Проведен анализ взаимодействия волн различных локаторов с атмосферой при распространении в ней; приведено обоснование реализации системы предупреждения столкновений автомобилей (СПСА) с использованием СВЧ –локатора; предложена структурная схема системы предупреждения столкновений автомобилей; разработана структурная схема и алгоритм работы процессора системы СПСА
Ключевые слова: система предупреждения столкновений автомобилей, оптический диапазон электромагнитных волн, устройство технического зрения, СВЧ — локаторы, ультразвуковые локаторы, лазерные локаторы, инфракрасные дальномеры, дальность, скорость сближения, интенсивность поглощения электромагнитных волн, звуковые и акустические волны, коэффициент затухания ЭМВ оптического диапазона
В настоящее время ведутся интенсивные разработки систем предупреждения столкновений автомобилей (СПСА). И хотя на некоторых автомобилях уже установлены некоторые элементы систем предупреждения столкновений, проблема разработки совершенной СПСА еще далека от решения.
Из анализа разработок систем предупреждения столкновений автомобилей (СПСА) следует, что их общим недостатком является использование оптического диапазона электромагнитных волн в качестве носителя информации.
Для обеспечения работы СПСА должна получать информацию об объектах возможного столкновения. Поэтому одним из устройств СПСА должно быть устройство технического зрения.
Структурную схему СПСА можно представить в следующем виде (рис. 1).

Рис. 1 Структурная схема СПСА
В качестве устройства технического зрения возможно применение различных локаторов, например:
- СВЧ — локаторы (радары);
- ультразвуковые локаторы (сонары);
- лазерные локаторы (лидары);
- инфракрасные дальномеры (ТВИК).
Следовательно, электромагнитные волны оптического диапазона применяются в лазерах и инфракрасных устройствах; акустические волны — в ультразвуковых локаторах; электромагнитные волны диапазона УКВ применяются в радарах.
Поскольку задачей устройства технического зрения СПСА является распознавание дорожной обстановки: обнаружить объект, определить до него дальность Доб и скорость сближения Vсбл, необходимо проанализировать взаимодействие соответствующих волн с атмосферой при распространении в ней.
Известно, что при распространении в атмосфере электромагнитных и акустических волн происходит их ослабление. Ослабление происходит в результате поглощения и рассеивания.
Ослабление излучения подчиняется экспоненциальному закону:
 (1)
(1)
где: Io — интенсивность излучения до ослабления;
I — интенсивность излучения после ослабления;
α — коэффициент ослабления, км-1;
R — дальность, км.
Поэтому при разработке локатора СПСА необходимо учитывать особенности распространения волн в атмосфере.
Интенсивность поглощения электромагнитных волн зависит от длины волны.
На рис. 2 показана зависимость прозрачности атмосферы от длины волн электромагнитного излучения.
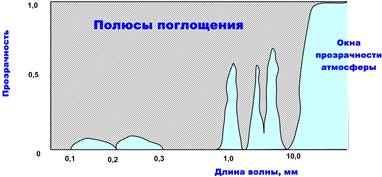
Рис. 2 Зависимость прозрачности атмосферы от длины волны ЭВИ
Как видно из диаграммы в атмосфере есть так называемые «окна прозрачности», где затухание имеет минимальное значение. Это обстоятельство необходимо учитывать при выборе длины волны радара.
Звуковые или акустические волны представляют собой упругие колебания воздушной среды. Принято считать, что скорость распространения звука есть величина постоянная и равна 330 м/с. Однако, скорость распространения звуковых волн зависит от состояния атмосферы.
На рис. 3 и таблице 1 приведена зависимость скорости звука от температуры воздуха.
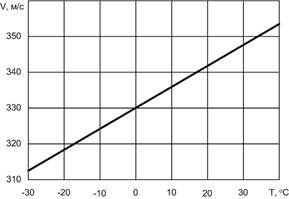
Рис. 3. Зависимость скорости звука от температуры воздуха
Таблица 1
Зависимость скорости звука при различной температуре
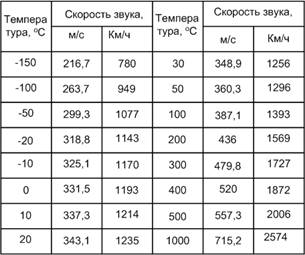
Учитывая, что в нашем регионе температура воздуха меняется в достаточно широком диапазоне; изменение скорости звука может привести к значительным ошибкам в определении расстояния до объекта и скорости сближения.
Это является существенным недостатком акустических локаторов. Следует отметить, что мощность пьезогенераторов, используемых как источник ультразвуковых сигналов, мала. Поэтому ультразвуковой локатор не может обеспечить необходимую дальность действия.
Диаграмма затухания электромагнитных волн оптического и инфракрасного диапазонов приведена на рис. 4.
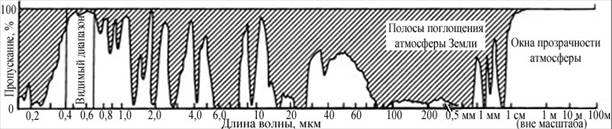
Рис. 4. Поглощение электромагнитного излучения атмосферой. Окна прозрачности атмосферы Земли: q «большое окно ": 0.3–1.3 мкм
Как видно из диаграммы в атмосфере имеются участки значительного поглощения и так называемые «окна прозрачности». В лазерных локаторах используются источники, генерирующие электромагнитные волны видимого или инфракрасного диапазонов.
Известно, что чем короче длина волны сложнее метеорологические условия, тем значительнее затухание. Поэтому в сложных метеорологических условиях лазерный локатор может оказаться неработоспособным.
Из вышеизложенного следует, что для реализации СПСА целесообразно использовать СВЧ локатор.
Таким образом, структурная схема СПСА принимает вид (рис.5)

Рис. 5 Структурная схема СПСА
В качестве измерителя расстояния до препятствия можно использовать устройство, принцип работы которого основан на излучении и приеме отраженного от объекта электромагнитного излучения. В этом случае дальность до объекта До может быть определена по времени задержки tз отраженного сигнала относительно излучаемого:
 (2)
(2)
где с — скорость распространения электромагнитных волн, м/с
tз — время задержки, с.
Процессор осуществляет математические и логические операции: производит расчет величины тормозного пути Sт, дальности до объекта До. Входными данными для процессора являются следующие величины:
Vн — начальная скорость движения автомобиля, м/с;
Vк — конечная скорость движения автомобиля, м/с;
j — коэффициент сцепления колес с дорогой;
g — ускорение силы тяжести, м/с2;
dвр — коэффициент учета вращающихся масс;
Кэ — коэффициент снижения эффективности торможения.
с — скорость распространения электромагнитных волн, м/с
Процессор является элементом системы обеспечения безопасности движения автомобиля. Он предназначен для выдачи водителю автомобиля предупредительных звукового и светового сигнала, если расстояние до впереди идущего автомобиля До становится £ 1,2 длины тормозного пути, т. е. если отношение До/ Sт.=1,2, то выдается водителю звуковой и световой предупредительный сигнал.
Если отношение До/ Sт.=1 и при этом  , т. е. расстояние до объекта уменьшается, то процессор выдает упреждающий сигнал на исполнительное устройство, которое воздействует на подачу топлива в двигатель и на тормозную систему с целью снижения скорости движения автомобиля вплоть до полной его остановки.
, т. е. расстояние до объекта уменьшается, то процессор выдает упреждающий сигнал на исполнительное устройство, которое воздействует на подачу топлива в двигатель и на тормозную систему с целью снижения скорости движения автомобиля вплоть до полной его остановки.
При снижении скорости движения автомобиля, когда , т. е. расстояние между автомобилями перестает сокращаться, управляющий сигнал становится нулевым.
, т. е. расстояние между автомобилями перестает сокращаться, управляющий сигнал становится нулевым.
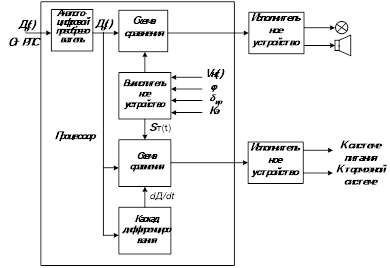
Рис. 6 Структурная схема процессора
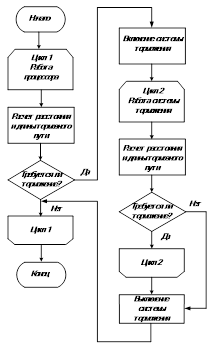
Рис. 7. Алгоритм работы процессора
Т.о. структурная схема процессора может быть представлена в следующем виде (рис. 6). Алгоритм работы процессора представлен на рис. 7.
Одним из направлений обеспечения безопасности движения на автомобильном транспорте является создание автоматических систем предотвращения столкновения автомобиля (СПСА), которые при помощи технического зрения анализируют пространственные координаты между транспортными средствами (ТС) в транспортном потоке. Информация от средств технического зрения о дистанции до препятствия (или преследуемого ТС) перерабатывается в бортовом компьютере и используется для управления исполнительными механизмами, которые замедляют автомобиль для восстановления безопасной дистанции или полностью затормаживают его в экстренных случаях.
Применение СПСА на автомобильном транспорте позволит существенно снизить число дорожно-транспортных происшествий (ДТП), увеличить пропускную способность автомобильных дорог и скорости движения ТС без опасности ДТП от наездов и столкновений, уменьшить динамические нагрузки в элементах тормозов ТС, т. е. повысить их надежность и долговечность, снизить износ шин в эксплуатации.
Литература:
1. Елистратов В. В., Безруков С. И., Стенин П. Г., Климаков В. С. Концепция развития систем предупреждения столкновений транспортных средств // Современные проблемы науки и образования. — 2014. — № 2.
2. Исследование изнашивания прецизионных деталей дизельной топливной аппаратуры / А. В. Новичков, Новиков Е. В., Рылякин Е. Г., Лахно А. В., Аношкин П. И. // Международный научный журнал. — 2014. — № 3. — С. 108–111.
3. А. М. Иванов, д.т.н., проф. А. Н. Солнцев, к.т.н., проф. МАДИ. Перспективы развития интеллектуальных бортовых систем автотранспортных средств в Российской Федерации. // Журнал автомобильных инженеров № 6 (65) 2010 г.
4. Аношкин, П. И. Некоторые проблемы технической эксплуатации автомобилей / П. И. Аношкин, Е. Г. Рылякин, А. А. Жидков// Транспорт. Экономика. Социальная сфера. (Актуальные проблемы и их решения): сборник статей Международной научно-практической конференции / МНИЦ ПГСХА. — Пенза: РИО ПГСХА, 2014. — 160 с.

