Школьник понимает физический опыт только тогда хорошо, когда делает его сам. Но ещё лучше он понимает его, если сам делает прибор для эксперимента
П. Л. Капица
Под системой следует понимать комплекс взаимосвязанных компонентов (элементов и устройств), имеющих единое управление. Модель (в науке и технике) представляет собой упрощённый объект, сохраняющий свойства существующего объекта или системы, и предназначенный для их изучения, т. е. его упрощённое представление.
Сегодня широкое применение в системах освещения находят светодиодные светильники и ленты. Однако, применяемый блок управления является закрытой системой, не позволяющей продемонстрировать принцип работы отдельных устройств и всей модели. В то время как демонстрация принципа работы устройств при изучении предметов, возможность самостоятельно создавать проекты, повышает интерес к изучению дисциплины и способствует улучшению качества обучения.
Целью работы являлось создание модели системы освещения на базе открытых аппаратных платформ и свободных программных средств. Результатом работы стала материальная полезная модель элементов системы освещения, в процессе разработки которой формируются умения и навыки создания принципиальных схем, программирования устройств.
При обучении целесообразно краткое ознакомление с основами электротехники, среды разработки ArduinoIDE, основ программирования на языке С++. Навыки программирования необходимы для управления устройствами в проекте.
В качестве управляющего устройства в проектах применяется микропроцессор ArduinoUno, используемый для построения простых систем автоматики и робототехники, ориентированных на непрофессиональных пользователей. Аппаратная часть представляет собой набор смонтированных печатных плат. Интерес представляет полностью открытая архитектура системы, позволяющая использовать различные типы датчиков, источников света, электромоторов, применять легко осваиваемое программное обеспечение.
Программная часть состоит из программной оболочки (IDE) для написания программ, их компиляции и программирования аппаратуры. Язык программирования устройств Ардуино основан на C/C++. Кросс-платформенность программного обеспечения Arduino позволяет работать под ОС Windows, Macintosh OSX и Linux.
Макетная плата используется для быстрой сборки электрических схем без пайки.
Для реализации модели системы необходимы комплектующие, приведенные в таблице 1.
Таблица 1
Комплектующие модели системы освещения
|
Наименование |
Количество |
|
Микроконтроллер Arduino Uno |
1 |
|
Макетная плата |
1 |
|
Перемычки (комплект) |
1 |
|
Блок питания (9–12 V) |
1 |
|
Резистор 220 Ом |
3 |
|
Транзистор полевой MOSFЕT |
3 |
|
Ультразвуковой дальномер |
1 |
|
Bluetooth — модуль HC-06 |
1 |
|
Светодиодная лента RGB |
1м |
Для реализации модели принципиальная схема подключения устройств и схема на макетной плате разработаны авторами с помощью программы Fritzing.
Обучающимся согласно принципиальной схеме необходимо собрать устройство на макетной плате, а затем загрузить готовый скетч. Можно предложить разработать программный код самостоятельно. Этим достигается реализация разноуровневого подхода в обучении с применением модели в качестве обучающего материала для разных возрастов и уровня подготовки. Реализации задачи предшествует создание отдельных проектов подключения и программирования используемых устройств.
Для интеграции в модель системы выбраны элементы: светодиодная лента, ультразвуковой дальномер и Bluetooth — модуль. Приведем их краткое описание.
Ультразвуковой дальномер HC-SR04 (рис.1.) предназначен для измерения расстояния от устройства до объекта. Посылая пучок ультразвуковых сигналов, сенсор определяет расстояние по задержке отраженного сигнала.
Bluetooth — модуль применяется для дистанционного управления Аrduino платой с компьютера или смартфона, обмена данными с другими bluetooth–устройствами: пересылки показаний сенсоров. В проекте применяется модуль HC-06 (рис. 2.).

Рис. 2. Ультразвуковой дальномер
Рис. 3. Bluetooth — модуль
Светодиодная лента — универсальный источник света, гибкая печатная плата с прикрепленными светодиодами и резисторами. Благодаря легкости монтажа, возможности регулирования интенсивности освещения и цветового решения, безопасности, экономичности светодиодная лента находит широкое применение в шоу, костюмах, рекламе, интерьере, автомобилях.
В цифровых светодиодных лентах к каждому светодиоду дополнительно устанавливается микросхема, что делает возможным управлять каждым светодиодом. В аналоговых лентах светодиоды включены в параллель. Следовательно, можно задавать цвет всей светодиодной ленты, но нельзя установить определенный цвет для конкретного LED. Эти ленты просты в подключении и не дорогие, поэтому применяем именно аналоговую ленту (рис. 4).

Рис. 4. RGB-лента
Разработано два режима работы светодиодной ленты в зависимости от сигнала, передаваемого на Bluetooth — модуль из Android-приложения («1» или «2»).
Режим «1». Работает ультразвуковой дальномер и RGB лента совместно, по мере приближения объекта отключая один цвет из трех.
Режим «2», RGB-лента изменяет цвет каждые 10 секунд, создавая радужный эффект.
Схема сборки на макетной плате представлена на рисунке 5. На рисунке 6 приведена принципиальная схема подключения устройств модели. Для передачи данных на Bluetooth — модуль с Android-устройства используется приложение Bluetooth SSP-unWired являющееся свободно распространяемой программой.
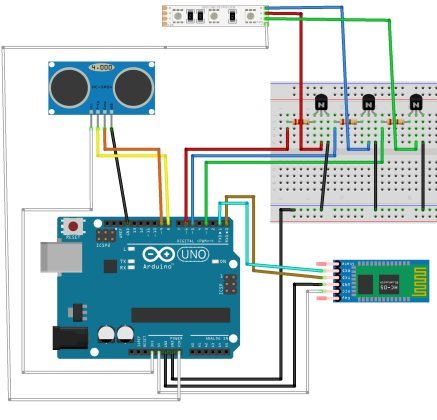
Рис. 5. Схема подключения устройств модели
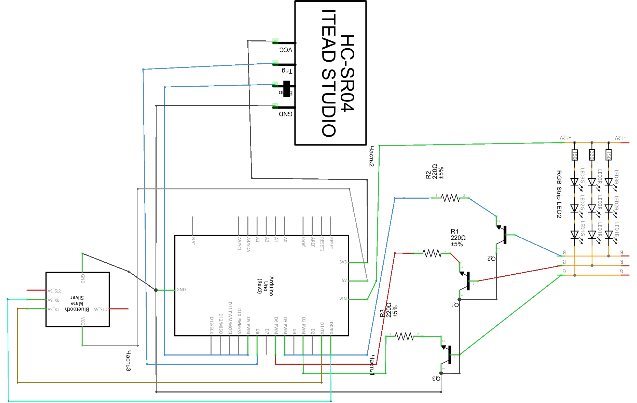
Рис. 6. Принципиальная электрическая схема систем
Программный код работы Arduino:
charcommand;
String string;
const int Trig = 8;
const int Echo = 9;
const int Red=6;
const int Blue=5;
const int Green=3;
void setup()
{ Serial.begin(9600);
pinMode(Red, OUTPUT);
pinMode(Blue, OUTPUT);
pinMode(Green, OUTPUT);
pinMode(Trig, OUTPUT);
pinMode(Echo, INPUT); }
unsigned int time_us=0;
unsigned int distance_sm=0;
void loop()
{ if (Serial.available() > 0)
{string = "";} while(Serial.available() > 0)
{ command = ((byte)Serial.read());
if(command == ':')
{ break; }
else {string += command; }
delay(1); }
if(string == "1")
{ Function1(); }
if(string =="2")
{Function2();} }
void Function1()
{ { {
digitalWrite(Trig, HIGH); // Подаем сигнал на выход микроконтроллера
delayMicroseconds(10); // Удерживаем 10 микросекунд
digitalWrite(Trig, LOW); // Затем убираем
time_us=pulseIn(Echo, HIGH); // Замеряем длину импульса
distance_sm=time_us/58; // Пересчитываем в сантиметры
Serial.println(distance_sm); // Выводим на порт
if (distance_sm<50) // Если расстояние менее 50 сантиметром
{ digitalWrite(Red, 1); // Зажигаем светодиод }
else {
digitalWrite(Red, 0); // иначе тушим
} }
{ if (distance_sm<25) // Если расстояние менее 25 см
{ digitalWrite(Blue, 1);
// Зажигаем светодиод
}
else
{ digitalWrite(Blue, 0); // иначе тушим
} }
{ if (distance_sm<10)
// Если расстояние менее 10 см
{ digitalWrite(Green, 1);
// Зажигаем светодиод }
else
{ digitalWrite(Green, 0); // иначе тушим }
}} }
void Function2()
{ int r, g, b;
// fade от голубого к фиолетовому
for (r = 0; r < 256; r++) {
analogWrite(Red, r);
delay(10); }
// fade от фиолетового к красному
for (b = 255; b > 0; b--) {
analogWrite(Blue, b);
delay(10); }
// fade от красного к желтому
for (g = 0; g < 256; g++) {
analogWrite(Green, g);
delay(10); }
// fade от желтого к зеленому
for (r = 255; r > 0; r--) {
analogWrite(Red, r);
delay(10); }
// fade от зеленого к зеленовато-голубому
for (b = 0; b < 256; b++) {
analogWrite(Blue, b);
delay(10); }
// fade от зеленовато-голубого к голубому
for (g = 255; g > 0; g--) {
analogWrite(Green, g);
delay(10);
}}
Новизна проекта, его отличие от прототипов и аналогов заключается в подборе наиболее понятных в работе и в то же время эффектных в восприятии устройств. Создание действующей модели в процессе изучения отдельных предметов: элементов физики и электротехники, программирования, робототехники и ее применение в качестве наглядного пособия улучшает формирование межпредметных связей, способствует формированию преемственности инженерного образования на разных ступенях обучения, создает условия технического творчества обучающихся.
Практическая значимость проекта заключается в использовании модели в процессе обучения, а практическое применение модели — в использовании ее на профориентационных выставках учебного заведения, при проведении мастер-классов по привлечению абитуриентов.
Литература:
- Блюм Джереми. Изучаем Arduino: Инструменты и методы технического волшебства — СПб.: БХВ-Петербург, 2015. — 336 с.
- Литвиненко Н. А.. Технология программирования на С++. Учебное пособие. — СПб.: БХВ-Петербург, 2010. — 281 с.
- Платт Чарльз. Электроника для начинающих — СПб.: БХВ-Петербург, 2012. — 480 с.
- Arduino-проекты // ArduinoTV. URL: http://arduino-tv.ru/catalog/tag/arduino
- Схема подключения многоцветной ленты // Светодиодная лента для подсветки. URL: http://led-lenta.ru/shema-podklyucheniya-rgb-svetodiodnoj-lenty.htm
- Светодиодные ленты и коннекторы // Navigator. URL: http://www.navigator-light.ru/products/lamps/542.html

