Организация обеспечения деятельности строительных предприятий, имеющих на своем балансе строительные и дорожные машины (СДМ), являются совокупностью методов, средств и технологий с целью установления, обеспечения, поддержания и совершенствования уровня качества технической эксплуатации техники [7].
Конкретные условия эксплуатации СДМ в современных рыночных условиях складываются на основе координации деятельности всех служб предприятия. Особенно важна роль качественного проведения технического обслуживания и ремонта (ТО и Р) машин на местах их фактического использования.
Такая практика находит место, в Германии. Компания Sortimo имеет логистический центр, специализированное мобильное оборудование, сервисные фургоны для выполнения монтажных и ремонтных работ с привлечением выездных бригад технического сервиса. Компания выполняет функции движения к объекту, к потребителю, заказчику для диагностики, ремонта, осмотра, обслуживания СДМ [3].
Мобильные мастерские представляют собой комплекс слесарного и диагностического оборудования, приспособлений, инструментов для выполнения работ технического обслуживания и ремонтов СДМ в условиях их использования при строительстве и организации полевых парков.
В связи с ростом объемов строительства новых и содержания существующей сети автомобильных дорог, строительства новых жилых массивов объемы применения СДМ требуют систематического оперативного обслуживания.
Применение СДМ в условиях временного пребывания на участках строительства или обслуживания монтажных работ на удаленных от постоянного пребывания на стационарной базе предприятия указывает на необходимость разработки оптимальных маршрутов мобильных средств ТО и Р.
Такие места сосредоточения СДМ в Пермском крае связаны с прокладкой и содержанием нефтегазопроводов, электросиловых высоковольтных линий и линий связи, строительством инженерных сооружений на автомобильных трассах и в зонах проживания населения. Для СДМ в этих случаях характерна большая подвижность и частое перемещение мобильных подразделений.
В период подготовки СДМ для диагностической работы в отрыве от постоянных баз создаются подвижные ремонтные ресурсы, предназначенные для реализации технической помощи подвижному составу машин на месте выполнения работ.
Среднегодовая потребность в передвижных средствах для парка СДМ представляет собой сложную задачу исследования операций и аппарата теории массового обслуживания. Однако, рассматривая отдельные подзадачи, авторы предлагают на первом этапе рассмотреть минимизацию потерь за счет оптимизации маршрутов передвижных ремонтных мобильных мастерских СДМ, если известны места дислокации техники и соответственно время получения заявок или задачи превентивного диагностирования и обслуживания машин. Расчет потребности в передвижных средствах ТО и Р определяется по зависимости [9]:
 ,
,
где Кпс — коэффициент, учитывающий объем работ, выполняемых в удаленных от основного предприятия зонах; Тг — суммарная годовая трудоемкость ТО и Р согласно состава СДМ; n — средний численный состав экипажней передвижных средств; Тсм — средняя продолжительность рабочей смены; Кпо — коэффициент использования мобильных средств по времени в течение смены для выполнения операций обслуживания; Дг — число рабочих дней в году; Ксм — число смен работы мобильных средств в сутки.
Поток заявок может быть применен в соответствии с законом Пуассона:
где t — расчетный промежуток времени; k — число требований на проведение технического обслуживания;  — математическое ожидание (среднее) числа заявок в единицу времени.
— математическое ожидание (среднее) числа заявок в единицу времени.
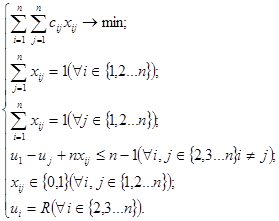
Особое место в организации графика движения занимает разработка оптимального маршрута. Проанализировав ситуацию по координатам пунктов назначения, скоростной режим и расход топлива разработчик предлагает вариант выгодного движения мобильных средств обеспечения ремонта и обслуживания СДМ. В основе решения этих рекомендаций находится задача коммивояжера — одна из самых известных задач комбинаторной оптимизации, заключающийся в поиске самого выгодного маршрута, проходящего через указанные пункты назначения хотя бы по одному разу с последующим возвратом в исходную точку. В условиях задачи указываются критерий выгодности маршрута и соответствующие матрицы расстояний, стоимости и т. п. Как правило, указывается, что маршрут должен проходить через каждый пункт только один раз. Существует несколько частных случаев общей постановки задачи, в частности геометрическая задача коммивояжера, треугольная задача коммивояжера, симметричная и ассиметричная задачи коммивояжера. Также существует обобщение задачи, так называемая обобщенная задача коммивояжера [1, 2].
В задаче коммивояжера заданы n пунктов и матрица С расстояний между ними, в общем случае нессиметричная. Размер этой матрицы n*n, ее элементы сij по смыслу задачи не отрицательные. Требуется построить такой маршрут обхода всех n пунктов, при котором общая длина пути будет минимальной. Сформулируем задачу коммивояжера как задачу на орграфе. Рассмотрим ориентированный граф  где
где  — конечное множество вершин;
— конечное множество вершин;  — конечное множество дуг; h — весовая функция дуг.
— конечное множество дуг; h — весовая функция дуг.
Задача коммивояжера в виде матрицы представлена в виде:

В качестве примера составлена задача коммивояжера передвижения мобильных мастерских внутри Перми и по городам Пермского края. Задан полный граф из 8 городов, который описывается квадратной матрицей (8*8) расстояний между каждой парой городов. Коммивояжер должен выехать с определенного начального города (Пермь), объехать все города, где дислоцируется техника, побывав в каждом городе по одному разу, и вернуться на базовое предприятие так, чтобы общая длина была минимальной (рис. 1). Коммивояжер должен выехать из Перми (1) и побывать: Нытва (2), Верещагино (3), Кудымкар (4), Соликамск (5), Березники (6), Чусовой (7), Кунгур (8).
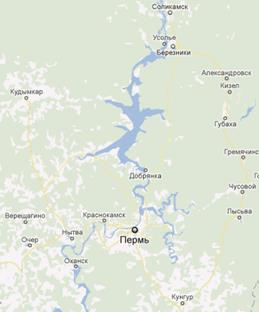
Рис. 1. Фрагмент карты местности с указанием пунктов назначения
В работе [5] указано на затратообразующие факторы предприятий, организующих эксплуатацию АТС, в число которых входят и затраты на горюче-смазочные материалы (ГСМ). Возможные решения по снижению включения затрат на ГСМ и тем самым обеспечение сокращения издержек, заключается в мониторинге расхода топлива. Наши исследования по указанной проблеме позволяют сделать заключение о том, что расход топлива целесообразно осуществлять путем установки в топливных баках АТС датчиков уровня жидкости, принцип действия которых основан на использовании акустических эффектов [6].
Принцип работы системы управления движением автотранспортного средства (АТС) заключается в отслеживании и анализе координат автомобиля во времени и пространстве. Реализация такой системы управления предполагает использование мощных комплексов, включающих спутниковые группировки космических аппаратов, наземных систем управления и развитую структуру систем передачи данных. Навигационный модуль может быть организован на основе приемников работающих в системе спутниковой радионавигации GPS/NAVSTAR или ГЛОНАСС [4, 8].
В качестве примера оборудования можно применить GPS/ГЛОНАСС приемник 9901/9902. Он обеспечивает определение координат двух антенн GPS+, закрепленных на корпусе транспортных средств. Приемник имеет защищенный от вибрации корпус с магнитными креплениями и встроенный радио модем для работы в режиме RTK.
Таким образом, оптимизированные маршруты приводят к уменьшению объема материальных и временных ресурсов базового предприятия, при выполнении инспекционных мероприятий по оценке технического состояния СДМ на отдаленных участках работ.
Литература:
1. Борознова А. Н., Кычкин А. В. Разработка системы контроля за перемещением объектов в режиме реального времени для повышения безопасности обращения с медицинскими отходами // Актуальные проблемы дорожно-транспортного комплекса. Охрана окружающей среды. Сборник научных трудов.- Пермь: Изд-во Перм. гос. техн. ун-ета, 2009. — С. 114–122.
2. Бочкарев А. А. Транспортная логистика. Решение транспортных задач в MICROSOFT EXCEL: Учеб. пособие. — СПб.: Изд-во Политехн. ун-та, 2006. — 62 с.
3. Кошер М. И. Sortimo: Продуманные решения для транспортирования и хранения рабочих инструментов и запасных частей // Строительные и дорожные машины. 2014. — № 11. — С. 58–59.
4. Кычкин В. И., Юшков В. С. Основы проектирования интеллектуальных платформ дорожных лабораторий // Монография; Перм. нац. исслед. политехн. ун-т — Пермь: Изд-во ОТ и ДО, 2014–148 с.
5. Лобов Н. В., Петухов М. Ю., Фомина Н. И., Сухореченко А. Н.. Coкращение издержек при вывозе твердых бытовых отходов путем оптимизации маршрутов движения мусоровозов и учета параметров загрузки//Охрана окружающей среды, транспорт, безопасность жизнедеятельности. Вестник ПГТУ. — Пермь: Изд-во Перм. гос. техн. ун-ета, № 2, 2010. — С. 12–16.
6. Мищенко С. В., Мордасов Д. М., Мордасов М. М. Струйно-акустический бесконтактный сигнализатор уровня // Датчики и системы. 2002. — С. 37–38.
7. Пугин К. Г., Юшков В. С., Бургонутдинов А. М. Развитие и современное состояние строительно-дорожной отрасли: Учебное пособие.- Пермь: Изд-во Перм. нац. исслед. политехн. ун-та, 2012. — 193 с.
8. Юшков В. С., Кычкин В. И., Бармин Н. Д. Информационные технологии в сервисе строительно-дорожных и коммунальных машин: Учебное пособие. Перм. нац. исслед. политехн. ун-т — Пермь: Изд-во ОТ и ДО, 2014–76 с.
9. Эксплуатация дорожных машин: Учебник для вузов // А. М. Шейнин, Б. И. Филиппов, В. А. Зорин и др.; Под ред. А. М. Шейнина. — М.: Транспорт, 1992. — 328 с.

