




Метод оптимизации модели мобильного робота для системы эволюционного моделирования
Авторы: Нго Куан Хоай, Шабалина О.А.
Рубрика: 1. Информатика и кибернетика
Опубликовано в
международная научная конференция «Технические науки в России и за рубежом» (Москва, май 2011)
Статья просмотрена: 193 раза
Библиографическое описание:
Нго, Куан Хоай. Метод оптимизации модели мобильного робота для системы эволюционного моделирования / Куан Хоай Нго, О. А. Шабалина. — Текст : непосредственный // Технические науки в России и за рубежом : материалы I Междунар. науч. конф. (г. Москва, май 2011 г.). — Москва : Ваш полиграфический партнер, 2011. — С. 17-20. — URL: https://moluch.ru/conf/tech/archive/3/698/ (дата обращения: 26.04.2024).
Эволюционные алгоритмы широко применяются на этапе конструирования мобильных роботов. В результате работы алгоритмов получаются файлы с моделями. Модель представляет собой структуру мобильного робота, которая описывается с двух точек зрения: с точки зрения кинематической структуры, с точки зрения системы управления.
Проанализировав эволюционные системы, установлено, что в модели робота существует избыточные компоненты, что приводит к следующим недостаткам:
отсутсвие средств анализа моделей;
большие временные затраты для анализа модели;
неудобство визуализации модели в пространстве.
Таким образом, с учетом выявленных недостатков, необходимо разработать иную систему для оптимизации моделей, полученных в результате работы эволюционных методов. В этой системе необходимо использовать методы оптимизации для повышения эффективности работы системы эволюционного моделирования:
разработка подсистемы анализа моделей;
минимизация количества вершин и связей;
минимизация площади изображения;
минимизация вершин, влияние которых на выходные значения не превышает заданной погрешности.
В результате работы был написан модуль, позволяющий:
визуализировать модели мобильных роботов на графе;
осуществлять "слепые" вершин (вершины, не имеющие путей к выходным вершинам);
отсечь вершины, влияние которых на выходные значения не превышает заданной погрешности.
Разработка модуля оптимизации модели мобильных роботов
В процессе автоматизированного синтеза, система выполняет три главные функции: оптимицация модели робота, визуализация модели мобильных роботов, сохранение файла после оптимизации.
В системе реализованы следующие основные функции:
Оптимицация модели робота
отсечение маловажных вершин – вершин, не имеющих путей к выходным вершинам;
отсечение вершин, влияние которых на выходные значения не превышает заданной погрешности.
Визуализация модели мобильных роботов
изображать на 2D-графике модели робота с характеристиками и изображениями и связи между ними;
изображать на матрице смежности количество связей между двумя моделями;
изображать на матрице инциденций направление связей.
Визуализация модели мобильных роботов на графе
При изображении графов чаще всего используется следующая система обозначений: каждой вершине сопоставляется точка на плоскости, и если между вершинами существует ребро, то соответствующие точки соединяются отрезком. В случае ориентированного графа отрезки заменяют стрелками.
Не следует путать изображение графа с собственно графом (абстрактной структурой), поскольку одному графу можно сопоставить не одно графическое представление. Изображение призвано лишь показать, какие пары вершин соединены рёбрами, а какие — нет. Часто на практике бывает трудно ответить на вопрос, являются ли два изображения моделями одного и того же графа или нет. В зависимости от задачи, одни изображения могут давать более наглядную картину, чем другие.
Система должна прочитать из исходных файлов список вершин и список связей, такие списки будут изображаться на матрице смежности и на матрице инциденций, после этого система должна расположить вершины и связи на графе.
Визуализация графов отображает связи между элементами роботов, т.е. на графе должен описать элементы роботов, включающие параметры, физический размер и связи между элементами — результаты присоединения.
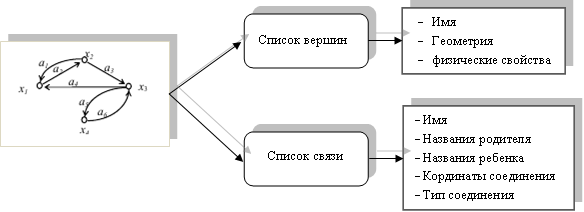
Рисунок 2 - Структура описания визуализация графов
Для визуализации графов необходимо узнать:
количество связей между двумя моделями;
н
 аправление
связей.
аправление
связей.
При решении этой задачи используются следующие способы описания графа: матрица инциденций, матрица смежности.
Графы, как правило, отображаются графически при помощи точек для представления вершин и отрезков, или ломаных, для отображения рёбер между связанными вершинами. Ориентация ребра отображается при помощи стрелки. Для каждого графа существует множество различных способов его отображения. Более конкретно, важно расположение этих вершин и рёбер, удобство восприятия, использования, стоимость создания и эстетические критерии.
Оптимизации модели робота
Дан ориентированный граф G, множество вершин которого V и множество рёбер - E. Петли и кратные рёбра допускаются. Обозначим через n – количество вершин графа, через m – количество рёбер. Требуется найти все пути между двумя заданными вершинами и отсечение вершин, не имеющих путей к выходным вершинам.
Как известно, имеет значение выбор критерия оптимальности. При решении этой задачи в зависимости от цели можно опираться на различные критерии оптимальности. Мы исследовали технические, эстетические и др. критерии. Исходя из этого, чтобы соответствовать требованиям этой задачи, мы выбрали следующие критерии:
минимизации избыточных компонентов, которые не имеют путей к выходным компонентам;
минимизация компонент, влияние которых на выходные значения не превышает заданной погрешности;
минимизация площади изображения.
В соответствии с этими критериями модуль оптимизации модели робота должен выполнять следующие функции:
отсечение "слепых" вершин
 вершин, не имеющих путей к выходным вершинам;
вершин, не имеющих путей к выходным вершинам;
отсечение вершин, влияние которых на выходные значения не превышает заданной погрешности.
Метод
отсечения
"слепых" вершин
![]() это процедура нахождения всех путей между двумя заданными вершинами.
Мы используем алгоритм поиска в ширину (обход в ширину, breadth-first
search) — это один из основных алгоритмов на графах.
это процедура нахождения всех путей между двумя заданными вершинами.
Мы используем алгоритм поиска в ширину (обход в ширину, breadth-first
search) — это один из основных алгоритмов на графах.
Алгоритм работает за O(n + m), где n— число вершин, m— число рёбер.
На вход алгоритма подаётся заданный граф и номер стартовой вершины s. Граф может быть как ориентированным, так и неориентированным, для алгоритма это не важно.
Сам алгоритм можно понимать как процесс "поджигания" графа: на нулевом шаге поджигаем только вершину s. На каждом следующем шаге огонь с каждой уже горящей вершины перекидывается на всех её соседей; т.е. за одну итерацию алгоритма происходит расширение "кольца огня" в ширину на единицу (отсюда и название алгоритма).
Более
строго это можно представить следующим образом. Создадим очередь
![]() ,
в которую будут помещаться горящие вершины, а также заведём булевский
массив used[],
в котором для каждой вершины будем отмечать, горит она уже или нет
(или иными словами, была ли она посещена).
,
в которую будут помещаться горящие вершины, а также заведём булевский
массив used[],
в котором для каждой вершины будем отмечать, горит она уже или нет
(или иными словами, была ли она посещена).
Изначально
в очередь помещается только вершина
![]() ,
и used[s]
= true,
а для всех остальных вершин used[s]
= false.
Затем алгоритм представляет собой цикл: пока очередь не пуста,
достать из её головы одну вершину, просмотреть все рёбра, исходящие
из этой вершины, и если какие-то из просмотренных вершин ещё не
горят, то поджечь их и поместить в конец очереди.
,
и used[s]
= true,
а для всех остальных вершин used[s]
= false.
Затем алгоритм представляет собой цикл: пока очередь не пуста,
достать из её головы одну вершину, просмотреть все рёбра, исходящие
из этой вершины, и если какие-то из просмотренных вершин ещё не
горят, то поджечь их и поместить в конец очереди.
В результате поиска в ширину находятся все пути между двумя заданными вершинами в ориентированом графе.
|
|
|
Рисунок 4 – Метод отсечения "слепых" вершин
Литература:
Робототехника [Электронный ресурс]. – 2006. – Режим доступа: http://www.prorobot.ru/12/robot-it-is.php
Робот [Электронный ресурс]. – 2008. – Режим доступа: http://ru.wikipedia.org/wiki/%D0%A0%D0%BE%D0%B1%D0%BE%D1%82
Робот для программиста [Электронный ресурс]. – 2007. – Режим доступа: http://robot.paccbet.ru/robot_for_programmer.php.htm
Алгоритм поиска пути для роботов [Электронный ресурс]. – 2007. – Режим доступа: http://robot.paccbet.ru/robot_path.php.htm
Финн, В.К. Правдоподобные выводы и правдоподобные рассуждения / В.К.Финн. – М.: ВИНИТИ, 1988. - Т. 28. – 180 с. – (Итоги науки и техники. Сер. «Теория вероятностей. Математическая статистика. Теоретическая кибернетика»).
Искусственный интеллект. В 3 т. Т. 2. Модели и методы: справочник/ под ред. Д. А. Поспелова. – М.: Радио и связь, 1990. – 304 с.
Похожие статьи
вершина, заданная погрешность, модель робота, граф...
Метод оптимизации модели мобильного робота для системы... вершина, заданная погрешность, модель робота, граф, выходной, отсечение вершин, матрица смежности, визуализация модели, визуализация графов, путь.
вершина, заданная погрешность, модель робота, граф...
Метод оптимизации модели мобильного робота для системы... вершина, заданная погрешность, модель робота, граф, выходной, отсечение вершин, матрица смежности, визуализация модели, визуализация графов, путь.
Демонстрационная компьютерная модель «Обход графов»
Оптимизация и визуализация модели мобильного робота на графе.
Подграфы, операции над графами. Формировать умение строить плоскую укладку графа так, чтобы заданное ребро (вершина, грань) принадлежали внешней грани.
Занятие «Раскраски графов» факультативного курса «Элементы...
Матричный метод расчетов динамических рекуррентных... Из теории графов следует; если столбец матрицы смежности нулевой (рис.1а), то вершина сигнального графа является стоком, а.
Графы в Scilab | Статья в сборнике международной научной...
Если граф имеет n вершин и m дуг, то массивы будут иметь следующие размеры: lp — размер n+1, ls и la — размер m. При таком способе
Рис. 3. Список смежности графа из примера. Кроме того, возможно и представление графов матрицами инцидентности и смежности.
Поиск гамильтоновых циклов и цепей в кубических графах
Обозначим через матрицу смежности графа, если существует ребро, соединяющее вершину и вершину
На рис.1,2 изображен кубический неориентированный 8-вершинный граф и соответствующая ему матрица смежности.
Один способ генерации графа | Статья в журнале...
Предложенная модель графа хороша именно этим: высокие показатели
Граф, конечно же, нужно было хранить в списке смежности, так как эта структура сочетает в
Вершина включает в себя ее название и список дуг. Ну и, самое большое, граф — состоит из списка вершин.
Алгоритмические аспекты доминирования в графах
Задача отыскания наименьшего доминирующего множества вершин неориентированного графа G соответствует ЗНП с матрицей P, в качестве которой выступает матрица смежности графа G с единичными элементами на главной диагонали.
Двухфазный алгоритм решения задачи о клике для разреженных...
Граф G′ = (V′, E′) называется подграфом графа G = (V, E) при условии, что V′ ⊆V, E′ ⊆E. Если множество вершин подграфа G′ есть V′, а множество ребер E′ совпадает с множеством всех ребер графаG, оба конца
Метод оптимизации модели мобильного робота для системы...
Похожие статьи
вершина, заданная погрешность, модель робота, граф...
Метод оптимизации модели мобильного робота для системы... вершина, заданная погрешность, модель робота, граф, выходной, отсечение вершин, матрица смежности, визуализация модели, визуализация графов, путь.
вершина, заданная погрешность, модель робота, граф...
Метод оптимизации модели мобильного робота для системы... вершина, заданная погрешность, модель робота, граф, выходной, отсечение вершин, матрица смежности, визуализация модели, визуализация графов, путь.
Демонстрационная компьютерная модель «Обход графов»
Оптимизация и визуализация модели мобильного робота на графе.
Подграфы, операции над графами. Формировать умение строить плоскую укладку графа так, чтобы заданное ребро (вершина, грань) принадлежали внешней грани.
Занятие «Раскраски графов» факультативного курса «Элементы...
Матричный метод расчетов динамических рекуррентных... Из теории графов следует; если столбец матрицы смежности нулевой (рис.1а), то вершина сигнального графа является стоком, а.
Графы в Scilab | Статья в сборнике международной научной...
Если граф имеет n вершин и m дуг, то массивы будут иметь следующие размеры: lp — размер n+1, ls и la — размер m. При таком способе
Рис. 3. Список смежности графа из примера. Кроме того, возможно и представление графов матрицами инцидентности и смежности.
Поиск гамильтоновых циклов и цепей в кубических графах
Обозначим через матрицу смежности графа, если существует ребро, соединяющее вершину и вершину
На рис.1,2 изображен кубический неориентированный 8-вершинный граф и соответствующая ему матрица смежности.
Один способ генерации графа | Статья в журнале...
Предложенная модель графа хороша именно этим: высокие показатели
Граф, конечно же, нужно было хранить в списке смежности, так как эта структура сочетает в
Вершина включает в себя ее название и список дуг. Ну и, самое большое, граф — состоит из списка вершин.
Алгоритмические аспекты доминирования в графах
Задача отыскания наименьшего доминирующего множества вершин неориентированного графа G соответствует ЗНП с матрицей P, в качестве которой выступает матрица смежности графа G с единичными элементами на главной диагонали.
Двухфазный алгоритм решения задачи о клике для разреженных...
Граф G′ = (V′, E′) называется подграфом графа G = (V, E) при условии, что V′ ⊆V, E′ ⊆E. Если множество вершин подграфа G′ есть V′, а множество ребер E′ совпадает с множеством всех ребер графаG, оба конца
Метод оптимизации модели мобильного робота для системы...




