Введение
В современном мире при анализе числовых данных, как правило, используются вычислительные машины с различными архитектурами ядра процессора и различное программное обеспечение. Ввиду особенностей представления вещественных чисел (с плавающей точкой) в процессорах вычислительных машин, различного представления типов данных в коде программного обеспечения, а также особенностей работы компиляторов (интерпретаторов) языков программирования и операционных систем, возникает вопрос о достоверности полученных вычислений.
Так, например, процессоры с различными архитектурами ядра имеют различную длину битов для хранения чисел. Компиляторы и интерпретаторы языков программирования могут использовать оптимизацию программного кода, в ходе которой происходит отбрасывание дробной части числа как с округлением, так и без округления.
Совокупность вышеизложенных особенностей говорит о том, что данные факторы однозначно влияют на результаты вычислений. Вопрос критичности и оценки влияния данных факторов носит индивидуальный характер.
В данной статье приведена оценка влияния использования приближенных чисел на результаты вычислений математического ожидания и стандартного отклонения по выборке (СКО) измеренных координат спутникового навигационного оборудования.
Анализ влияния приближенных чисел
Для оценки влияния чисел с плавающей точкой на результаты измерений напишем программный код следующего вида:
Программа состоит из основного цикла в теле которого происходит суммирование двух переменных n-е количество итераций, с последующим n-м количеством вычитаний. В результате данного алгоритма предполагается получить результат близкий к нулю. Далее, подбирая порядок округления чисел и количество итераций циклов, провести анализ полученных результатов.
Алгоритм программы:
— создать две переменные вещественного типа;
— создать основной цикл, в котором будут происходить итерации вычислений;
— в основном цикле создать циклы промежуточных вычислений;
— создать одну переменную вещественного типа для сохранения результатов вычислений;
— создать массив для сохранения промежуточных вычислений;
— отобразить значения массива в виде графика.
На начальном этапе анализа зададим 100 итераций основного цикла и 10 итераций вспомогательных циклов. На рис. 2 представлен график результата вычислений. Тело программы представлено на рис. 1
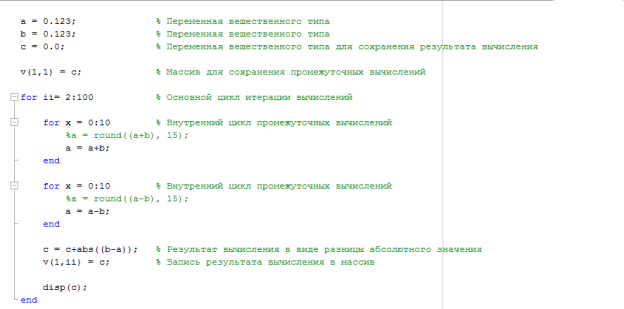
Рис. 1. Основное тело тестовой программы
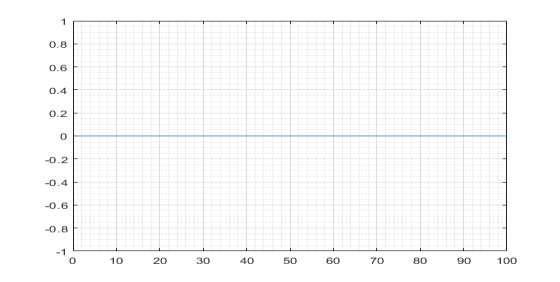
Рис. 2. Результаты вычислений с параметрами: Основной цикл-100, вспомогательные циклы-10
Видим, что при заданных параметрах результат вычислений нулевой. Увеличим количество итераций внутренних циклов до 100. Результат вычислений представлен на рис. 3.
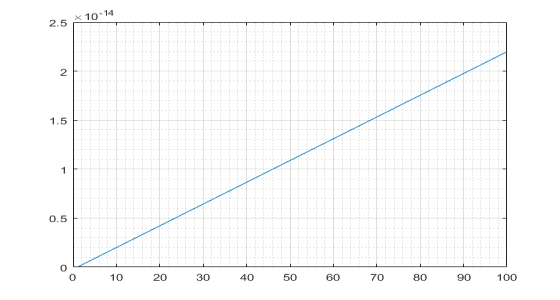
Рис. 3. Результаты вычислений с параметрами: Основной цикл-100, вспомогательные циклы-100
При увеличении количества итераций вычислений до ста на графике рис. 3 видим линейно возрастающую ошибку.
Для более глубокого анализа, проведем итерации вычислений пошагово, контролируя при этом значение переменной ‘a’. Результат итерации вычислений десятого шага представлен на рис. 4.
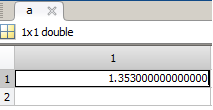
Рис. 4. Результат вычислений в переменной ‘a’ на десятом шаге вычислений
Увеличим количество итераций до двадцати. Результат итерации вычислений двадцатого шага представлен на рис. 5.
Рис. 5. Результат вычислений в переменной ‘a’ на двадцатом шаге вычислений
На двадцатом шаге итерации цикла вычислений обнаруживается ошибка в пятнадцатом разряде дробной части числа в виде единицы. Увеличим количество итераций до тридцати. Результат итерации вычислений тридцатого шага представлен на рис. 6.
Рис. 6. Результат вычислений в переменной ‘a’ на тридцатом шаге вычислений
Очевидно, что при увеличении итераций ошибка носит возрастающий характер.
Увеличим основной цикл программы до тысячи итераций и воспользуемся встроенной в язык программирования функцией округления числа до пятнадцати разрядов в дробной части числа. На рис. 7 представлен результат вычислений при использовании функции округления до пятнадцатого разряда дробной части числа.
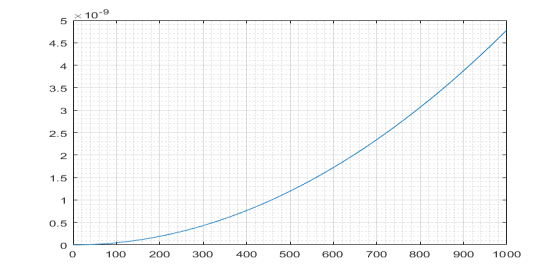
Рис. 7. Результат вычислений с использованием функции округления до 15 разряда дробной части
Применим функцию округления, при этом изменив округление до тринадцатого разряда дробной части. На рис. 8 представлен результат вычислений при использовании функции округления до тринадцатого разряда дробной части числа.
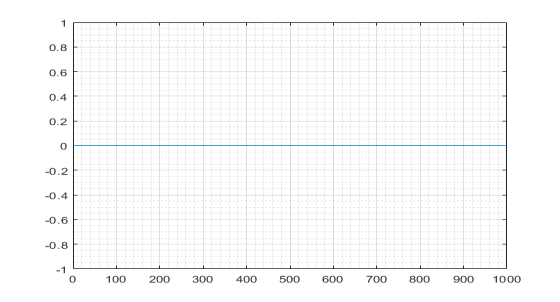
Рис. 8. Результат вычислений с использованием функции округления до 13 разряда дробной части
При округлении числа до тринадцатого разряда в дробной части ошибки не возникает. Итак, можно сделать вывод, что величина ошибки будет зависеть от количества итераций и от точности числовых значений.
Методика проведения оценки
В исходных данных от спутникового навигационного приемника принимается решение. При определении погрешности координат навигационной аппаратуры потребителей производим запись измеренных данных для последующего определения стандартного отклонения по выборке (СКО) [1, с. 5] случайной составляющей погрешности (1),
определяем разницу истинного и измеренного значения (2) с последующим переводом широты (3) и долготы (4) из угловых секунд в метры.



Замечание. Вкачестве истинного значения принимаются координаты, выдаваемые имитатором сигналов ГНСС.
Далее определяется погрешность по уровню вероятности 99,7 % (6).

Коэффициент для формул (3) и (4) находим по формуле (7).
Для понимания влияния точности вычислений на результат, вычисление математического ожидания и стандартного отклонения по выборке (СКО) производим по двум коэффициентам повышенной и пониженной точности с последующим взятием для последующего анализа модуля разности полученных вычислений (8).
Набор данных, используемых для вычислений, представляет собой непрерывный ряд из 100, 1000 и 10000 измерений соответственно.
где







В соответствии с формулой (7) вычислим коэффициент повышенной точности:
K = 30.92778716; (9)
На основе вычисленного коэффициента (9), возьмем коэффициент приближенного числа с точностью 0,01сизбытком (10),
при абсолютной погрешности приближения (11):


где s-абсолютная погрешность приближения,

Для определения влияния на результаты вычислений при различных коэффициентах, из комплексного решения, полученного от спутникового навигационного приемника (BLH), возьмем одну составляющую по широте (B).
Исходя из анализа, проведенного ранее, определим влияющий на результаты разряд дробной части коэффициента (9), как разность итоговых вычислений (8). На рис. 9 представлен результат определения влияющего разряда с округлением до восьмого разряда.
Замечание. Вцелях улучшения обзора динамики на графиках рис. 10–14 построен полином второй степени
Рис. 9. Определение влияющего разряда с округлением 8
При уменьшении разрядов округления в дробной части до семи разрядов, наблюдаем на графике рис.10 появление шумов. Данные шумы говорят о том, что наблюдается расхождение результатов вычислений. Причем, при дальнейшем уменьшении разрядов в дробной части числа, амплитуда разницы результирующих значений значительно возрастает. На рис.11 представлен график с округлением до двух разрядов в дробной части числа
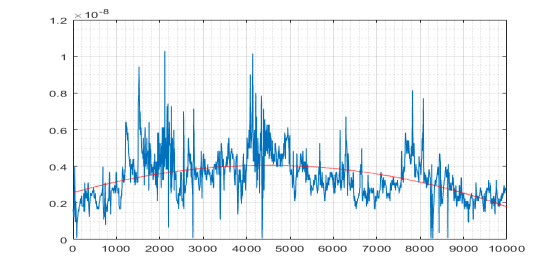
Рис. 10. Определение влияющего разряда с округлением 7
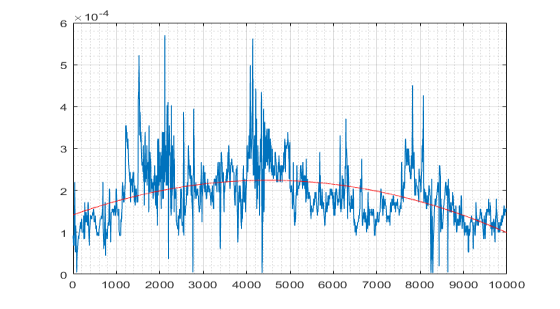
Рис. 11. Определение влияющего разряда с округлением 2
Подставим коэффициенты из формул (9) и (10) в уравнение (3) для получения координаты широты в метрах. Полученные результаты вычислений сведем в таблицу:
Таблица 1
Результаты измерений с различным коэффициентом
|
Изм. |
Матожидание (K повыш. ) |
Матожидание (K пониж. ) |
СКО (K повыш. ) |
СКО (K пониж. ) |
3s (K повыш. ) |
3s (K пониж. ) |
|
100 |
1,2559 |
1,2560 |
0,6058 |
0,6059 |
3,0734 |
3,0736 |
|
1000 |
1,6715 |
1,6717 |
0,4448 |
0,4448 |
3,0059 |
3,0062 |
|
10000 |
2,6236 |
2,6238 |
0,9926 |
0,9926 |
5,6013 |
5,6017 |
Результат уравнения (8) при 100 точках измерений представлен в виде графика на рис. 12.
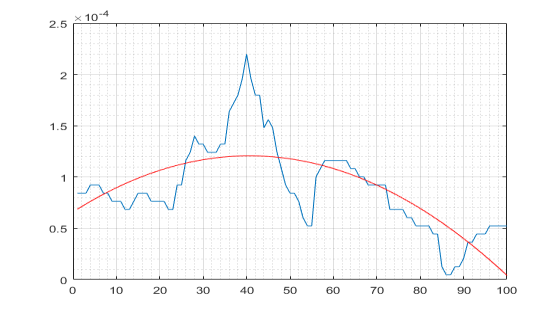
Рис. 12. Результат уравнения (8). 100 точек измерения
На рис. 12 на аппроксимированном тренде можем наблюдать, что на начальном этапе вычислений происходит небольшой рост до середины интервала с последующем снижением.
Результат уравнения (8) при 1000 точек измерения представлен в виде графика на рис.13.
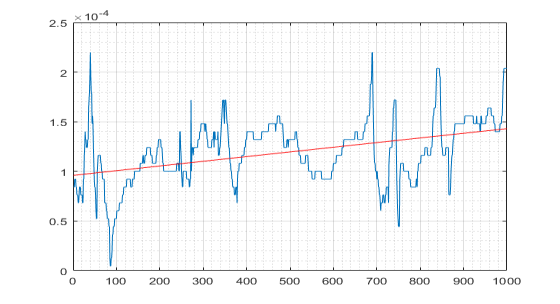
Рис. 13. Результат уравнения (8). 1000 точек измерения
На рис. 13 аппроксимированный тренд носит линейный характер на всём диапазоне.
Результат уравнения (8) при 10000 точек измерения представлен в виде графика на рис.14.
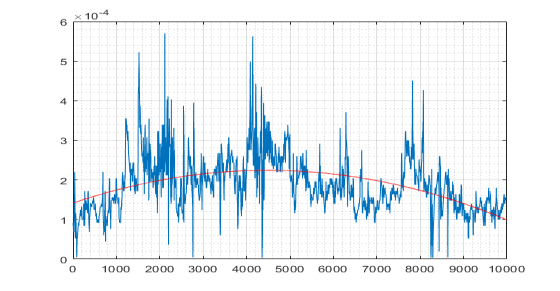
Рис. 14. Результат уравнения (8). 10000 точек измерения
На рис.14 видим, что из всей выборки (10000), аппроксимированный тренд незначительно возрастает до середины интервала. Далее наблюдаем откат к исходным значениям.
Как видно из таблицы 1, при использовании пониженного коэффициента (10), математическое ожидание незначительно смещается вправо вдоль оси абсцисс. Стандартное отклонение по выборке (СКО) остается неизменным, при этом, в следствии увеличения математического ожидания, значение 3s возрастает с увеличением количества измерений.
Выводы
В данной статье продемонстрированы особенности работы вычислительной машины с вещественными числами. Наглядно продемонстрировано влияние данных особенностей на результаты вычислений.
Показана работа по анализу измеренных данных с учетом влияния использования приближенных чисел на результат измерений.
По результатам проведенной работы можно сделать вывод, что для обеспечения единства измерений при обработке данных с использованием вычислительных машин необходимо обращать внимание на используемые типы данных и формат числовых значений. Учитывать то обстоятельство, что такие факторы, как количество измерений и объем вычислений могут повлиять на конечный результат.
Литература:
- Пустовалов Г. Е. Погрешности измерений. — Методическая разработка по общему физическому практикуму — МГУ имени М. В. Ломоносова, 2012.
- ФГУП «ВНИИФТРИ» п. Менделеево — Методика поверки 651–13–58МП, 2013.
- МАИ каф. 604. — Спутниковые навигационные системы, 2004.
- ГОСТ Р 52928–2010 Система спутниковая навигационная глобальная. –Термины и определения, 2010.

