В статье описана разработка мехатронного узла токарного станка, с возможностью в автоматическом режиме контролировать скорость вращения электродвигателя узла по закону регулировании. Осуществлён выбор подходящих компонентов станка. Обеспечен высокий момент на шпинделе станка. Разработана система выходных параметров.
Ключевые слова: токарный станок, мехатронный узел, электродвигатель, закон регулирования.
Задача разработки данного мехатронного узла для токарного станка заключается в:
‒ увеличение работоспособности всей системы дереобрабатывающего станка.
‒ увеличение момента на шпинделе станка.
‒ осуществление контроля выходных параметров (число оборотов на шпинделе и на валу двигателя).
Данная разработка является модернизацией любого токарного станка, в котором нет мехатронных узлов или подобных систем управления, реализующую схожую задачу.
Работоспособность данной системы проверялась в сборке на стенде. Все вышеперечисленные задачи были реализованы и протестированы. Нужные параметры для станка получились вполне достаточными.
При необходимости есть возможность корректировки, что увеличит точность и надежность системы.
Сначала была решена задача по увеличению момента. Для этого была использована коробка скоростей с понижающей передачей. Это позволило в 15 раз увеличить момент на шпинделе, при этом скорость вращения уменьшилась в 10 раз.
Первая передача — Ременная, с вала двигателя на первый вал коробки скоростей:
|
|
(1) |
Где (1.1) это формула расчета передаточного отношения ременной передачи. D1 и D2 диаметры шкивов в миллиметрах, ведущее к ведомому соответственно, то есть диаметр шкива двигателя к диаметру шкива на первом валу коробки скоростей. Дальше, идет передача с первого вала коробки скоростей на второй вал через зубчатую передачу.
Передаточное отношение так же рассчитывается по формуле:
|
|
(2) |
где Z1 и Z2 — отношение числа зубьев колеса ведущего к ведомому.
Данная передача также является понижающей.
По результатам расчетов был собран стенд, включающий в себя основные компоненты разрабатываемого мехатронного узла (рис. 1).
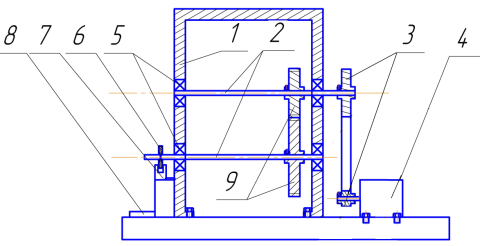
Рис. 1. Чертеж стенда: 1- корпус коробки скоростей 2 — вал I и вал II 3 — колеса ременной передачи 4 — асинхронный двигатель 5 — подшипники качения 6 — решетчатое колесо датчика 7 — датчик скорости 8 — микроконтроллер 9 — колеса зубчатой передачи
Двигатель подобран под оптимальную работу стенда. Характеристики используемого двигателя: трехфазный асинхронный двигатель, номинальная мощность Pн=25 Ватт, номинальная частота вращения nн=1300об/мин (обороты в минуту).
В численном передаточные отношения выглядят так:
iрем=![]() =
=![]()
iзп=![]() =
=![]()
Вращательный момент на валу двигателя:
|
Мдв= |
(3) |
где Pн — мощность двигателя в ватах, nн — номинальная частота вращения двигателя в оборотах в секунду.
Вращательный момент на валу недостаточен для работы на токарном станке, но подходит для проверки алгоритма управления.
Расчет момента и частоты вращения после всех передаточных отношений.
Частота вращения:
|
n=nн*iрем*iзп |
(4) |
n=1300*![]() *
* ![]() =130об/мин
=130об/мин
Вращательный момент на шпинделе после передаточных отношений:
|
Мш= |
(5) |
где J — произведение ременной и зубчатой передачи, ![]()
Мш=![]()
Вращательный момент шпинделя в несколько раз выше, момента на валу двигателя, что позволяет выдерживать большую нагрузку без стопорения двигателя.
Система контроля скорости состоит из микроконтроллера Arduino UNO c использованием датчика скорости вращения FC-03.
Данный датчик состоит из светодиода (источника света) и фоторезистора (приемник света). При попадании непрозрачной платины между ними, происходит перекрывание источника света и фототранзистор закрывается. Каждое такое закрытие или открытие происходит из-за вращения решётчатого колеса стоящего на валу шпинделя. Программа микроконтроллера считывает эти закрытия и открытия фоторезистора и переводит их в скорость вращения. [1]
Структурная схема системы автоматического управления (рис.2):
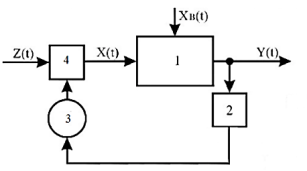
Рис. 2. Структурная схема системы АУ:
1-Объект управления
2-Измерительный прибор
3-Исполнительный механизм
4-Регулирующий орган
Данную систему можно реализовать на любом токарном станке, увеличивая его показатели качества. Установка, сборка и наладка данной системы не занимает много времени и практически не требует особых навыков. Стоимость используемых электрических компонентов не превышает 1500 рублей.
Литература:
- Датчик FC-03 // АрудиноКит. URL: arduinokit.ru/catalog/id/datchik-skorosti-vrascheniya (дата обращения: 29.05.2018)

