




Робототехника: конструирование и программирование

Автор: Чекалёва Евгения Андреевна
Рубрика: Спецвыпуск
Опубликовано в Школьная педагогика №2 (9) июнь 2017 г.
Дата публикации: 27.04.2017
Статья просмотрена: 7439 раз
Библиографическое описание:
Чекалёва, Е. А. Робототехника: конструирование и программирование / Е. А. Чекалёва. — Текст : непосредственный // Школьная педагогика. — 2017. — № 2.1 (9.1). — С. 58-63. — URL: https://moluch.ru/th/2/archive/60/2414/ (дата обращения: 27.04.2024).

Вид деятельности: познавательная
Форма: кружок
Направление воспитания: научно — техническое
Направление развития личности: общеинтеллектуальное
Пояснительная записка.
С началом нового тысячелетия в большинстве стран робототехника стала занимать существенное место в образовании любого уровня, подобно тому, как информатика появилась в конце прошлого века и потеснила обычные предметы. По всему миру проводятся конкурсы и состязания роботов для школьников и студентов: научно-технический фестиваль «Мобильные роботы» им. Профессора Е. А. Девянина с 1999 г., игры роботов «Евробот» — с 1998 г., международные состязания роботов в России — с 2002 г., всемирные состязания роботов в странах Азии — с 2004 г., футбол роботов Robocup с 1993 г. И т. д. Лидирующие позиции в области школьной робототехники на сегодняшний день занимает фирма Lego (подразделение Lego Education) с образовательными конструкторами серии Mindstorms. В некоторых странах (США, Япония, Корея и др.) при изучении робототехники используются и более сложные кибернетические конструкторы.
В последнее десятилетие значительно увеличился интерес к образовательной робототехнике. В школы закупаются новое учебное оборудование. Робототехника в образовании — это междисциплинарные занятия, интегрирующие в себе науку, технологию, инженерное дело, математику (Science Technology Engineering Mathematics = STEM), основанные на активном обучении учащихся. Во многих ведущих странах есть национальные программы по развитию именно STEM образования. Робототехника представляет учащимся технологии 21 века, способствует развитию их коммуникативных способностей, развивает навыки взаимодействия, самостоятельности при принятии решений, раскрывает их творческий потенциал. Дети и подростки лучше понимают, когда они что-либо самостоятельно создают или изобретают. Такую стратегию обучения помогает реализовать образовательная среда Лего.
Новые ФГОС требуют освоения основ конструкторской и проектно-исследовательской деятельности, и программы по робототехнике полностью удовлетворяют эти требования.
Введение дополнительной образовательной программы «Робототехника» в школе неизбежно изменит картину восприятия учащимися технических дисциплин, переводя их из разряда умозрительных в разряд прикладных. Применение детьми на практике теоретических знаний, полученных на математике или физике, ведет к более глубокому пониманию основ, закрепляет полученные навыки, формируя образование в его наилучшем смысле. И с другой стороны, игры в роботы, в которых заблаговременно узнаются основные принципы расчетов простейших механических систем и алгоритмы их автоматического функционирования под управлением программируемых контроллеров, послужат хорошей почвой для последующего освоения сложного теоретического материала на уроках. Программирование на компьютере (например, виртуальных исполнителей) при всей его полезности для развития умственных способностей во многом уступает программированию автономного устройства, действующего в реальной окружающей среде. Подобно тому, как компьютерные игры уступают в полезности играм настоящим.
Программа направлена на привлечение учащихся 5 и 6 классов к современным технологиям конструирования, программирования и использования роботизированных устройств; рассчитана на 68 часов.
Цель: обучение воспитанников основам робототехники, программирования. Развитие творческих способностей в процессе конструирования и проектирования. Создание условий для мотивации, подготовки и профессиональной ориентации школьников для возможного продолжения учебы в ВУЗах и последующей работы на предприятиях по специальностям, связанным с робототехникой.
Задачи:
- Использование современных разработок по робототехнике в области образования, организация на их основе активной внеурочной деятельности учащихся.
- Решение учащимися ряда кибернетических задач, результатом каждой из которых будет работающий механизм или робот с автономным управлением.
- Развитие мелкой моторики, внимательности, аккуратности и изобретательности, креативного мышления и пространственного воображения учащихся, формирование навыков проектного мышления, работы в команде.
Таблица 1
Учебно-тематический план
|
№ п/п |
Тема |
Количество часов |
Форма проведения |
|
5 класс |
|||
|
1 |
Введение в Робототехнику |
1 |
Теория |
|
2 |
Характеристики робота |
1 |
Теория |
|
3 |
Программирование робота |
4 |
Практика |
|
4 |
Программирование структуры |
12 |
Практика |
|
5 |
Работа с датчиками |
30 |
Теория/практика |
|
6 |
Основные виды соревнований и элементы заданий |
16 |
Подготовка к внутришкольным соревнованиям |
|
6 класс |
|||
|
1 |
Введение в Робототехнику |
1 |
Теория |
|
2 |
Работа с данными |
10 |
Теория/практика |
|
3 |
Работа с файлами. Совместная работа нескольких роботов |
8 |
Теория/практика |
|
4 |
Создание подпрограмм |
4 |
Теория/практика |
|
5 |
Продвинутое программирование движения по линии |
21 |
Подготовка к внутришкольным соревнованиям |
|
6 |
Основные виды соревнований и элементы заданий |
20 |
Подготовка к внутришкольным соревнованиям |
Содержание тем
Тема 1. Введение вРобототехнику (2 ч)
Понятие о Робототехнике Введение в науку о роботах. Основные виды роботов, их применение. Направления развития робототехники. Новейшие достижения науки и техники в смежных областях. Техника безопасности.
Тема 2. Характеристики робота (1 ч)
Краткий обзор содержимого робототехнического комплекта. Характеристики блока, сервомотора. Скорость вращения. Крутящий момент. Скорость опроса датчиков. Краткая характеристика среднего и большого сервомотора. Скорость вращения. Крутящий момент. Скорость опроса датчика. Справочные материалы. Самоучитель.
Тема 3. Программирование робота (4 ч)
Моторы. Программирование движений по различным траекториям. Конструирование экспресс-бота. Понятие сервомотор. Устройство сервомотора. Порты для подключения сервомотора. Зеленая палитра блоков(Action). Положительное и отрицательное движение мотора. Определение направления движения моторов. Блоки LargeMotorи MediumMotor (большой мотор и средний мотор). Выбор порта, выбор режима работы (включить, включить на количество секунд, включить на количество градусов, включить на количество оборотов), мощность двигателя. Выбор режима остановки мотора. Блок “Независимое управление моторами”. Блок “Рулевое управление”. Программная палитра “Дополнения”. Инвертирование вращения мотора. Нерегулируемы мотор. Инвертирование мотора.
Тема 4. Программные структуры (12 ч)
Цикл. Прерывание цикла. Цикл с постусловием. Вложенные циклы. Оранжевая программная палитра (Управление операторами). Счетчик итераций. Номер цикла. Условие завершения работы цикла. Прерывание цикла. Варианты выхода из цикла. Прерывание выполнения цикла из параллельной ветки программы. Вложенные циклы. Задания для самостоятельной работы.
Структура “Переключатель”. Если-то. Блок “Переключатель”. Переключатель на вид вкладок (полная форма, кратка форма). Дополнительное условие в структуре Переключатель. Задания для самостоятельной работы.
Тема 5. Работа сдатчиками (30 ч)
Датчик касания. Палитра программирования Датчик. Датчик касания. Внешний вид. Режим измерения. Режим сравнения. Режим ожидания. Изменение в блоке ожидания. Работа блока переключения с проверкой состояния датчика касания. Упражнения. Задания для самостоятельной работы.
Датчик цвета. Датчик цвета и программный блок датчика. Области корректной работы датчика. Режим определения цвета. Режим измерения интенсивности отраженного света. Выбор режима работы датчика. Режим измерения цвета. Выбор режима измерения цвета. Режим измерения интенсивности отраженного света. Режим измерения интенсивности окружающего света. Режим сравнения цвета. Режим калибровки. Пример выполнения режима калибровки. Режим ожидания датчика цвета. Упражнения. Задания для самостоятельной работы.
Датчик гироскоп. Датчик гироскоп и программный блок датчика. Направление вращения. Режимы работы датчика гироскоп. Упражнения. Задания для самостоятельной работы. Датчик ультразвука и программный блок датчика. Определение разброса пуска волн. Структура блока ультразвука в режиме измерения. Упражнения. Задания для самостоятельной работы.
Тема 2. Работа сданными (10 ч)
Типы данных. Проводники. Технология соединения входов и выходов блоков для передачи данных. Типы данных. Логический тип данных. Числовой тип данных. Текстовый тип данных. Массив. Числовой массив. Логический массив. Упражнения. Задания для самостоятельной работы. Переменные и константы. Работа с константами. Операции с данными. Инициализация константы. Тип константы. Значение константы. Фрагмент программы с использованием константы. Работа с переменными. Инициализация переменной. Название переменной. Значение переменной. Фрагмент программы с использованием переменной. Упражнения. Задания для самостоятельной работы.
Математические операции над данными. Блоки математики. Структура блока математики. Арифметическое действие. Результат. Примеры использования блока математики. Упражнения. Задания для самостоятельной работы.
Другие блоки работы с данными. Блок “Округление”. Блок “Сравнение”. Блок “Интервал”. Блок “Случайное значение”. Блок “Операции над массивом”. Создание массива. Запись массива в переменную. Формирование числового массива. Формирование логического массива. Режим “Длина”. Режим “Читать по индексу”. Режим “Записать по индексу”. Режим “Дополнить”. Упражнения. Задания для самостоятельной работы.
Логические операции с данными. Отрицание. Конъюнкция. Дизъюнкция. Блок логических операций. Структура блока логических операций Логические входы. Логические выходы. Таблица истинности. Примеры использования логических операций. Упражнения.
Тема 3. Работа сфайлами. Совместная работа нескольких роботов (8 ч)
Работа с файлами. Разбор фрагмента программы, демонстрирующий алгоритм работы с файлом. Работа с текстовым/числовыми файлами. Запись данных в файл. Закрытие файла. Чтение данных из файла. Фрагмент программы, демонстрирующий алгоритм работы с файлом. Упражнения. Задания для самостоятельной работы.
Блок для создания Bluetooth-соединения. Блок отравления/принятия сообщений через Bluetooth соединение. Блок для создания Bluetooth-соединения. Режимы работы блока Bluetooth-соединения. Блок отравления/принятия сообщений через Bluetooth соединение. Пример программы отправителя сообщения. Пример программы приемника сообщения. Упражнения. Задания для самостоятельной работы.
Тема 4. Создание подпрограмм (4 ч)
Подпрограмма. Понятие “Подпрограмма”. Конструктор моего блока. Создание подпрограммы с передачей входных и выходных параметров. Настройка параметров. Значки параметров. Примеры использования подпрограмм. Упражнения. Задания для самостоятельной работы.
Тема 5. Продвинутое программирование движения по линии (21 ч)
Пропорциональное линейное управление. Использование одного датчика. Использование двух датчиков. Формулы управления. Коэффициент пропорциональности. Реализация алгоритма пропорциональности управления с одним датчиком цвета. Реализация алгоритма пропорциональности управления с двумя датчиками цвета. Ручная корректировка разницы показаний датчиков. Автоматическая корректировка разницы показаний датчиков. Упражнения. Задания для самостоятельной работы.
Нелинейное управление движением по косинусному закону. Линейное управление. Нелинейное управление. Формулы косинусного управления. Управление роботом при движении по вектору. Пример программы нелинейного управления движения по косинусному закону с одним датчиком. Упражнения. Задания для самостоятельной работы.
Тема 6. Основные виды соревнований иэлементы заданий (36 ч)
Подготовка к районным соревнованиям. Знакомство с регламентом Российских соревнований по робототехнике «Hello, Robot!», в частности с видами соревнований: «Шагающий робот», «Сумо», «Кегельринг», «Кегельрингквадро», «Траектория», «Биатлон». Знакомство с различными требованиями к разным возрастным категориям. Рассмотрение слабых и сильных сторон каждого вида соревнований.
Программирование движения по линии. Варианты следования по линии. Варианты робота с одним и двумя датчиками цвета. Калибровка датчиков. Отражение светового потока при разном расположении датчика над поверхностью линии. Алгоритм ручной калибровки. Определение текущего состояния датчиков. Алгоритм автоматической калибровки. Алгоритм движения по линии “Зигзаг”(дискретная система управления). Алгоритм “Волна”. Поиск и подсчет перекрестков. Инверсная линия. Проезд инверсного участка с тремя датчиками цвета. Упражнения. Задания для самостоятельной работы.
Соревнования “Траектория”. Регламент состязаний. Соревнования роботов. Размеры робота. Вес робота. Варианты конструкций. Примеры алгоритмов. Упражнения. Задания для самостоятельной работы. Соревнования.
Подготовка к региональным соревнованиям. Знакомство с регламентом международных соревнований по робототехнике “WRO”. Знакомство с различными требованиями к разным возрастным категориям. Рассмотрение слабых и сильных сторон каждого вида соревнований. Разработка робота. Инженерная книга. Тренировка на полях. Внутренние соревнования. Подготовка. Соревнования. Результаты.
Контрольно-измерительные материалы
Итоговый тест
1. Для обмена данными между NXT или EV3 блоком икомпьютером используется…
Wi-Fi
PCI порт
WiMAX
USB порт
2. Блок NXT имеет…
3 выходных и 4 входных порта
4 выходных и 3 входных порта
3. Установите соответствие.



Рис. 1. Датчик касания. Ультразвуковой датчик. Датчик цвета
4. Блок EV3 имеет…
4 выходных и 4 входных порта
5 входных и 5 выходных порта
5. Устройством, позволяющим роботу определять расстояние до объекта иреагировать на движение является…
Датчик касания
Ультразвуковой датчик
Датчик цвета
Датчик звука
6. Сервомотор— это…
устройство для определения цвета
устройство для проигрывания звука
устройство для движения робота
устройство для хранения данных
7. Для подключения датчика кблоку EV3 требуется подсоединить один конец кабеля кдатчику, адругой…
к одному из выходных портов
оставить свободным
к одному из входных
к аккумулятору
8. Установите соответствие.



Рис. 2. сервомотор EV3; средний сервомотор EV3; сервомотор NXT
9. Какое робототехническое понятие зашифровано вребусе?

Рис. 3
ОТВЕТ:______________________________
10. Для подключения сервомотора кблоку NXT или EV3 требуется подсоединить один конец кабеля ксервомотору, адругой…
к одному из выходных портов
оставить свободным
к одному из входных
к аккумулятору
11. Полный привод— это…
Конструкция на четырех колесах и дополнительной гусеницей.
Конструкция позволяющая организовать движение во все стороны.
Конструкция, имеющая максимальное количество степеней свободы.
Конструкция, позволяющая передавать вращение, создаваемое двигателем, на все колеса.
12. Отгадайте ребус
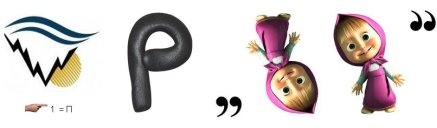
Рис. 4.
ОТВЕТ:______________________________
13. Какой параметр выделен на картинке?

Рис. 5.
Рулевое управление
Скорость
Мощность
Обороты
14. Выберите верное текстовое описание программы.

Рис. 6.
Начало, средний мотор, ожидание, средний мотор, остановить программу.
Начало, большой мотор, ожидание, большой мотор, остановить программу.
Начало, рулевое управление, таймер, рулевое управление, остановить программу.
Начало, независимое управление, время, независимое управление, остановить программу.
15. Напишите программу втекстовом варианте.
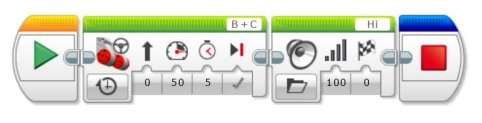
Рис. 7.
Литература:
- Курс программирования робота EV3 в среде Lego Mindstorms EV3/ Л. Ю. Овсяницкая, Д. Н. Овсяницкий, А. Д. Овсяницкий. 2-е изд., перераб. и доп — М.: Издательство «Перо», 2016. — 300 с.
- Овсяницкая, Л. Ю. Пропорциональное управление роботом Lego Mindstorms EV3 / Л. Ю. Овсяницкая, Д. Н. Овсяницкий, А. Д. Овсяницкий. — М.: Издательство «Перо», 2015. — 188 с.
- Овсяницкая, Л. Ю. Алгоритмы и программы движения робота Lego Mindstorms EV3 по линии / Л. Ю. Овсяницкая, Д. Н. Овсяницкий, А. Д. Овсяницкий. — М.: Издательство «Перо», 2015. — 168 с.
- Овсяницкий, Д. Н. Шагающий робот — Шагозавр. Серия «Ожившая механика» на базе конструктора Lego Mindstorms EV3. Инструкция по сборке / Д. Н. Овсяницкий, Л. Ю. Овсяницкая, А. Д. Овсяницкий. — Электронная книга, 2015. — 168 с.
- http://eurobot-russia.org/
- http://wroboto.ru/
- https://www.us.lego.com/ru-ru/mindstorms/support
- https://robot-help.ru/
- http://edurobots.ru/
Похожие статьи
Управление «творчеством» робота | Статья в журнале...
Основные термины (генерируются автоматически): самостоятельная работа, NXT, датчик цвета, задание, упражнение, блок, STEM, датчик касания
Lego роботы встраиваются в учебный процесс. Проводятся соревнования по робототехнике, учащиеся участвуют в.
«Робофест» как способ организации соревновательной...
Главной целью всех робототехнических соревнований является не только участие в
Как следствие, задания соревновательной робототехники порождают дух соперничества
LEGO Mindstorms NXT, снабженный входными портами для датчиков и выходными портами для...
Создание робота автономного движения по линии
То есть система должна уметь анализировать ситуацию и самостоятельно принимать решения. Именно данная цель была поставлена перед участниками соревнований по робототехнике «KubSU-robotics 2014» г
Схема алгоритма работы платы-датчика представлена на рис.4 [3].
Калибровка роботов | Статья в журнале «Молодой ученый»
Робототехника: конструирование и программирование. Датчик цвета и программный блок датчика.
Автоматическая корректировка разницы показаний датчиков. Упражнения. Варианты робота с одним и двумя датчиками цвета.
Обзор программируемого комплекта робототехники Lego
Для успешного обучения робототехнике студентов инженерно-технического профиля можно использовать робототехнический конструктор Lego Education, куда входят конструкторы Lego WeDo и Lego Mindstorms. LEGO Mindstorms NXT, снабженный входными портами для датчиков...
Системы управления с обратной связью. Выбор оптимальной...
Применение подобных алгоритмов управления используется в соревнованиях по робототехнике.
Модель данного робота представлена на рисунке 1. Буквой М обозначены моторы, кружки, закрашенные красным цветом — датчики освещённости.
Возможности использования конструктора LEGO в учебном...
6) Нажать датчик касания.
Основные термины (генерируются автоматически): LEGO, NXT, наклонная плоскость, MINDSTORMS, установка, конструктор, микропроцессорный блок, лабораторная работа, датчик касания, черная линия.
Разработка робота для транспортировки малогабаритных...
Робототехника: конструирование и программирование. Варианты робота с одним и двумя датчиками цвета.
– систематизация и обобщение знания по теме «Ветряк» в ходе конструирования модели; – умение работать с конструктором Lego Mindstorms Education NXT.
Развитие робототехники в школе | Статья в сборнике...
Проводятся соревнования по робототехнике, учащиеся
Задания разной трудности учащиеся осваивают поэтапно.
На уроках информатики решать задачи физики, математики и т.д. Модели Конструктора ПервоРобота NXT дают представление о работе механических...
Похожие статьи
Управление «творчеством» робота | Статья в журнале...
Основные термины (генерируются автоматически): самостоятельная работа, NXT, датчик цвета, задание, упражнение, блок, STEM, датчик касания
Lego роботы встраиваются в учебный процесс. Проводятся соревнования по робототехнике, учащиеся участвуют в.
«Робофест» как способ организации соревновательной...
Главной целью всех робототехнических соревнований является не только участие в
Как следствие, задания соревновательной робототехники порождают дух соперничества
LEGO Mindstorms NXT, снабженный входными портами для датчиков и выходными портами для...
Создание робота автономного движения по линии
То есть система должна уметь анализировать ситуацию и самостоятельно принимать решения. Именно данная цель была поставлена перед участниками соревнований по робототехнике «KubSU-robotics 2014» г
Схема алгоритма работы платы-датчика представлена на рис.4 [3].
Калибровка роботов | Статья в журнале «Молодой ученый»
Робототехника: конструирование и программирование. Датчик цвета и программный блок датчика.
Автоматическая корректировка разницы показаний датчиков. Упражнения. Варианты робота с одним и двумя датчиками цвета.
Обзор программируемого комплекта робототехники Lego
Для успешного обучения робототехнике студентов инженерно-технического профиля можно использовать робототехнический конструктор Lego Education, куда входят конструкторы Lego WeDo и Lego Mindstorms. LEGO Mindstorms NXT, снабженный входными портами для датчиков...
Системы управления с обратной связью. Выбор оптимальной...
Применение подобных алгоритмов управления используется в соревнованиях по робототехнике.
Модель данного робота представлена на рисунке 1. Буквой М обозначены моторы, кружки, закрашенные красным цветом — датчики освещённости.
Возможности использования конструктора LEGO в учебном...
6) Нажать датчик касания.
Основные термины (генерируются автоматически): LEGO, NXT, наклонная плоскость, MINDSTORMS, установка, конструктор, микропроцессорный блок, лабораторная работа, датчик касания, черная линия.
Разработка робота для транспортировки малогабаритных...
Робототехника: конструирование и программирование. Варианты робота с одним и двумя датчиками цвета.
– систематизация и обобщение знания по теме «Ветряк» в ходе конструирования модели; – умение работать с конструктором Lego Mindstorms Education NXT.
Развитие робототехники в школе | Статья в сборнике...
Проводятся соревнования по робототехнике, учащиеся
Задания разной трудности учащиеся осваивают поэтапно.
На уроках информатики решать задачи физики, математики и т.д. Модели Конструктора ПервоРобота NXT дают представление о работе механических...
