Лабораторный стенд предназначен в первую очередь для знакомства студентами с принципами работы микропроцессорных систем, с возможностями управления электрическим приводом с помощью систем подчиненного регулирования.
Ключевые слова: микропроцессорные системы, электропривод, широтно-импульсная модуляция, двухконтурное регулирование, микроконтроллеры, датчик тока, фотопрерыватель.
В процессе обучения студенты направлений обучения «Электроника и наноэлектроника» и «Электроэнергетика и электротехника» должны познакомиться с принципами построения микропроцессорных систем управления электроприводами. Микропроцессорные системы представлены в виде трех микроконтроллеров различных архитектур:
– микроконтроллер ST STM32 ( Cortex-M3 );
– микроконтроллер TI LM4F120 ( Cortex-M4F );
– микроконтроллер Atmel ATmega328p ( AVR ).
На рисунке 1 представлена функциональная схема устройства.
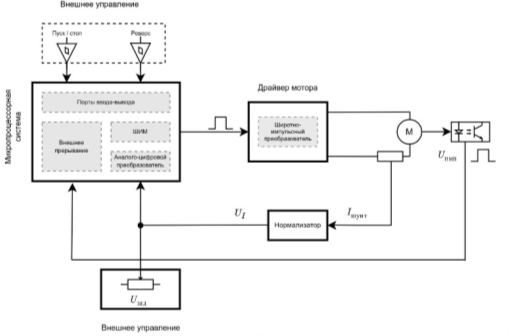
Рис. 1. Функциональная схема стенда
Цель работы — разработка лабораторного стенда согласно представленной схемы для управления цифровым электроприводом постоянного тока.
Микропроцессорная система управление электроприводом выполнена двухконтурной: контур тока и контур скорости.
Поскольку стенд должен сопрягаться с каждым из этих микроконтроллеров, предусмотрено согласование логических уровней для корректной работы каждого из узлов стенда.
Электрический привод представлен в виде коллекторного электродвигателя постоянного тока R370–17315 6.0 V [1] .
Драйвер мотора постоянного тока представлен в виде платы от компании Pololu md30a, основанной на микросхеме MAX14870 [2].
Для осуществления самого управления двигателем выбран самый эффективный и простой в реализации метод — метод широтно-импульсного регулирования с помощью широтно-импульсной модуляции.
Обратная связь по скорости реализована с использованием оптического датчика-фотопрерывателя H92B4 [3], фиксирующего количество фотопрерываний с помощью энкодерного диска, предварительно установленного на вал электродвигателя.
Сигнал задания на контур скорости поступает с потенциометра R4 (рисунок 2). С помощью него можно задавать скважность ШИМ для управления скоростью вращения якоря электродвигателя.
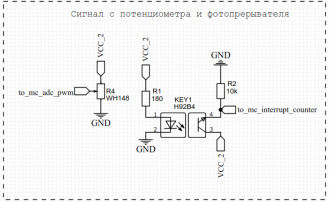
Рис. 2. Принципиальная схема контура скорости
Сигнал обратной связи по току получен с помощью резистора-шунта номиналом 0.1 Ом, который, ко всему прочему, ограничивает пусковой ток двигателя (установлен на плате ШИП) [2].
Исходя из того, что сигнал с резистора крайне мал, возникла необходимость в его усилении с помощью операционного усилителя LM358 [4]. Коэффициент усиления составил 110. Это удовлетворяет требованию о согласовании напряжений для различных плат микроконтроллеров, так как максимальный сигнал будет составлять не более 3.3 В. Принципиальная схема канала измерения тока представлена на рисунке 3.
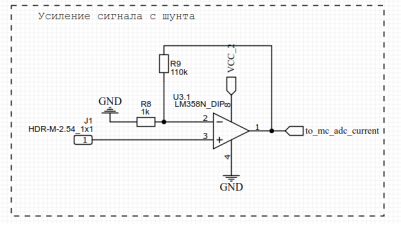
Рис. 3. Принципиальная схема контура тока
Выбор направления вращения электродвигателя и сигнал Пуск/Стоп осуществляется с помощью кнопок SW1, SW2.
При тестовой эксплуатации стенда при нажатии кнопок был замечен дребезг контактов. Было принято решение об установке сборки триггеров Шмитта на микросхемы 74HC14 [5] и ФНЧ на входах триггеров для подавления дребезга (рисунок 4).
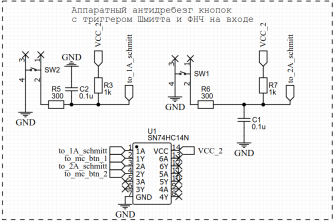
Рис. 4. Принципиальная схема узла приёма сигналов с кнопок
На стенд подаётся два питающих напряжения: напряжение питания узлов платы (3,3В или 5В с микроконтроллера) и напряжение питания двигателя (от внешнего источника). Скорость вращения двигателя (скважность ШИМ) задаётся контуром скорости и поступается с одного из выводом микроконтроллера (МК).
На рисунке 5 представлены переходные процессы скорости и тока, полученные с устройства при пуске электродвигателя. Небольшие пульсации обусловлены несовершенством RC-фильтра.
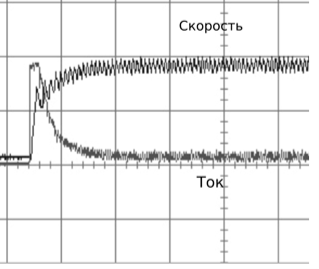
Рис. 5. Переходный процесс тока и напряжения при пуске двигателя
В соответствии с поставленной задачей, был спроектирован, создан и протестирован лабораторный стенд для исследования систем управления электродвигателем (рис. 6), который будет использоваться при проведении лабораторных работ в различных группах на кафедре. Он позволяет оператору менять направление вращения якоря двигателя, запускать/останавливать двигатель, а также позволит применять различные методы управление электрическим приводом с помощью двухконтурной системы управления (контура тока и контура скорости), такие как ПИ-, П-, ПИД-регулирование.
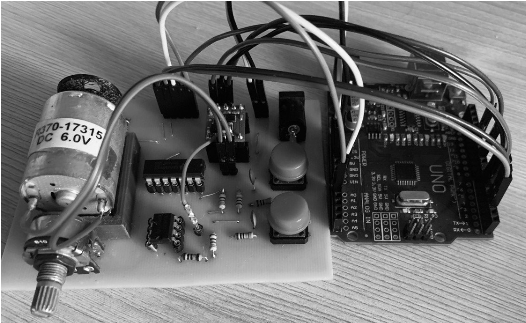
Рис. 6. Внешний вид стенда в связке с микроконтроллером
Совершенствования материально-технической базы кафедры позволит студентам знакомиться с возможностями современных микропроцессорных систем управления, а поскольку в стенде заложена возможность работы от напряжений 3.3 В и 5В, то обучающиеся не будут ограничены в возможностях изучения МК различных производителей и серий.
Литература:
- Электродвигатель R370–17315 6 V. — Текст: электронный // Технические характеристики: [сайт]. — URL: https://static.chipdip.ru/lib/585/DOC000585189.pdf (дата обращения: 17.04.2022).
- Pololu MAX14870 Motor DC Driver. — Текст: электронный // Datasheet: [сайт]. — URL: https://www.pololu.com/product/2961 (дата обращения: 16.04.2022).
- H92B4 photointerrupter. — Текст: электронный // Datasheet: [сайт]. — URL: http://radiocom.dn.ua/image/data/pdf/H92B4_ZC.pdf (дата обращения: 16.04.2022).
- LM358 operational amplifier. — Текст: электронный // Datasheet: [сайт]. — URL: https://www.ti.com/lit/ds/symlink/lm358.pdf (дата обращения: 16.04.2022).
- SNx4HC14 Hex Inverters with Schmitt-Trigger Inputs. — Текст: электронный // Datasheet: [сайт]. — URL: https://www.ti.com/lit/ds/symlink/sn74hc14.pdf (дата обращения: 16.04.2022).

