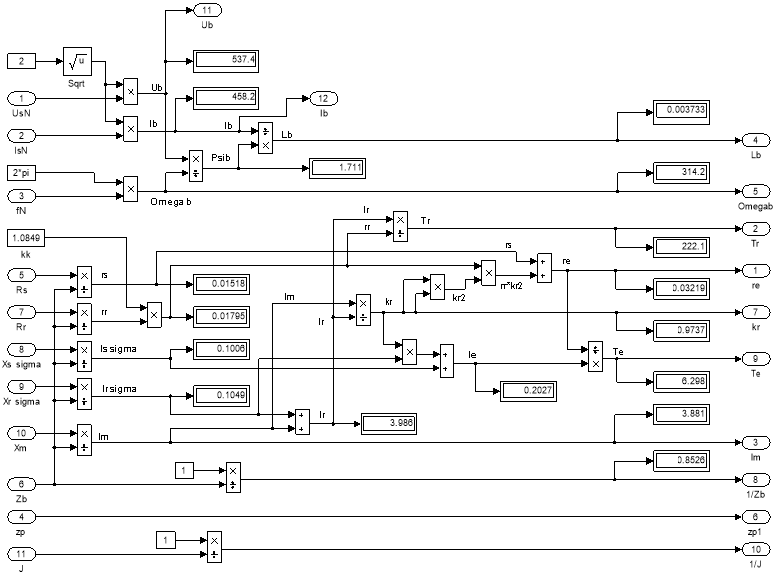
Рис. 18. Определение коэффициентов оболочки асинхронного двигателя в Simulink-Matlab
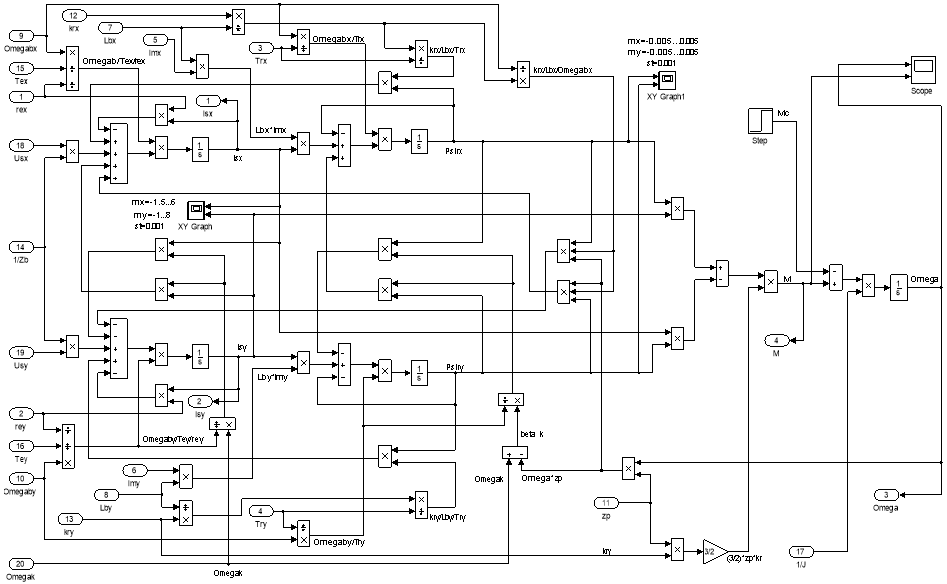
Рис. 19. Модель оболочки асинхронного двигателя с переменными ΨR - IS в Simulink-Matlab на основе интегрирующих звеньев
Преобразователь параметров из системы абсолютных единиц в относительные (номер 19) приведен на рис. 20.
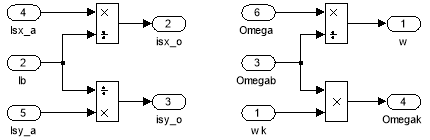
Рис. 20. Преобразователь параметров из системы абсолютных единиц в относительные
В работе [3] в главе 6 «Примеры» дан образец расчета параметров асинхронного двигателя. В наших дальнейших работах направленных на подготовку студентов к исследовательской работе, глава 6 окажет неоценимую помощь. Можно было бы по аналогии рассмотреть паспортные данные любого другого двигателя, но для проверки правильности выводов уравнений сделанных исследовательской группой самостоятельно, необходимо постоянно выходить на многие полученные результаты в работе [4]. Поэтому, этот пример расчета окажется очень полезным.
Номинальные данные:
Номинальный режим работыS1;
Номинальная мощность![]()
Номинальное фазное напряжение![]()
Номинальный фазный ток![]()
Номинальная частота![]()
Номинальная синхронная скорость![]()
Номинальная скорость ротора![]()
Номинальный КПД![]()
Номинальный коэффициент мощности![]()
Число пар полюсов![]()
Параметры Т-образной схемы замещения при номинальной частоте:
Активное сопротивление обмотки статора![]()
Индуктивное сопротивление рассеяния обмотки статора![]()
Активное сопротивление обмотки ротора, приведенное к статору![]()
Индуктивное сопротивление рассеяния обмотки ротора, приведенное статору![]()
Главное индуктивное сопротивление![]()
Суммарный момент инерции двигателя и механизма![]()
Базисные величины системы относительных единиц:
Напряжение![]()
Ток![]()
Частота![]()
Скорость ротора
Сопротивление![]()
Потокосцепление![]()
Индуктивность![]()
Используя номинальные данные двигателя, определяем:
![]()
где![]() – коэффициент, учитывающий различие значений электромагнитного момента и момента на валу двигателя в номинальном режиме (
– коэффициент, учитывающий различие значений электромагнитного момента и момента на валу двигателя в номинальном режиме (![]() ).
).

В качестве базисной мощности выбираем значение электромагнитной мощности двигателя в номинальном режиме, определяемое по следующей формуле:
![]()
Относительные значения параметров схемы замещения двигателя:
![]()
![]()
![]()
![]()
Механическая постоянная времени:
![]()
Номинальное значение скольжения:
![]()
Относительное значение номинальной скорости ротора:
![]()
Нормирующий энергетический коэффициент:
![]()
![]()
![]()
![]()
![]()
При расчете режимов работы, для того чтобы ![]()
![]()
![]()
![]() и
и ![]() , необходимо откорректировать
, необходимо откорректировать ![]()
![]()
где![]() – корректирующий коэффициент [3, с. 296].
– корректирующий коэффициент [3, с. 296].
![]() - коэффициент, показывающий отношение
- коэффициент, показывающий отношение ![]() к
к ![]() .
.
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
Расчет параметров производим в Script:
%Номинальные данные
PN=320000;
UsN=380;
IsN=324;
fN=50;
Omega0N=104.7;
OmegaN=102.83;
nN=0.944;
cos_phiN=0.92;
zp=3;
%Параметры Т-образной схемы замещения при номинальной частоте
Rs=0.0178;
Xs=0.118;
Rr=0.0194;
Xr=0.123;
Xm=4.552;
J=28;
%Базисные величины системы относительных единиц
Ub=sqrt(2)*UsN;
Ib=sqrt(2)*IsN;
OmegasN=2*pi*fN;
Omegab=OmegasN;
Omegarb=Omegab/zp;
Zb=Ub/Ib;
Psib=Ub/Omegab;
Lb=Psib/Ib;
kd=1.0084;
Mb=kd*PN/OmegaN;
Pb=Mb*Omegarb;
rs=Rs/Zb;
ls=Xs/Zb;
lr=Xr/Zb;
lm=Xm/Zb;
Tj=J*Omegarb/Mb;
betaN=(Omega0N-OmegaN)/Omega0N;
wN=(1-betaN);
SsN=3*UsN*IsN;
zetaN=SsN/Pb;
ks=lm/(lm+ls);
kr=lm/(lm+lr);
lbe=ls+lr+ls*lr*lm^(-1);
roN=0.9962;
rr=roN*betaN;
alphar=kr*rr/lm;
le=kr*lbe;
re=rs+(kr^2)*rr;
Te=le/re;
Tr=(lm+lr)/rr;
Psi_rN=0.942;
Tm=0.005;
K1=1;
K2=950;
K4=0.1;
Kc=260;
Результаты расчетов скорости Ω и электромагнитного момента M приведены на рис. 21.
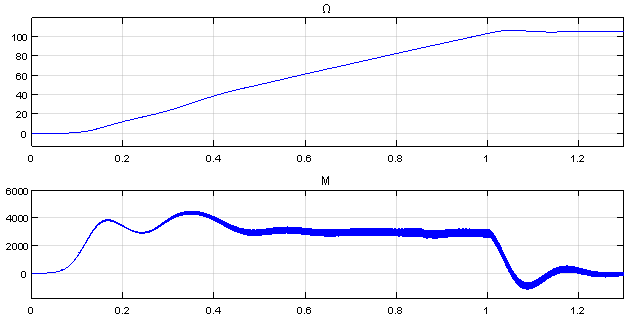
Рис. 21. Графики скорости и момента
Литература:
- Емельянов А. А., Бесклеткин В. В., Прокопьев К. В., Ситенков А. А., Бурхацкий В. В., Мальцев Н. В., Авдеев А. С., Габзалилов Э. Ф. Математическое моделирование системы «АИН ШИМ – АД» с транзисторными ключами // Молодой ученый. — 2016. — №12. — С. 94-103.
- Анучин А. С. Системы управления электроприводов: учебник для вузов. – М.: Издательский дом МЭИ, 2015. – 373 с.
- Шрейнер Р. Т. Электромеханические и тепловые режимы асинхронных двигателей в системах частотного управления: учеб. пособие / Р. Т. Шрейнер, А. В. Костылев, В. К. Кривовяз, С. И. Шилин. Под ред. проф. д. т. н. Р. Т. Шрейнера. – Екатеринбург: ГОУ ВПО «Рос. гос. проф.-пед. ун-т», 2008. – 361 с.
- Шрейнер Р. Т. Математическое моделирование электроприводов переменного тока с полупроводниковыми преобразователями частоты. – Екатеринбург: УРО РАН, 2000. – 654 с.
- Терёхин В. Б. Моделирование систем электропривода в Simulink (Matlab 7.0.1): учебное пособие / В. Б. Терёхин; Национальный исследовательский Томский политехнический университет. – Томск: Изд-во Томского политехнического университета, 2010. – 292 с.
- Чуев П. В. Разработка систем векторного управления асинхронными приводами на базе специализированных сигнальных микроконтроллеров: диссертация на соискание ученой степени кандидата технических наук / П.В. Чуев. – М.: Моск. энерг. ин-т (МЭИ ТУ), 2002. – 254 с.
