Введение . Надёжность реализации силы сцепления между колёсами локомотивов и рельсами является критическим фактором эффективности и безопасности движения поездов. Боксование (в режиме тяги) и юз (при торможении) приводят к снижению тяговых и тормозных качеств, повышенному износу элементов пути и подвижного состава, а также срыву графика движения. Одним из наиболее распространённых и эффективных способов повышения коэффициента трения в зоне контакта является подача кварцевого песка в струе сжатого воздуха [1]. Несмотря на длительную историю применения, существующие системы пескоподачи обладают рядом существенных недостатков, что определяет актуальность их дальнейшего совершенствования.
Анализ существующих систем на примере электровоза 2ЭС6 . Система пескоподачи электровоза 2ЭС6 включает песочные бункеры объёмом 0,16 м³ каждый, форсунки ФП3–64, трубопроводы, гибкие рукава и электропневматические клапаны [4]. Подача песка осуществляется самотеком из бункеров в форсунки, где происходит смешивание с сжатым воздухом. Регулировка расхода (от 750 до 2000 г/мин) выполняется вручную с помощью регулировочного винта [5].
Основные недостатки системы :
- Отсутствие дистанционного контроля уровня песка в бункерах. Контроль осуществляется методом простукивания, что приводит к повреждению лакокрасочного покрытия и является субъективным [6].
- Импульсный характер подачи, не обеспечивающий равномерного распределения песка по рельсу.
- Низкая скорость истечения песковоздушной смеси (менее 30 м/с), что приводит к сдуванию песка боковым ветром [7].
- Сложность регулировки и обслуживания форсунок, склонность к засорению.
|
|
|


Рис. 1. Примеры повреждения лакокрасочного покрытия песочного бункера
Основным недостатком песочных бункеров на электровозе 2ЭС6, также как и на электровозах серии ВЛ10 (ВЛ10У), ВЛ11 является отсутствие возможности дистанционно определить уровень песка. Локомотивные бригады при приемке электровоза в основном, оборотном депо или в пункте смены локомотивных бригад определяют уровень песка вручную, простукиванием по стенкам песочных бункеров тяжёлым металлическим предметом, и по изменению акустического звучания металла, свойственному границе верхнего слоя песка, делают вывод об остатке сухого песка в бункере. Таким образом метод является субъективным, зависящим от опыта и навыков локомотивной бригады, что не гарантирует определение истинного уровня песка в бункере. От запаса сухого песка на локомотиве зависит расстояние, которое локомотив может пройти без захода в депо для экипировки. Следование локомотива в голове поезда с неисправной системой пескоподачи и опустошенными песочными бункерами запрещено, в этом случае машинист обязан «взять приказ» у дежурного Дирекции тяги на следование с пустым песочным бункером.
Негативным последствием применения метода «постукивания тяжелым предметом» для контроля уровня песка является неизбежное повреждение лакокрасочного покрытия наружной боковой поверхности бункера. Примеры повреждений боковых поверхностей песочных бункеров на электровозе 2ЭС6 приведены на рисунке 1.
Перспективные направления совершенствования систем. Для повышения надёжности и эффективности систем пескоподачи необходимы следующие ключевые улучшения:
- Внедрение систем дистанционного контроля уровня песка на основе емкостных датчиков, с выводом информации на монитор системы управления локомотивом (МПСУиД).
- Разработка систем плавного непрерывного дозирования, адаптивных к изменяющимся условиям эксплуатации.
- Обеспечение повышенной скорости истечения песковоздушной смеси (более 40 м/с) для гарантированной доставки песка в зону контакта.
- Автоматизация управления подачей песка на основе данных о скорости, режиме движения и состоянии рельсов.
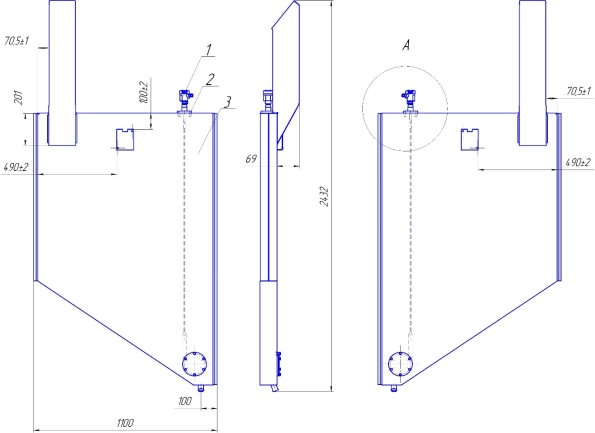
Рис. 2. Внешний вид песочного бункера с установленным уровнемером:
1 — емкостной уровнемер VEGACAL 65; 2 — заклепки резьбовые; 3 — песочный бункер
Информация выводится на монитор машиниста в виде цветовой индикации (процент заполнения). Система также обеспечивает самодиагностику датчиков [6].
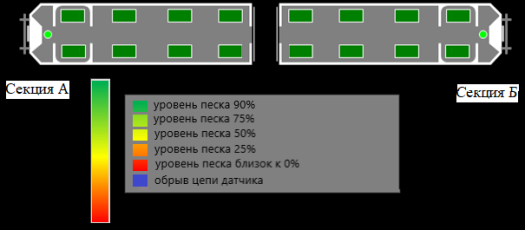
Рис. 3. Вид меню «Уровень песка»
Заключение . Проведенный анализ позволил установить, что существующие системы пескоподачи, несмотря на свою эффективность, обладают существенными недостатками, такими как отсутствие дистанционного контроля, низкая точность дозирования и недостаточная скорость подачи песковоздушной смеси. Внедрение системы дистанционного контроля уровня песка с использованием емкостных датчиков является перспективным направлением, позволяющим повысить эксплуатационную надежность, снизить затраты на обслуживание и улучшить безопасность движения. Дальнейшие исследования должны быть направлены на разработку адаптивных систем управления пескоподачей, интегрированных в комплексные системы управления тяговым подвижным составом.
Литература:
- Коновалов П. Ю. Совершенствование пневматических систем пескоподачи локомотивов и улучшение их эксплуатационных показателей: автореф. дис.... канд. техн. наук. Ростов-на-Дону, 2023.
- Волков И. В., Булавин Ю. П., Коновалов П. Ю. Анализ расхода систем пескоподачи локомотивов для стабилизации величины коэффициента сцепления // Механика и трибология транспортных систем. 2016. С. 101–106.
- Коновалов П. Ю., Булавин Ю. П., Волков И. В. Моделирование локомотивной системы дозированной подачи песка на основе нечеткой логики // Вестник РГУПС. 2020. № 3(79). С. 8–20.
- Калякулин А. Н. Разработка способа контроля песка в песочных бункерах электровоза 2ЭС6 // Эксплуатационная надежность локомотивного парка. Омск, 2022. С. 88–95.
- Трескин С. В. и др. Анализ влияния технического состояния песочных систем локомотивов на количество внеплановых ремонтов // Современные технологии. Системный анализ. Моделирование. 2023. № 3(79). С. 146–158.
- Корсаков Н. В., Линьков А. О. Разработка устройства дистанционного контроля уровня песка в бункере электровоза // Молодая наука Сибири. 2021. № 2(12). С. 17–23.
- Коновалов П. Ю., Яицков И. А. Технические решения по регулированию увеличения скорости управляемого истечения песковоздушной смеси // Вестник РГУПС. 2023. № 1(89). С. 241–247.

