Рассмотрение вопросов выбора микроконтроллера для построения цифрового импульсного преобразователя напряжения.
1. Введение
Прежде, чем обращаться к современности, важно вспомнить, с чего начиналась история создания цифровых источников питания и как, начиная с ранних исследовательских работ, которые выполнили в середине 1970-х годов Трэй Бёрнс (Trey Burns), Н. Р. Миллер (N. R. Miller) и другие, этот тип источников питания постепенно занял свою нишу в отрасли и достиг того уровня, при котором для конструктора имеет смысл использовать данную технологию. Экспериментальное устройство, построенное тогда Бёрнсом, представляло собой повышающий преобразователь, работающий на частоте переключения 100 Гц. На первый взгляд, это, конечно, медленно, но такая медлительность была вынужденной, поскольку выполнение цифровой программы занимало до 450 мкс на одну выборку. В роли цифрового контроллера выступал мини-компьютер PDP-11/45, а повышающий преобразователь был построен на основе катушки с разрезным П-образным сердечником (очень громоздким и тяжелым) индуктивностью 10 мГн и конденсатора емкостью ≈13 000 мкФ. Исследовательская группа прикатила устройство к компьютеру на тележке.
2. Микроконтроллер
Как и в других отраслях, разработка новой технологии всегда порождает новые потребности, диктуя необходимость в выработке новых способов организации работы и стандартизации. Развитие цифровых ШИМ-контроллеров требовало связи с пользователем и наличие специального протокола.
В мае 2004 г. компании Artesyn Technologies и Astec Power совместно с группой поставщиков полупроводниковых компонентов (Texas Instruments, Volterra Semiconductors, Microchip Technology, Summit Microelectronics и Zilker Labs) создали коалицию для разработки открытого стандарта на коммуникационный аппарат и протокол, специально предназначенные для систем питания. Так появился стандарт под названием PMBus. По состоянию на конец 2007 г. в состав организации «PMBus Implementers Forum» (PMBus-IF) входило свыше 30 организаций, ставящих перед собой задачу обеспечивать поддержку этой технологии и способствовать ее внедрению. Компания «Texas Instruments» в линейки цифровых ШИМ-контроллеров «Fusion Digital Power» применяет только линию связи PMBus.
Несмотря на наличие шины PMBus с помощью, которой управляется цифровой ШИМ-контроллером, добавление собственных алгоритмов, чтение дополнительных параметров с внешних устройств является не доступным. Это накладывает ряд ограничений и порождает создание собственных разработок. Одним из решений может стать применение микроконтроллеров.
Необходимость собственных разработок обусловлена следующими причинами:
- импортозамещение,
- сложность источников питания,
- перенос кода на новые микросхемы.
Импортозамещение является на сегодняшний день первоочередной задачей особенно в военной отрасли. Из отечественных производителей микроконтроллеров можно выделить ОАО «НИИЭТ» и ЗАО «ПКК Миландр». Данными производителями налажен выпуск аналогов микроконтроллеров ведущих фирм таких как «Atmel Corporation», «Microchip Technology Inc», «STMicroelectronics». ОАО «НИИЭТ» и ЗАО «ПКК Миландр» могут поставлять свои изделия с приемкой заказчика («5»). Температурные режимы работы микросхем ориентированы на Российские требования от минус 60 до плюс 125 градусов по Цельсию, керамический корпус, позволяющий применять продукцию в космическом аппарата строении.
Сложность источников питания обусловлена растущими к ним требованиям. К основной функции это преобразование входного напряжения в заданное с последующей стабилизацией, добавляются функции:
- контроля напряжений и потребляемого тока,
- дистанционное включение/выключение преобразователя,
- включение/выключение выходных каналов по требованию,
- контроль температуры изделия,
- ведение log-файлов,
- наличие канала связи с другими устройствами, на случай пропадания входной сети. Функция «Hold up time»,
- наличие канала связи с пользователем.
Дополнительные функции требуют от разработчика установки микроконтроллера в преобразователь напряжения. Это приводит к удорожанию конечного изделия в следствии повышения сложности печатной платы при высокой плотности размещения компонентов и плотности монтажных соединений.
Одна из проблем являющаяся всегда острой, замена управляющих микросхем преобразователя при прекращении ее производства. Замену всегда можно найти, прогресс не стоит на месте. Ежегодно ведущие производители ШИМ-контроллеров предлагают массу новинок. Они могут превосходит своих предшественников по характеристикам, но также отличаться корпусом так, как тенденция минимизации присутствует везде. Следствием минимизации является изменение габаритных размеров корпуса, количество выводов микросхемы, то есть меняется тип корпуса и посадочное место на печатной плате. Все это приводит к новым расчетам электрической схемы, трассировки печатной платы и выпуску технической документации или изменений существующей. Цифровые преобразователи под управлением микроконтроллера отчасти лишены некоторых этих проблем, перенос алгоритма управления может быть осуществлен по средствам подключаемых библиотек. Это не только сокращает время модернизации, но и сокращает экономические затраты на изделие.
3. Аналого-цифровой преобразователь, генератор аналоговых сигналов
Цифровой преобразователь напряжения требует наличия у микроконтроллера:
- аналого-цифровой преобразователь (АЦП),
- генератор аналоговых сигналов (ШИМ).
Согласно выше перечисленным требований, то большинство современных микроконтроллеров подойдет для построения цифрового преобразователя стабилизированного напряжения. Но качество стабилизация выходного напряжения ограничивает количество применяемых микроконтроллеров. Рассмотрим принцип работы цифровой стабилизации выходного напряжения понижающего преобразователя, рисунок 1.
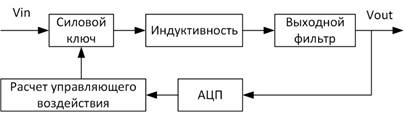
Рис. 1. Блок-схема цифрового преобразователя напряжения
Аналого-цифровой преобразователь представляет собой устройство для автоматического преобразования непрерывно имеющихся во времени аналоговых величин в эквивалентные значения числовых кодов. С вывода « », величина напряжения поступает на вход АЦП напрямую, или через гальваническую развязку, или через резисторный делитель напряжения. Первая погрешность, влияющая на преобразование это точность резисторов, чем меньше процентность резисторов, тем ближе величина напряжения на выходе резисторного делителя будет к расчетным данным.
», величина напряжения поступает на вход АЦП напрямую, или через гальваническую развязку, или через резисторный делитель напряжения. Первая погрешность, влияющая на преобразование это точность резисторов, чем меньше процентность резисторов, тем ближе величина напряжения на выходе резисторного делителя будет к расчетным данным.
Процесс аналого-цифрового преобразования сигнала «» состоит из процессов квантования во времени и дискретизации по уровню. Принцип преобразования поясняется на рисунке 2:
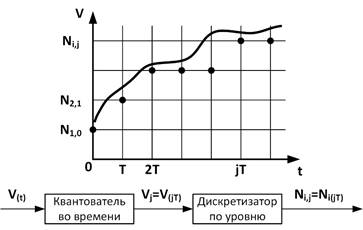
Рис. 2. Блок схема квантования сигнала «»
Квантователь во времени преобразует входной сигнал «» в последовательность выборок этого сигнала « » в моменты времени «
» в моменты времени « ». Дискретизатор по уровню превращает эту последовательность в последовательность кодов «
». Дискретизатор по уровню превращает эту последовательность в последовательность кодов « », где индекс «i» соответствует «i»-му уровню, а индекс «j» –моменту времени «».
», где индекс «i» соответствует «i»-му уровню, а индекс «j» –моменту времени «».
Квантование(англ. sampling) состоит в том, что аналоговый сигнал заменяется последовательностью его значений в дискретные моменты времени. В цифровых системах присутствует два типа квантования: квантование по времени и квантование по уровню.
Квантование по уровню связано с тем, что АЦП имеет конечное число двоичных разрядов (чаще всего от 8 до 16). Это значит, что на выходе АЦП можно получить только ограниченное число различных кодовых значений (256 для 8-разрядного АЦП и 65536 для 16-разрядного). Поэтому при квантовании значения входного сигнала искажаются. Это является второй основной погрешностью, которую необходимо учитывать при расчетах.
Рассмотрим на примере. На вход АЦП поступает сигнал «» с максимальной величиной +2,56В, это величина опорного напряжения. Работа любого АЦП не возможна без источника опорного напряжения (ИОН). ИОН подразделяются на два типа: внутренний и внешний.
При 10-разрядном АЦП, точность измерений будет равна:
 (1)
(1)
При 16-разрядном АЦП, точность измерений будет равна:
 (2)
(2)
Сравнивая результаты, полученные в формулах (1), (2) можно сделать вывод, что при построении цифрового преобразователя напряжения величина разрядности АЦП влияет на точность вычисления управляющего воздействия.
Абсолютная точность АЦП — отклонение реального преобразования от идеального. Это составной результат нескольких погрешностей АЦП. Выражается в количестве младших значащих разрядов (LSB — least significant bit) АЦП. Максимальная абсолютная погрешность АЦП микроконтроллера «Atmega8» равна 1.5 LSB. Вычислим абсолютную погрешность для 10-разрядного АЦП микроконтроллера «Atmega8»:
 (3)
(3)
Предельная частота дискретизации определяет быстродействие АЦП и измеряется в герцах или количестве выборок в секунду (SPS — samples per second). Например у микроконтроллера «Atmega8» эта величина равна 15 kSPS (килло семплов в секунду). Увеличение частоты дискретизации приведет к ухудшению точности результата преобразования АЦП.
Генератор аналоговых сигналов микроконтроллера, в зависимости от требуемой частоты аналогового сигнала, требуемого разрешения и типа используемого микроконтроллера, есть несколько способов получения его. Непосредственно на микроконтроллере с помощью широтно-импульсной модуляции (ШИМ), используя функционал аппаратных таймеров или программную реализацию, с помощью встроенного цифроаналогового преобразователя (ЦАП). С помощью внешних схем цифроаналоговых преобразователей на дискретных элементах или с помощью внешних микросхем цифроаналоговых преобразователей. Самым экономически выгодным способом получения генерации аналогового сигнала является ШИМ микроконтроллера, так как экономится место на печатной плате. Современные микроконтроллеры имеют высоко разрядный встроенный ШИМ-генератор.
Рассмотрим, как работа цифрового преобразователя напряжения зависит от ШИМ’а. Микроконтроллер получает данные о величине выходного напряжения от АЦП. Согласно записанного в памяти алгоритма управления, микроконтроллер производит расчет величины управляющего воздействия, которая выражается во времени открытого состояния силового ключа. Значение управляющего воздействия необходимо записать в соответствующий регистр. Таким образом на выходе микроконтроллера должен получиться ШИМ-сигнал равный величине управляющего воздействия. Если установленное значение ШИМ будет отличаться от расчетного, то возникнет погрешность в виде отклонения выходного напряжения от желаемого. Не соответствие выходного напряжения увеличит значение ошибки и согласно алгоритму управления величина управляющего воздействия пере рассчитается. В результате на осциллограмме можно будет наблюдать не стабильное выходное напряжения. Причина этому является не достаточное разрешение или минимальный шаг разрешения ШИМ-сигнала. Рассчитаем минимальный шаг изменения аналогового сигнала 8-разрядного счетчика ШИМ:
 (4)
(4)
где  — максимальная амплитуда аналогового сигнала (В); n — разрядность счетчика реализующего ШИМ.
— максимальная амплитуда аналогового сигнала (В); n — разрядность счетчика реализующего ШИМ.
Из формулы (4) следует, если значение управляющее воздействие не будет кратно шагу счетчика ШИМ-сигнала, то установиться ближайшее значение кратное шагу счетчика и время открытого состояние ключа не будет соответствовать расчетному, что приведет к увеличению ошибки.
Любой импульсный преобразователь напряжения характеризуется частотой работы силового ключа. В цифровом преобразователе напряжения частота работы силового ключа зависит от микроконтроллера. Частота ШИМ сигнала будет определяться как:
 (5)
(5)
где  — тактовая частота микроконтроллера (Гц),
— тактовая частота микроконтроллера (Гц),
K — коэффициент предделителя счетчика,
n — разрядность счетчика.
Например, тактовая частота микроконтроллера 8 МГц, коэффициент предделителя равен 8, разрядность счетчика 8 бит. Тогда частота выходного ШИМ сигнала будет равна:
 (6)
(6)
На основе формул (5) и (6) можно видеть зависимость качества ШИМ-сигнала от тактовой частоты микроконтроллера и разрядности счетчика. Современные микроконтроллеры могут тактироваться от внешнего или от встроенного RC-генератора. Существует несколько видов внешних генераторов, предпочтительно применять внешний кварцевый резонатор, так как его точность составляет 0,02 %. Внешний кварцевый резонатор позволяет обеспечить устойчивую работу микроконтроллера при перепадах температуры окружающей среды.
4. 8 или 32 разряда
В последние годы наблюдается активный переход разработчиков встраиваемых систем на использование 32-разрядной архитектуры. Самой важной причиной движения в сторону 32-разрядных микроконтроллеров является усложнение встраиваемых устройств под влиянием требований рынка. Так как встраиваемые продукты становятся все более функционально насыщенными, 8- и 16-разрядные МК не позволяют обеспечить требуемую производительность. Даже если 8- и 16-разрядные МК отвечают требованиям сегодняшних проектов, возможности дальнейшей модернизации таких устройств и повторного использования программного кода в будущих разработках уменьшаются.
Вторая причина преимущества 32-разрядных микроконтроллеров является несомненное превосходство в производительности. Цифровой преобразователь напряжения должен быстро выполнять расчеты не только управляющего воздействия по напряжения, но также:
- режим контроля потребляемого тока,
- иметь несколько выходных каналов на различные напряжения,
- отрабатывать аварийный режим по каждому из каналов,
- выполнять расчет окружающей температуры, времени работы от аккумуляторной батареи,
- вести лог-файл.
- передавать информацию о состоянии пользователю
Все выше перечисленное требует большой производительности от МК. Например, увеличение времени задержки расчета управляющего воздействия на силовой ключ может привести к повышения выходного напряжения при котором потребитель может выйти из строя. Причиной задержкой может стать разрядность МК. Многие команды 8-разрядных МК имеют разрядность 16, 24 бит или другую, например, микроконтроллер PIC18 имеет длину команд 16 бит. ARM-процессоры Cortex-M3 и Cortex-M0 основаны на технологии Thumb-2, которая обеспечивает превосходную плотность кода. Данная технология поддерживает набор команд Thumb, который включает 16-битные команды, а также 32-битные команды. Поэтому 32-разрядный МК затратит один такт на 16-битную операцию, чего не сможет 8-разрядный МК.
5. Заключение
В первой части статьи «Цифровые импульсные преобразователя напряжения под управлением микроконтроллера» были рассмотрены основные вопросы, которыми надо руководствоваться при выборе МК для построения преобразователя напряжения. Во второй части статьи будут показаны плюсы и минусы применения 8 и 32-разрядных микроконтроллеров различных ведущих производителей.
Литература:
1. К. Ю. Поляков «Основы теории цифровых систем управления», 2006г
2. В. В. Григорьев, С. В. Быстров, В. И. Бойков, Г. И. Болтунов, О. К. Мансурова «Цифровые системы управления»,2011г
3. Benjamin C.Kuo «Digital Control Systems»
4. http://www.st.com
5. http://www.atmel.com
6. http://www.ti.com
7. http://www.milandr.ru
8. http://www.niiet.ru

