В статье рассматриваются возможности применения в робототехнике виртуальной среды, позволяющей симулировать работу робота, а также взаимодействие его с объектами в виртуальном пространстве.
Ключевые слова: виртуальная среда, робототехника, образование.
The article discusses the possibilities of using a virtual environment in robotics that allows simulating the work of a robot, as well as its interaction with objects in virtual space.
Keywords: virtual environment, robotics, education.
Актуальность применения виртуальной среды позволяющий имитировать (симулировать) работу робота в виртуальном пространстве обусловлена относительной дороговизной обучающих наборов, в возможности работы удалённо от конструктора, в возможной экономии времени и материальных ресурсов, т. к. нет необходимости в сборке робота и изготовлении полигона (площадки для робота).
Наиболее распространёнными образовательными робототехническими наборами на данный момент в России являются образовательные конструкторы компании Lego серии WeDo и Mindstorms, которые позволяют охватить практически все возрастные группы обучающихся [1].
Под виртуальной реальностью (средой) следует понимать созданную компьютером трехмерную модель среды, позволяющая пользователю почувствовать иллюзию реальности, в которой чувства пользователя заменяются их имитацией генерируемой компьютером, а объекты ведут себя аналогично объектам материальной реальности, где имитирована физика, подобная реальной (гравитация, свойства объектов, столкновение с предметами и т. п.).
В настоящее время существуют программные средства компьютерного моделирования, применимых в обучении робототехники, позволяющие имитировать не только геометрические размеры, но и физические свойства, как реальных роботов, так и их прототипов [2].
Рассмотрим ряд программных разработок, применимых для образовательной робототехники Lego.
Первыми разберем программные среды моделирования Lego роботов. Такими являются Lego Digital Designer, LeoCad и LDraw. LDraw это открытый стандарт программ (MLCad, LDCad, LDView, LPub и др.), позволяющие создавать виртуальные модели и сцены [3]. Например, можно задокументировать физически собранные модели и даже сделать анимацию. Отдельно выделим разработку Lego Digital Designer, с которой можно приобщить к моделированию каждого, т. к. имеет интуитивно-понятный интерфейс. Все вышеперечисленные программы моделирования роботов могут помочь в составлении инструкции по сборке робота.
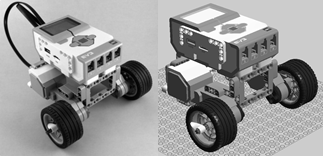
Рис. 1. Фотография реального робота и скриншот виртуальной модели робота в Lego Digital Designer
Следующими рассмотрим программные среды, позволяющие имитировать работу Lego роботов в виртуальном пространстве (Robot Virtual Worlds, MS Robotics Studio, Virtual Robotics Toolkit).
Одна из программ Robot Virtual Worlds — LEGO 4.x (RVW), слоган которой на странице сайта звучит: «No Robot, No Problem!». Сами разработчики, ссылаясь на свои исследования заявляются, что обучение программированию в RVW более эффективно, чем обучение программированию с использованием физических роботов [4]. Работа с RVW требует приобретения целого комплекта программ, т. к. иначе возможности будут сильно ограничены, например, программу для построения своей виртуальной площадки.
Высокий уровень реализма обеспечивает Virtual Robotics Toolkit (VRT) [5], разработанная на Unity 5, позволяющая имитировать роботов серии Lego Mindstorms NXT и EV3 в идеализированных условиях. В VRT возможно проводить эксперименты с тем, как изменение сил трения на игровой поверхности, положения датчиков покажут, как ваш робот будет вести себя в определённых условиях. VRT имеет возможность импортировать модели роботов, созданные с помощью ряда бесплатных редакторов, например MLCad, LDCad или Lego Digital Designer. VRT позволяет создавать виртуальные пространства из различных примитивов, устанавливая им графические текстуры, массу, выбрать тип материала, добавлять источники света и другое, т. е. позволяет быстро создавать пространство работы для робота. VRT существует возможность вручную управлять движением робота, а также имеет возможность выполнять написанные пользователем программы, разработанных в поставляемых с наборами визуальной среды программирования. Но на данный момент VRT пока не может позволить переход с визуальных языков программирования на текстовые языки, таких как C или Basic (среды программирования ROBOTC, MS Small Basic).
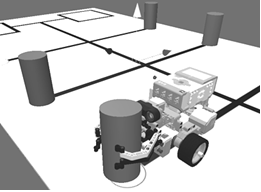
Рис. 2. Имитация манипулирования предметами роботом в виртуальной среде VTR
Обозначим просматриваемые возможности виртуальных сред для образовательной робототехники. Во-первых, виртуальные модели роботов могут послужить интерактивными 3D инструкциями, дающие очень точные модели, максимально приближённых к реальности с возможностью тщательной проработки и деления на составные части для представления в виде отдельных частей. Во-вторых, виртуальные среды позволяют проверить все механические узлы модели робота, перед постройкой реальной физической модели, экономя время на постройке реальных прототипов. В-третьих, виртуальная среда позволит имитировать различные учебные ситуации на смоделированной площадке экономя время её подготовки и материальные ресурсы, чтобы отработать соответствующие умения и навыки по конструированию и программированию. В-четвёртых, виртуальные среды дают возможность сборки и имитации работы робота, при отсутствии возможности работы с физической моделью робота. В-пятых, работа в виртуальной среде даёт развитие умений и навыков по проектированию предметного мира, осуществления абстрактных образов, представляя обучающему инструмент моделирования, позволяет развивать творческие способности учащихся, а также овладевать моделированием как методом познания.
Проведённый обзор отображает целесообразность использования виртуальных сред для обучения образовательной робототехники. Их использование позволит совершенствовать разработку роботов и программ, экономить время и ресурсы на проведение различных экспериментов, а также перечисленные выше инструменты могут быть особенно полезны для тех, кто заинтересован робототехнике, но не имеет робототехнического набора.
Литература:
- Вегнер К. А. Внедрение основ робототехники в современной школе // Вестник НовГУ. — 2013. — № 74. URL: https://cyberleninka.ru/article/n/vnedrenie-osnov-robototehniki-v-sovremennoy-shkole.
- Виртуальные 3D среды как средство верификации и тестирования робототехнических систем / А. Г. Зыков, А. В. Межерин, В. И. Поляков // Приоритетные научные направления: от теории к практике. — 2016. — № 21. URL: https://elibrary.ru/item.asp?id=25340150.
- Как сделать пошаговую инструкцию LEGO (создание модели в MLCad + LSynth) [Электронный ресурс] / ПрогХаус. — URL: http://www.proghouse.ru/article-box/37-mlcad.
- Robot Virtual Worlds [Электронный ресурс] / Robot Virtual Worlds. — URL: http://www.robotvirtualworlds.com/.
- Virtual Robotics Toolkit [Электронный ресурс] / Virtual Robotics Toolkit. — URL: https://www.virtualroboticstoolkit.com/.

