- Анализ предметной области
Современная микроэлектронная промышленность характеризуется ростом объемов производства и повышением требований к качеству продукции. Миниатюризация технологических процессов требует высокой точности и повторяемости операций, что обуславливает широкое применение робототехнических систем. Особое значение имеет обработка и транспортировка кремниевых пластин, при которой необходимо обеспечивать прямолинейность и равномерность траектории перемещения рабочего органа.
Для решения задач точного позиционирования в плоскости широко применяются роботы типа SCARA, обладающие высокой жесткостью, точностью и компактностью. Эти особенности делают их эффективными в условиях ограниченного рабочего пространства, характерного для микроэлектронного производства. Типовой SCARA-робот относится к классу шарнирных манипуляторов и, как правило, имеет две вращательные степени свободы в горизонтальной плоскости.
Эффективная эксплуатация таких систем требует предварительной подготовки, включающей расчет кинематических параметров и планирование траектории. Ключевую роль играют задачи прямой и обратной кинематики, обеспечивающие определение координат рабочего органа и соответствующих углов поворота звеньев. Также необходимо учитывать ограничения рабочей области, представляющей собой кольцевую зону, определяемую длинами звеньев манипулятора.
Анализ существующих программных решений показал, что они, как правило, ориентированы либо на моделирование, либо на управление, что ограничивает возможности комплексной отладки. Недостаточная интеграция функций визуализации, контроля рабочей зоны и расчета параметров движения усложняет настройку и увеличивает риск ошибок.
- Концептуальная модель
В процессе разработки программного модуля управления шарнирным роботом (ПМ УШР) важным этапом является построение концептуальной модели системы. Концептуальная модель позволяет формализовать структуру программного обеспечения, определить основные компоненты программного ПМ УШР, их функции и взаимосвязи, а также задать принципы обработки и передачи данных между ними. Это обеспечивает целостное представление о работе программного модуля и служит основой для последующей реализации.
Для обеспечения безопасности и возможности отладки траектории движения ПМ УШР делится на 2 режима работы:
— Режим управления — обеспечивает взаимодействие с реальным роботом: передача команд перемещения, задание координат и параметров движения, а также контроль текущего состояния (углы, скорости, готовность к работе).
— Режим моделирования — предназначен для предварительной отладки без подключения к оборудованию: расчет кинематики, построение и визуализация траекторий, проверка рабочей области и выявление ошибок.
Выбор режима осуществляется оператором через графический интерфейс перед началом работы
Диаграмма последовательности (Рис. 1) отражает временной порядок взаимодействия между пользователем, графическим интерфейсом, модулем кинематики и модулем визуализации при планировании и отображении траектории в режиме моделирования.
Процесс начинается с ввода начального положения робота в виде углов звеньев, после чего выполняется проверка и отрисовка исходного положения. Далее задаются параметры движения: целевая точка в декартовой системе координат, время движения и количество точек разбиения траектории.
Модуль кинематики на основе обратной кинематики рассчитывает траекторию и формирует массив кадров, каждый из которых содержит время, углы, угловые скорости и координаты рабочего органа. После завершения расчёта интерфейс инициирует анимацию: в цикле по элементам массива модуль визуализации последовательно обновляет положение звеньев робота.
Таким образом, диаграмма наглядно показывает, как вводные данные преобразуются в расчётные параметры, а затем — в покадровую анимацию, обеспечивая наглядную проверку траектории до её передачи на реальный контроллер.
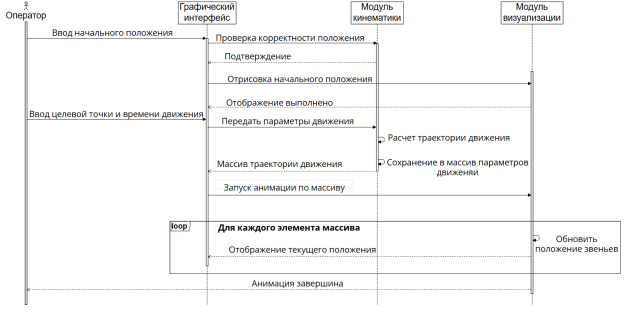
Рис. 1. Диаграмма последовательности в режиме моделирования
В режиме управления, в отличие от моделирования, реализуется непрерывный обмен данными между программным обеспечением и контроллером (Рис. 2). Процесс начинается с подключения оператора к контроллеру. После установления соединения система периодически запрашивает состояние осей, получая данные об углах и скоростях.
Далее система переходит к основному циклу перемещения: отправляется запрос текущего положения робота, в ответ поступают фактические углы поворота звеньев. Модуль кинематики переводит полученные углы в декартовы координаты рабочего органа, после чего выполняется расчёт следующей точки движения на основе заданной траектории. Затем модуль вычисляет целевые углы для следующего положения и рассчитывает необходимые угловые скорости для каждой оси.
Полученные значения передаются контроллеру в составе команды на перемещение, после чего контроллер подтверждает выполнение. По завершении всего перемещения контроллер направляет уведомление о завершении.
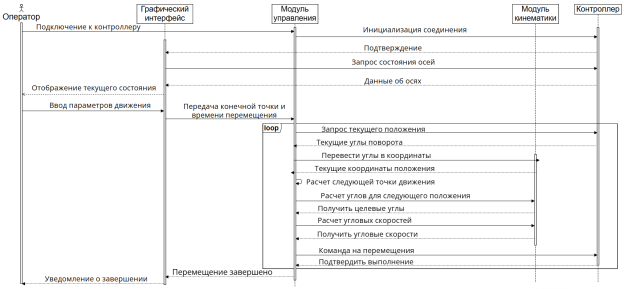
Рис. 2. Диаграмма последовательности в режиме моделирования
- Выбор технологий и среды разработки
Программный модуль разработан на языке программирования C# с использованием технологии WPF (Windows Presentation Foundation) в среде разработки Microsoft Visual Studio. Выбор данного стека обусловлен его широкими возможностями для создания современных настольных приложений с развитым графическим интерфейсом и высокой производительностью.
Язык C# обеспечивает строгую типизацию, развитую объектно-ориентированную модель и удобные средства работы с асинхронными операциями, что особенно важно при реализации взаимодействия с оборудованием и выполнении вычислительно задач, таких как расчет кинематики и планирование траекторий [1].
Технология WPF позволяет создавать гибкий и масштабируемый пользовательский интерфейс с использованием декларативного языка разметки XAML. К преимуществам WPF относятся поддержка привязки данных (Data Binding), шаблонов и стилей, а также возможность реализации архитектурного паттерна MVVM, что обеспечивает разделение логики и интерфейса, упрощает сопровождение и расширение программного модуля [2].
Среда разработки Microsoft Visual Studio предоставляет мощные инструменты для написания, отладки и тестирования кода, включая встроенный отладчик, систему управления проектами и интеграцию с системами контроля версий. Это значительно ускоряет процесс разработки и повышает качество программного продукта [3].
- Техническая реализация
Для организации взаимодействия между пользовательским интерфейсом и логикой приложения используется архитектурный шаблон MVVM (Model–View–ViewModel). В рамках данного подхода происходит разделение данных, логики обработки и визуального представления, что позволяет упростить разработку и повысить читаемость кода. Модель (Model) содержит описание данных и алгоритмов, ViewModel реализует логику обработки и связывает данные с интерфейсом, а представление (View) отвечает за отображение информации пользователю.

Рис. 3. Паттерн MVVM
В рамках выбранного архитектурного подхода ключевая роль отводится слою представления логики — ViewModel, который обеспечивает взаимодействие между пользовательским интерфейсом и вычислительными модулями системы. Для каждого из двух функциональных режимов программного модуля реализован отдельный класс ViewModel, что позволяет разделить ответственность и повысить читаемость и сопровождаемость кода.
В рамках архитектурного шаблона MVVM ключевую роль играет механизм привязки данных, обеспечивающий взаимодействие между представлением и моделью представления. Привязка данных позволяет автоматически синхронизировать значения элементов пользовательского интерфейса с соответствующими свойствами ViewModel без необходимости прямого обращения к элементам управления из программного кода.
- Пользовательский интерфейс
Пользовательский интерфейс является важнейшей частью программного средства анализа и визуализации параметров технологического процесса, поскольку именно через него осуществляется взаимодействие пользователя с системой. Качество его реализации напрямую определяет эффективность работы технолога, скорость выполнения аналитических операций и удобство восприятия результатов обработки данных.
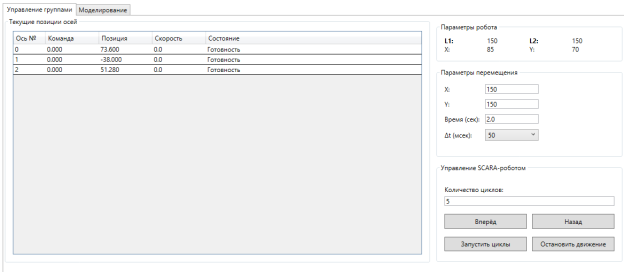
Рис. 4. Экранная форма управления роботом
На рисунке 4 представлена экранная форма режима управления робота. В левой части экрана в таблице отображаются текущие углы поворота осей робота, команда, представляющее целевую позицию движения, скорость движения и состояние оси. Ось может находиться в состоянии готовности к движению, в движении или в ошибке.
Вводятся параметры перемещения такие как, шаг на который нужно переместиться вдоль прямой, время перемещения, частота дискретизации Δt, и количество циклов повторения. Ниже находятся команды управления.
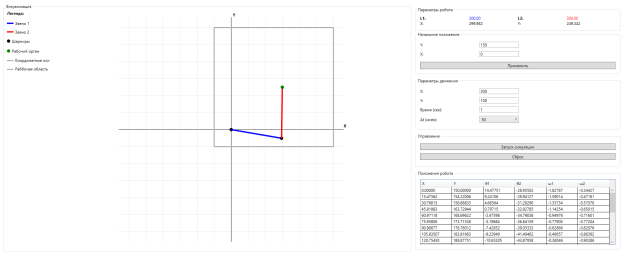
Рис. 5. Экранная форма моделирования движения
На рисунке 5 представлена экранная форма режима симуляции движения. Центральное место занимает график, который визуализирует движение звеньев робота, траекторию движения, положения рабочего органа и ограничения рабочей зоны. Правее расположены поля для ввода параметров движения, аналогичные режиму управления. Ниже расположена таблица, в которую записываются расчетные параметры движения на каждом этапе выполнения алгоритма расчета каждой следующей точки движения.
- Заключение
Разработанный программный модуль представляет собой эффективный инструмент, позволяющий повысить точность планирования движений, сократить время пусконаладочных работ и упростить процесс взаимодействия с роботизированным оборудованием. Реализация алгоритмов кинематики и дискретизации траектории позволяет формировать плавные перемещения с постоянной скоростью, что в свою очередь снижает риск повреждения чувствительных поверхностей и повышает общую надёжность технологического процесса.
Литература:
- Learn microsoft [Электронный ресурс] Руководство по языку программирования С#: https://learn.microsoft.com/ru-ru/dotnet/csharp/
- Абрамян А. В., Абрамян М. Э. Разработка пользовательского интерфейса на основе технологии WPF — Ростов-на-Дону: ЮФУ, 2017.
- Microsoft [Электронный ресурс] Visual Studio: https://visualstudio.microsoft.com
- Арора Г., Чилберто Д. Паттерны проектирования для C# и платформы.NET Core — Санкт-Петербург, 2021.
- Роберт Мартин. Чистая архитектура. Искусство разработки программного обеспечения. — СПб.: Питер, 2018. — 352 с. ISBN 978–5-4461–0772–8 54.

