




Статья раскрывает сущность активного рулевого управления, принцип работы, преимущества и недостатки его применения, проводиться анализ и сравнение рулевых управлений, работающих по разным принципам.Кроме того, описывается проблема, связанная с обеспечением безопасности дорожного движения и значение применения активного рулевого управления в отечественном автомобилестроении.
Ключевые слова: рулевое управление, безопасность дорожного движения.
Современный мир сложно представить без автомобилей. Как известно автомобиль является средством повышенной опасности и обеспечение безопасного управления им является важнейшей задачей в системе обеспечения безопасности дорожного движения. Одним из путей решения задачи обеспечения безопасного управления автомобилем является разработка рулевого управления автомобиля, которое будет способствовать облегчению управления транспортным средством и повысит управляемость автомобиля при его эксплуатации.
Большинство водителей, садясь за руль транспортного средства, не имеют представления о том, что такое рулевое управление. Рулевое управление — это система управления направлением движения транспортного средства с помощью рулевого колеса, оно состоит из механизмов, преобразующих положение руля в пропорциональное изменение положения управляемых колёс или аналогичных управляющих направлением движения элементов.
В большинстве транспортных средств используется обычное рулевое управление с постоянным передаточным числом, при этом значение передаточного числа достаточно велико. Такое управление имеет положительные и отрицательные стороны. К положительным можно отнести низкую склонность к передаче ударов от дорожных неровностей с управляемых колёс на рулевое колесо, возможность передачи больших усилий, безопасное вождение на повышенных скоростях. Недостатками являются трудности при парковке и вождении в стеснённых условиях, так как количество оборотов рулевого колеса от упора до упора достаточно велико.
В современном мире огромным прорывом в области управления транспортным средством является применение активного рулевого управления, особенность которого заключается в изменении передаточного числа рулевого механизма, в зависимости от скорости движения транспортного средства, и воздействия водителя на рулевое колесо, что облегчает и повышает безопасность управления транспортным средством.
Одним из таких рулевых управлений является разработка инженеров BMW, носящая название система активного рулевого управления AFS. Суть разработки состоит в том, чтобы изменять реакцию колёс на вращение руля в зависимости от скорости машины. Так, к примеру, если вы решили припарковаться в сложном для этого месте, вам не придётся крутить рулём по несколько оборотов, чтобы вывернуть колеса — электроника отследит скорость, и передаточное число рулевого механизма снизиться до минимума. На больших скоростях такая реакция, наоборот, вызывает дискомфорт и даже опасна, поэтому передаточное число увеличивается, и машина реагирует на руль более плавно. Можно подумать, что система активного рулевого управления очень сложна. На самом деле это не так, и принцип её работы довольно прост.
Ключевыми элементами AFS является: планетарный редуктор, блок управления, комплект датчиков [1].
Данная технология неразрывно связана с механизмом рулевого управления. В целом все выглядит так: в разрез рулевого вала вмонтирован блок с планетарным редуктором (рис. 1), внутри которого находится солнечная и эпициклическая шестерни, блок сателлитов и электродвигателей. Принцип работы данной системы заключается в следующем.

Рис. 1. Разрез рулевого вала с планетарным редуктором система активного рулевого управления AFS
При движении автомобиля на поворотах при небольшой скорости, электродвигатель (рис. 2) подкручивает в одну сторону коронную шестерню, тем самым увеличивает передаточное число. При движении на больших скоростях электродвигатель подкручивает коронную шестерню в другую сторону, тем самым уменьшает передаточное число.
Исходя из такого принципа работы можно сделать вывод о том, что при воздействии на рулевое колесо управляемые колёса автомобиля будут поворачиваться на необходимый угол для обеспечения хорошей управляемости и безопасности движения.
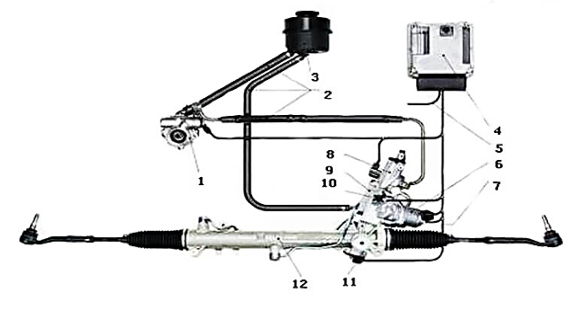
Рис. 2. Схема активного рулевого управления AFS: 1 — насос гидроусилителя руля; 2 — шланги; 3 — бачок для рабочей жидкости; 4 — электронный блок управления; 5 — шина обмена данными; 6 — электродвигатель; 7 — датчик угла поворота электродвигателя; клапан системы Servotronic; 9 — планетарный редуктор; 10 — аварийный фиксатор;
11 — датчик суммарного угла поворота; 12 — рулевой механизм
Положительной стороной данной системы является то, что есть возможность изменения передаточного числа в зависимости от скорости автомобиля. Недостатком данной системы является наличие червячной передачи, сложность технологии изготовления, а также необходимость применения высокомоментного двигателя.
В 2014 году произошёл «психологический прорыв» в проектировании рулевого управления транспортных средств, связанный с отказом от жёсткой связи между рулевым колесом и управляемыми колёсами. Ярким примером такого рулевого управления является рулевое управление автомобиля Infiniti, марки Q50. Суть указанного типа рулевого управления заключается в том, что рулевое колесо не имеет жёсткой связи с рулевым валом, а поворот колёс осуществляют два электродвигателя, которые перемещают рулевую рейку. Скорость вращения электродвигателей регулируют три независимых блока управления, которые подают соответствующие сигналы на двигатели в зависимости от скорости движения транспортного средства и поворота рулевого колеса. Силовое воздействие на рулевое колесо обеспечивает электродвигатель обратной связи, который в зависимости от условий езды, создаёт необходимое усилие для обеспечения «чувства дороги». Однако у указанного устройства, как и у любого есть свои плюсы и минусы. Положительным является то, что имеется возможность широкого изменения передаточного числа в зависимости от движения данного транспортного средства, за счёт этого повышается безопасность и удобство управления транспортным средством. В отрицательную сторону можно отметить то, что при любом существенном отказе элементов системы включается аварийный режим, обеспечивающий жёсткую связь между рулевым колесом и рулевой рейкой, при этом рулевое управление перестаёт быть активным. Кроме того, из отзывов водителей, обладающих автомобилем с данной системой выявлен ещё один недостаток, заключающийся в том, что при использовании автомобиля в холодных климатических условиях выходит из строя электроника, отказывают блоки управления и система приходит в негодность, из-за чего использовать данный автомобиль довольно критично или даже страшно, особенно на просторах территории Российской Федерации, ведь на первом месте стоит безопасность дорожного движения, а следовательно сохранение жизни и здоровья человека (водителя, пассажира, пешехода) [2].
Таким образом, можно сделать вывод о том, что указанная выше система решает ряд определённых задач, но требует доработок в электронике, чтобы минимизировать отказ системы в различных дорожных условиях. Кроме того, усложняется техническое обслуживание системы рулевого управления водителем, связанная со сложной компоновкой сочленённых узлов, а также непростой электроникой, установленной на этих системах, в которой не каждому водителю дано разобраться.
Несмотря на имеющиеся недостатки, будущее безусловно за системами активного рулевого управления и несомненно скоро мы увидим их новые конструкции.
Анализ аварийности на дорогах Российской Федерации показывает, что в дорожно-транспортных происшествиях (ДТП) ежегодно погибают 27000 человек, и причиной совершения многих ДТП является наличие неисправности одной из систем автомобиля. По сравнению с 2016 годом в 2018 году процент таких ДТП увеличился на 20 %, в том числе в эти 20 % входят проблемы, возникающие с рулевым управлением, порой для предотвращения ДТП не хватает небольшого поворота рулевого колеса.
Проблема обеспечения безопасности дорожного движения, приводит в том числе и к выводу о необходимости разработки в отечественной автомобильной промышленности конструкции активного рулевого управления, что в значительной мере должно привести к сокращению количества ДТП и обеспечить более высокий уровень безопасности дорожного движения на дорогах Российской Федерации.
Литература:
- Журнал «За рулём», № 10, 2002, «На пути к джойстику» А. Фомин стр. 68–72.
- Журнал «За рулём», № 1, 2014, «Драйв нерукотворный», В. Соловьёв, стр. 36–39.
