Введение
В последние годы наблюдается устойчивый рост интереса к беспилотным авиационным системам, способным выполнять широкий спектр задач в гражданской и военной сферах. Особое внимание исследователей привлекают роевые беспилотные летательные аппараты, представляющие собой распределенные мультиагентные системы, в которых достижение общей цели обеспечивается посредством координированного взаимодействия множества автономных агентов [1].
Использование роя БПЛА позволяет существенно повысить эффективность выполнения задач мониторинга территорий, поисково-спасательных операций, экологического контроля, сопровождения объектов и телекоммуникационного обеспечения. По сравнению с одиночными летательными аппаратами рой обладает большей отказоустойчивостью, гибкостью применения и возможностью распределения функциональной нагрузки между агентами [2].
Одновременно увеличение количества взаимодействующих БПЛА приводит к усложнению процессов управления. Возникает необходимость организации надежного обмена информацией между агентами, согласования коллективных действий, предотвращения столкновений и адаптации к изменяющимся условиям внешней среды. Решение указанных задач требует применения современных методов искусственного интеллекта, распределенного управления и самоорганизующихся сетевых технологий [3].
Целью исследования является анализ современных методов управления роем БПЛА, выявление ограничений существующих подходов и определение перспективных направлений развития интеллектуальных систем управления группами беспилотных летательных аппаратов.
Методы исследования основаны на анализе отечественных и зарубежных публикаций, посвященных управлению роем беспилотных летательных аппаратов. Для достижения поставленной цели использовались методы системного и сравнительного анализа научных работ в области мультиагентных систем, искусственного интеллекта и роевых технологий.
Особенности роевых систем БПЛА
Рой БПЛА представляет собой распределенную мультиагентную систему, в которой выполнение общей задачи обеспечивается за счет взаимодействия автономных агентов. В отличие от одиночных беспилотных аппаратов подобная организация позволяет повысить отказоустойчивость и расширить область наблюдения при выполнении миссии [6].
Важным условием функционирования роя является организация устойчивого обмена данными между агентами. Для решения данной задачи используются сети FANET, обеспечивающие самоорганизующееся взаимодействие беспилотных летательных аппаратов в условиях динамически изменяющейся топологии сети [5].
Эффективность роя определяется не только характеристиками отдельных БПЛА, но и качеством координации между участниками группы, механизмами распределения задач и поддержания сетевой связности [4].
Централизованные методы управления
Централизованные методы управления предполагают наличие единого управляющего узла, осуществляющего сбор информации от всех агентов роя и формирование управляющих воздействий. Подобный подход обеспечивает возможность построения глобального плана выполнения задачи и позволяет учитывать текущее состояние всей системы при принятии решений [7].
К преимуществам централизованной архитектуры относятся возможность глобальной оптимизации маршрутов движения, централизованное распределение задач между агентами и упрощенная реализация алгоритмов координации. Наличие единого центра управления позволяет эффективно контролировать выполнение общей миссии и обеспечивать согласованность действий группы.
Несмотря на указанные преимущества, централизованные системы обладают рядом существенных недостатков. Основным ограничением является наличие единой точки отказа. Выход из строя центрального управляющего узла способен привести к полной потере управления роем и прекращению выполнения поставленной задачи. Кроме того, при увеличении количества агентов существенно возрастает объем передаваемых данных и вычислительная нагрузка на управляющий центр, что негативно влияет на масштабируемость подобных решений [15].
Дополнительной проблемой является высокая чувствительность к нарушениям каналов связи. Потеря связи между агентами и центром управления способна привести к снижению эффективности функционирования роя и возникновению ошибок координации. По этой причине централизованные методы чаще используются в системах с ограниченным числом агентов либо в задачах, не предъявляющих высоких требований к отказоустойчивости [11].
Децентрализованные методы управления
Альтернативой централизованным архитектурам являются децентрализованные методы управления, основанные на локальном взаимодействии агентов. В подобных системах каждый БПЛА самостоятельно принимает решения на основе информации о состоянии окружающей среды и данных, получаемых от соседних элементов роя [15].
Отсутствие центрального управляющего узла позволяет существенно повысить отказоустойчивость системы. Даже при потере отдельных агентов рой сохраняет способность к выполнению поставленной задачи за счет перераспределения функций между оставшимися участниками группы. Данное свойство является одним из ключевых преимуществ децентрализованных систем управления [5].
Еще одним достоинством является высокая масштабируемость. Увеличение количества агентов не приводит к пропорциональному росту нагрузки на отдельный элемент системы, поскольку вычисления распределяются между всеми участниками роя. Благодаря этому децентрализованные методы рассматриваются как перспективное направление развития крупномасштабных роевых систем [14].
Однако реализация подобных подходов связана с рядом сложностей. Основными проблемами являются обеспечение согласованности действий агентов, предотвращение конфликтов управления и поддержание устойчивого информационного обмена между элементами сети. Кроме того, эффективность работы роя существенно зависит от качества используемых протоколов взаимодействия и алгоритмов коллективного принятия решений [7].
Методы обучения с подкреплением
Одним из наиболее активно развивающихся направлений в области интеллектуального управления БПЛА являются методы обучения с подкреплением (Reinforcement Learning). В отличие от традиционных алгоритмов управления, RL позволяет агенту самостоятельно формировать стратегию поведения на основе опыта взаимодействия со средой [12].
В процессе обучения агент получает информацию о состоянии среды, выполняет определенные действия и получает числовую оценку результата в виде функции вознаграждения. На основе накопленного опыта происходит корректировка стратегии поведения, направленная на максимизацию суммарного вознаграждения. Благодаря этому агент способен адаптироваться к изменяющимся условиям окружающей среды и принимать решения в условиях неопределенности [13].
В системах управления роем БПЛА методы обучения с подкреплением используются для решения задач планирования маршрутов, распределения ресурсов, предотвращения столкновений и адаптации к динамически изменяющимся условиям выполнения миссии. Современные исследования демонстрируют высокую эффективность подобных алгоритмов при решении сложных задач автономного управления [12].
Вместе с тем применение RL связано с рядом ограничений. Для обучения агентов требуются значительные вычислительные ресурсы и большое количество обучающих эпизодов. Кроме того, эффективность алгоритма во многом определяется корректностью выбора функции вознаграждения и параметров обучения. Указанные особенности ограничивают возможности практического применения методов обучения с подкреплением в системах с ограниченными вычислительными ресурсами [13].
Multi-Agent Reinforcement Learning
В отличие от классического обучения с подкреплением, методы Multi-Agent Reinforcement Learning (MARL) ориентированы на совместное обучение нескольких взаимодействующих агентов. Такой подход позволяет учитывать влияние действий каждого БПЛА на поведение всей группы и использовать коллективные стратегии при решении задач координации, распределения целей и планирования маршрутов [14].
Преимуществом MARL является возможность организации распределенного принятия решений без постоянного централизованного управления. Вместе с тем увеличение числа агентов приводит к росту вычислительных затрат и усложняет процесс обучения, что остается одной из основных проблем практического применения данного подхода [12, 14].
Роевой интеллект и методы Particle Swarm Optimization
Методы роевого интеллекта основаны на моделировании коллективного поведения природных систем. Одним из наиболее распространенных алгоритмов данной группы является Particle Swarm Optimization (PSO), используемый для решения задач планирования маршрутов, распределения задач и согласования действий агентов [9].
Алгоритм PSO обеспечивает коллективный поиск решений на основе обмена информацией между участниками роя и отличается сравнительной простотой реализации. Однако его эффективность может снижаться вследствие преждевременной сходимости к локальному оптимуму, особенно в сложных динамических средах [10].
Нейросетевые методы управления роем БПЛА
Нейронные сети применяются в системах управления роем БПЛА для обработки данных сенсоров, распознавания объектов, прогнозирования изменений среды и поддержки принятия решений [13].
В современных исследованиях особое внимание уделяется совместному использованию нейронных сетей и методов обучения с подкреплением, а также графовым нейронным сетям, позволяющим учитывать структуру взаимодействия агентов внутри роя [12, 15]. Подобные решения рассматриваются как перспективное направление повышения автономности и адаптивности роевых систем.
Выявленные ограничения существующих решений
Проведенный анализ современных исследований показывает, что ни один из существующих подходов не обеспечивает полного решения задачи устойчивого управления роем БПЛА.
Во-первых, централизованные методы обладают единой точкой отказа. Нарушение функционирования управляющего узла способно привести к потере координации действий всей группы и существенному снижению эффективности выполнения миссии [15].
Во-вторых, методы обучения с подкреплением требуют значительных вычислительных ресурсов и больших объемов обучающих данных. Для многих практических задач использование подобных алгоритмов на борту малогабаритных БПЛА остается затруднительным [12].
В-третьих, алгоритмы роевого интеллекта могут сталкиваться с проблемой локальных оптимумов, что ограничивает качество получаемых решений в сложных динамических средах [9].
В-четвертых, многие современные методы демонстрируют недостаточную масштабируемость при увеличении количества агентов. Рост размера роя приводит к увеличению объемов передаваемой информации и усложнению процессов координации [14].
Следует отметить, что большинство исследований сосредоточено на решении отдельных задач управления. В научной литературе сравнительно редко рассматриваются подходы, объединяющие одновременно методы обучения с подкреплением, роевой интеллект, нейросетевые технологии и распределенное управление. Анализ публикаций показывает, что вопросы комплексного обеспечения устойчивости, адаптивности и масштабируемости остаются недостаточно проработанными [2, 11, 14].
Таким образом, можно сформулировать следующий научный пробел: в настоящее время отсутствует универсальный подход, обеспечивающий одновременно высокий уровень адаптивности, устойчивости и масштабируемости управления роем БПЛА.
Перспективные направления развития систем управления роем БПЛА
Современные тенденции развития беспилотных систем свидетельствуют о постепенном переходе от использования отдельных алгоритмов управления к построению комплексных интеллектуальных архитектур. Перспективным направлением является интеграция методов искусственного интеллекта, распределенного управления и сетевых технологий в рамках единой системы принятия решений.
Особый интерес представляет развитие гибридных подходов, объединяющих преимущества Reinforcement Learning, Multi-Agent Reinforcement Learning, методов роевого интеллекта и нейросетевых технологий. Подобные решения способны обеспечить более высокий уровень адаптивности системы к изменяющимся условиям среды и повысить устойчивость роя к отказам отдельных агентов [12].
Среди перспективных направлений развития роевых систем выделяются технологии цифровых двойников, используемые для моделирования поведения БПЛА в различных сценариях функционирования [4]. Одновременно возрастает актуальность обеспечения безопасности FANET-сетей и защиты системы управления от внешних воздействий [2].
Классификация современных методов управления роем БПЛА представлена на рисунке 1.
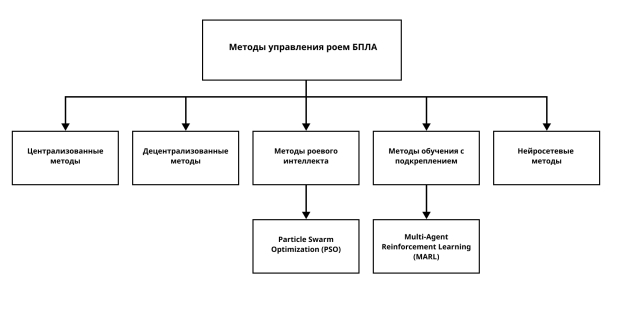
Рис. 1. Классификация современных методов управления роем БПЛА
Заключение
Проведенный обзор показал, что существующие подходы к управлению роем БПЛА решают различные аспекты коллективного взаимодействия агентов, однако не обеспечивают одновременного достижения адаптивности, отказоустойчивости и масштабируемости системы. Анализ литературы свидетельствует о том, что большинство исследований сосредоточено на развитии отдельных методов управления, тогда как вопросы их комплексной интеграции остаются недостаточно изученными.
Централизованные архитектуры обеспечивают высокий уровень координации, но чувствительны к отказу управляющего узла. Децентрализованные методы обладают большей устойчивостью, однако требуют эффективных механизмов согласования действий агентов. Методы обучения с подкреплением и MARL расширяют возможности адаптации системы к изменяющимся условиям среды, тогда как алгоритмы роевого интеллекта позволяют решать задачи коллективной оптимизации.
На основании проведенного анализа можно сделать вывод о перспективности гибридных подходов, объединяющих преимущества различных методов управления. Разработка подобных решений представляет интерес для дальнейших исследований в области интеллектуальных мультиагентных систем и роевых технологий БПЛА.
Сравнительная характеристика современных методов управления роем БПЛА представлена в таблице 1.
Таблица 1
Сравнительная характеристика современных методов управления роем БПЛА
|
Метод управления |
Преимущества |
Недостатки |
Устойчивость |
|
Централизованное управление |
Глобальная оптимизация, централизованное распределение задач, единый контроль |
Единая точка отказа, ограниченная масштабируемость, высокая нагрузка на центр управления |
Низкая |
|
Децентрализованное управление |
Отсутствие единой точки отказа, высокая отказоустойчивость, масштабируемость |
Сложность координации агентов, зависимость от качества обмена данными |
Высокая |
|
Reinforcement Learning |
Адаптация к изменяющейся среде, автономность принятия решений |
Высокие вычислительные затраты, длительное обучение |
Средняя |
|
Multi-Agent Reinforcement Learning |
Коллективное обучение, учет взаимодействия агентов, адаптивность |
Сложность обучения, проблемы масштабирования |
Средняя–высокая |
|
Particle Swarm Optimization |
Эффективное распределение задач, коллективный поиск решений, простота реализации |
Возможность попадания в локальный оптимум |
Средняя |
|
Нейронные сети |
Анализ данных, прогнозирование среды, распознавание объектов |
Требовательность к вычислительным ресурсам и обучающим данным |
Средняя |
|
FANET |
Самоорганизация сети, гибкость взаимодействия агентов |
Уязвимость к сетевым атакам и нарушениям связи |
Средняя |
|
Гибридные методы |
Совмещение преимуществ различных подходов |
Сложность реализации и интеграции компонентов |
Потенциально высокая |
Литература:
- Довгаль В. А. Использование оперативного метода планирования задач для роя дронов при поддержке языковой модели // Вестник Адыгейского государственного университета. Серия: Естественно-математические и технические науки. 2024. Вып. 2 (341). С. 78–85.
- Довгаль В. А., Довгаль Д. В. Анализ уязвимостей и угроз безопасности роя дронов с поддержкой Wi-Fi, противостоящего атакам злоумышленников // Вестник Адыгейского государственного университета. Серия: Естественно-математические и технические науки. 2020. Вып. 3 (266). С. 67–73.
- Уланов С. И., Криводубский О. А., Никитина А. А. Методы использования беспилотных летательных аппаратов в полете // Проблемы искусственного интеллекта. 2024. № 2 (33). С. 29–35.
- Быков Н. В., Товарнов М. С., Федулов В. А. Имитационное моделирование и оценка эффективности систем обнаружения и противодействия беспилотным транспортным средствам, несущим угрозу нормальному функционированию «умного города» // Вестник РФФИ. 2024. № 1 (121). С. 54–65.
- Погодин Р. А., Широков И. Б. Система управления роя БПЛА // Современные проблемы радиоэлектроники и телекоммуникаций: материалы международной научно-технической конференции. Севастополь, 2022. С. 285–287.
- Костоглотов А. А., Михайлов Г. Г. Перспективы применения роевых технологий в сфере беспилотной авиации // Информатизация образования — 2024: материалы Международной научно-практической конференции. Липецк: ЛГТУ, 2024. С. 197–204.
- Лосев В. В., Ковалев Д. И., Ворошилова А. А., Туева Е. В. Обзор перспективных проектов в области устойчивого территориального развития и глобальных киберфизических систем // Информатика. Экономика. Управление. 2023. Т. 2. № 2. С. 401–413.
- Rahman M., Islam M., Uddin J. A Survey on Multi-UAV Path Planning // Drones. 2025. Vol. 9. No. 4. Article 263.
- Cheng Q., Zhang Z., Du Y., Li Y. Research on Particle Swarm Optimization-Based UAV Path Planning Technology in Urban Airspace // Drones. 2024. Vol. 8. No. 12. Article 701. DOI: 10.3390/drones8120701.
- Aljalaud F., Kurdi H., Youcef-Toumi K. Bio-inspired Multi-UAV Path Planning Heuristics: A Review // Mathematics. 2023. Vol. 11. No. 10. Article 2356.
- Wang X., Zhao Z., Yi L., Ning Z., Guo L., Yu F. R., Guo S. A Survey on Security of UAV Swarm Networks: Attacks and Countermeasures // ACM Computing Surveys. 2024. Vol. 57. No. 3. Article 74. DOI: 10.1145/3703625.
- Frattolillo F., Brunori D., Iocchi L. Scalable and Cooperative Deep Reinforcement Learning Approaches for Multi-UAV Systems: A Systematic Review // Drones. 2023. Vol. 7. No. 4. Article 236.
- Bayerlein H., Theile M., Caccamo M., Gesbert D. Multi-UAV Path Planning for Wireless Data Harvesting with Deep Reinforcement Learning // IEEE Open Journal of the Communications Society. 2021. Vol. 2. P. 1171–1187.
- Zhao X., Yang R., Zhong L. Multi-UAV Path Planning and Following Based on Multi-Agent Reinforcement Learning // Drones. 2024. Vol. 8. No. 1. Article 18.
- Zhao J., Sun J., Cai Z., Wang Y., Wu K. Distributed Coordinated Control Scheme of UAV Swarm Based on Heterogeneous Roles // Chinese Journal of Aeronautics. 2022. Vol. 35. No. 1. P. 81–97.

