В статье рассматривается возможность автоматизированного проектирования Lego-роботов в Lego Digital Designer для использования в образовательной робототехнике.
Робототехника в образовании на сегодняшний день это инструмент инженерного образования школьников. Робототехника — это технология интеграции механики, электроники и программирования, позволяющая выявлять и проводить начальное воспитание инженерных талантов, в котором заинтересовано государство в рамках обеспечения новых инженерно-технических кадров [1] и глобального технического превосходства лидерства России к 2035 году [2]. Благодаря появлению массовых конструкторов с их модульными компонентами и простоте программирования стала широкодоступной возможность создания несложных учебных роботов. В настоящее время появилось множество робототехнических конструкторов от различных фирм [3], в том числе и от российских, ориентированных на определённый возраст детей, имеющих определённые плюсы и минусы. В жизни и образовании наиболее популярными наборами конструирования механизмов и роботов на данный момент являются продукты компании Lego, т. к. они охватывает весь контингент детей. Это очень качественный продукт, с которым дети играют с пользой для развития пространственного воображения и моторики пальцев.
У педагогов и тренеров по робототехнике, да и самих обучающихся есть необходимость в моделировании роботов серии Lego, в последующем сохранении в виде трёхмерной модели, создании инструкции по сборке. Необходимость в моделировании также может быть обусловлена по причине нехватки технического оборудования из-за высокой стоимости наборов или отдельных компонентов и может стать существенной проблемой применения робототехнических наборов в учебном процессе, заключающейся в недостаточном количестве комплектов конструкторов. Один Lego-набор серии Mindstorms рассчитан на 2-х человек. Возникает проблема, когда каждая группа может собирать робота не одно занятие, а это значит, что модель приходится разобрать, чтобы последующая группа могла собирать собственную модель. Решением этой проблемы является изначальное трёхмерной моделирование конструкции робота, по которой ученики могут быстро строить робота и заниматься его программированием [6]. Кроме того, когда необходима демонстрация некоторых частей, конструкций робота, а детали Lego достаточно малы и это может затруднить наблюдение и понимание работы конструкции учениками. Снова для решения данной проблемы можно использовать заранее подготовленную конструкцию, которую можно продемонстрировать на большом экране проектора. И наконец, не стоит забывать, что подобные инструменты позволяют работать удалённо. Таким образом, актуальность статьи определена необходимостью в моделировании робототехнических систем продуктов Lego.
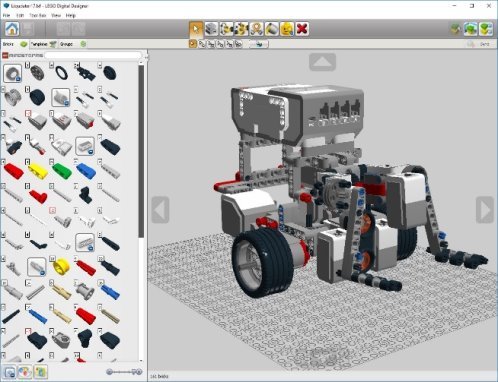
Рис. 1. Окно программы Lego Digital Designer
Наиболее подходящим софтом для автоматизированного проектирования роботов Lego является CAD всё той же компании Lego — Lego Digital Designer (LDD), распространяющейся бесплатно. LDD — это огромный «сундук» с сотнями деталей Lego в одном месте, возможность собирать модели из тех деталей, которых просто не хватает или так и не получилось приобрести. Отличает LDD от аналогов (например, LeoCad, SR 3D Builder, Konstruktor и LDraw) в том, что данный инструмент является наиболее простым для освоения. В LDD наиболее простой интерфейс, с которым справится любой пользователь, будь то ребёнок или взрослый человек. Для юных робототехников LDD это лучший способ познакомить с трёхмерным моделированием, чтобы в последствии познакомиться с более серьёзными средами [5]. Стоит отметить момент, который может доставить неудобство русскоязычному пользователю: интерфейс не переведён на русский язык. Окно программы можно условно поделить на три пространства: левая панель, верхняя панель и рабочее пространство. В левой панели расположены три вкладки, в которых спрятаны строительные элементы (bricks) сгруппированных по тематике, возможность работать с заготовками (templates) и группами (groups). В верхней панели находится меню и панель инструментов. На рабочем пространстве пользователь собирает модели по кирпичикам или разбирает уже готовые, чтобы увидеть структуру модели. Для комфортной работы есть практически все инструменты. Единственное что не хватает, это возможность зеркально клонировать элементы. В отличие от аналогичных программ, детали тут присоединяются друг к другу автоматически. Трехмерные модели сохраняются во внутреннем формате LXF, но возможность экспорта модели в другие форматы, дружественные для программ-аналогов всё же имеется.
LDD умеет создавать инструкции в нескольких вариантах. Первый вариант инструкции генерируется в самой программе (Building guide mode). В этом режиме шаг за шагом детали с анимацией соединяются вместе и можно интерактивно вращать, разглядывать со всех сторон для полного понимания сборки. Единственное, что не редки моменты, когда инструкция сгенерировалась с некими ошибками, связанными с последовательностью сборки, но возможности самому пользователю как-то перестроить, объединить шаги или выбрать иную вариацию сборки некоторых шагов просто нет. Второй вариант (HTML building guide) инструкции генерируется в виде HTML-странички с ресурсными файлами и получается менее удобным, где на странице по нажатию на кнопки управления просто меняются картинки. Более того встречаются все те же самые «болячки», что и в режиме «Building guide mode», которые не лечатся, а инструкция получается менее интерактивной. Нахожу, что интерактивные инструкции, когда можно что-то вращать и рассматривать, являются наиболее удобными для юных робототехников, нежели это были бы просто картинки, например, в виде пошаговых pdf инструкций. Убеждён, что дети с развитым конструкторским навыком, пространственным мышлением могут повторить сборку робота просто смотря на него с разных сторон. Никак не учитывается физика и полностью отсутствует возможность симуляция работы механизмов, которая, например, есть в SR 3D Builder.


Рис. 2. Варианты инструкций модели (слева — «Building guide mode», справа — HTML building guide)
В итоге получаем инструментарий, который без труда позволяет создавать трёхмерные модели роботов, хранить в интерактивном формате и обмениваться моделью с единомышленниками.

Рис. 3. Модель робота (Riley Rover BI), использованная в эксперименте
При работе с трёхмерным редактором возникла следующая гипотеза: не тратится ли больше времени на сборку трёхмерной модели робота в LDD, чем для реальной модели? Для этого был проведён следующий эксперимент. По регламенту эксперимента необходимо было каждому учащемуся не спеша собрать одну и ту же модель робота (представленной в pdf инструкции на компьютере — рис. 3) в виде реальной модели и трёхмерной в LDD. В эксперименте участвовало 10 обучающихся объединения «Робоквантум» детского технопарка «Кванториум» города Чебоксары уже владеющих навыками сборки и моделирования роботов в LDD Lego-роботов. При сборке реальной (материальной) модели робота все детали, которые необходимо было использовать при сборке были разложены в наборе конструктора подобающим образом (т. е. исходя из брошюры правил размещения деталей). Для обработки эксперимента был выбран критерий знаков, где происходит сравнение величин двух попарно сопряжённых совокупностей (зависимых выборок), т. е. таких совокупностей, которые объединены некоторой связью, общим свойством. Это могут быть результаты одних и тех же испытуемых по двум каким-то разным видам деятельности, балловые оценки, выставленные учителем за двукратное выполнение одной и той же или различных работ одной и той же группой учащихся [7].
Проверяется гипотеза H0: время сборки трёхмерной модели робота в LDD занимает больше времени, чем время сборки реальной модели, при альтернативе H1: время сборки виртуальной модели в LDD изменилось в отличии от времени сборки реальной (материальной) модели. Данные задачи представлены в таблице 1. Нулевая гипотеза принимается на уровне значимости 0,05. Подсчитаем число минусов, как встречающихся наименее часто: Zнабл=2, что говорит о преимущественном преобладании величин чисел второго столбца. По таблице «Критические значения статистики критерия знаков находим значение Z0,05(10) = 2. Получили, что эмпирическое (наблюдаемое) значение не больше критического, а это значит мы отклоняем нулевую гипотезу и принимаем альтернативную, что позволяет сделать вывод о том, что скорость разработки робота с применением трёхмерного-моделирования в LLD превосходит сборку с использованием набора-конструктора.
Таблица 1
Результаты эксперимента
|
Обучающийся № |
Время сборки трёхмерной модели (сек) |
Время сборки реальной модели (сек) |
Знак разности отметок |
|
1 |
234 |
247 |
+ |
|
2 |
236 |
251 |
+ |
|
3 |
229 |
245 |
+ |
|
4 |
191 |
239 |
+ |
|
5 |
183 |
234 |
+ |
|
6 |
251 |
243 |
- |
|
7 |
254 |
264 |
+ |
|
8 |
238 |
249 |
+ |
|
9 |
274 |
267 |
- |
|
10 |
242 |
254 |
+ |
Таким образом, трёхмерное моделирование роботов может помочь педагогу улучшить образовательный процесс, например, для того чтобы использовать трёхмерные модели как инструкции по сборке, решение проблемы при нехватке в образовательном учреждении наборов-конструкторов, при подготовке к занятию в удалении, например, дома, а также при демонстрации конструкций на большом экране.
Литература:
- О программе «Робототехника: инженерно-технические кадры инновационной России» [Электронный ресурс] / «Робототехника: инженерно-технические кадры инновационной России». — URL: http://russianrobotics.ru/about-the-program/general-information/.
- НТИ [Электронный ресурс] / Агентство стратегических инициатив. — URL: https://asi.ru/nti/.
- Образовательная робототехника — инструмент инженерного образования школьников [Электронный ресурс] / Занимательная робототехника. — URL: https://goo.gl/Z6AQTK.
- Lego Digital Designer для всех [Электронный ресурс] / Inoschool.ru. — URL: http://inoschool.ru/novosti/item/62-bricker-ldd-lego-digital-designer-dlya-vsekh.
- Лекция 2.3. Трехмерное моделирование | Курс: Основы робототехники [Электронный ресурс] / YouTube. — URL: https://goo.gl/NZwgsA.
- Дружкина И. Ю., Гусева Е. Н. Проблемы формирования и развития навыков моделирования у учащихся среднего звена в рамках кружка по робототехнике // Современная педагогика. 2014. № 6 [Электронный ресурс]. URL: http://pedagogika.snauka.ru/2014/06/2458.
- Софронова Н. В. Введение в педагогическое исследование: учебное пособие для студентов, обучающихся по педагогическому направлению бакалавриата / Н. В. Софронова / — Чебоксары: Перфектум, 2015. — 242 с.

