




Целью данной работы является овладение технологией сборки модели электропривода на базе бесконтактного двигателя постоянного тока (БДПТ), подключенного к шестишаговому инвертору,в пакете SimPowerSystems для использования в лабораторных работах по дисциплинам «Математическое моделирование электромеханических систем» и «Электрический привод». За основу принята математическая модель из электронного ресурса [1]. Показаны пути поиска разделов необходимых элементов схемы электропривода, позволяющих студентам без больших потерь времени получить необходимые характеристики. Полезные рекомендации по работе в SimPowerSystems даны в работах [2], [3], [4], [5].
Общая схема электропривода на базе БДПТ приведена на рис. 1.
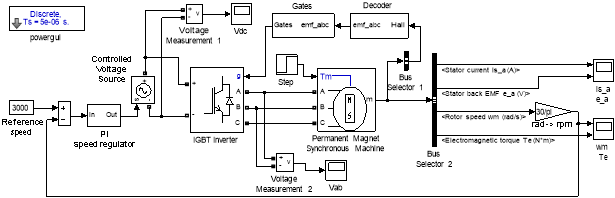
Рис. 1. Электропривод на базе БДПТ
Бесконтактный двигатель постоянного тока представлен блоком Permanent Magnet Synchronous Machine из раздела Machines библиотеки SimPowerSystems (рис. 2). Инвертор напряжения (IGBT Inverter) представлен блоком Universal Bridge из раздела Power Electronics (рис. 2).
Наброс нагрузки моделируется в блоке Step (библиотека Simulink, раздел Sources). В этом блоке необходимо задать:
− время наброса нагрузки (Step time): 0.1;
− начальное значение (Initial value): 0;
− конечное значение (Final value): 3;
− шаг модельного времени (Sample time): 0.
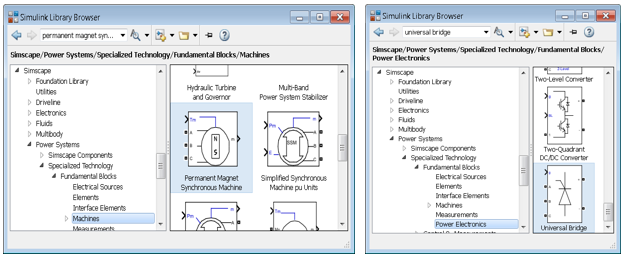
Рис. 2. Расположение блоков БДПТ и инвертора напряжения
Параметры БДПТ даны на рис. 3.
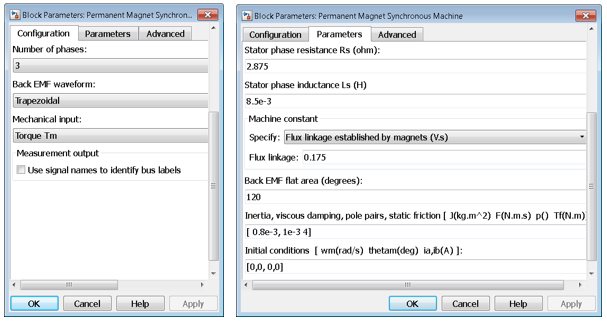
Рис. 3. Параметры БДПТ
Параметры инвертора напряжения даны на рис. 4.
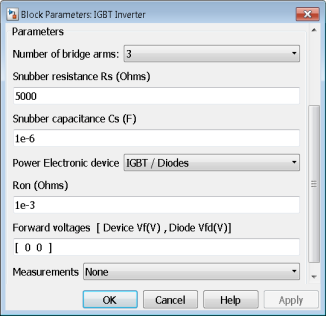
Рис. 4. Параметры инвертора напряжения
Блок управляемого источника напряжения (Controlled Voltage Source) находится в разделе Electrical Sources библиотеки SimPowerSystems (Simscape) (рис. 5). В этом блоке следует задать напряжение 500 В (рис. 5).
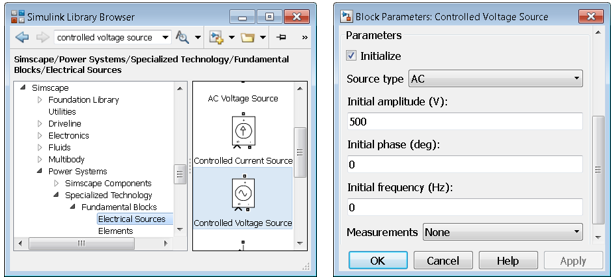
Рис. 5. Расположение блока управляемого источника напряжения и его параметры
ПИ-регулятор скорости (PI speed regulator) показан на рис. 6. Его схему необходимо собрать в отдельном субблоке Subsystem (библиотека Simulink, раздел Ports & Subsystems). Пропорциональная часть регулятора (Proportional) задана блоком Gain (Simulink/Math Operations), интегральная часть (Integral) - блоком Transfer Fcn (Simulink/Continuous). Ограничитель сигнала (Saturation) находится в разделе Simulink/Discontinuities. Его параметры указаны на рис. 6.
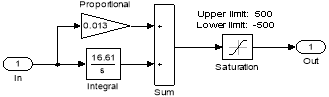
Рис. 6. ПИ-регулятор скорости
Декодер (Decoder) и блок ключей инвертора (Gates) представлены на рис. 7 и 8. Обе схемы собраны в субблоках Subsystem.
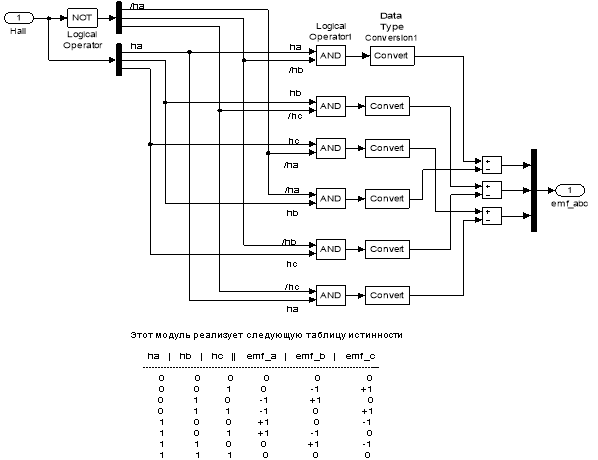
Рис. 7. Блок декодера (Decoder)
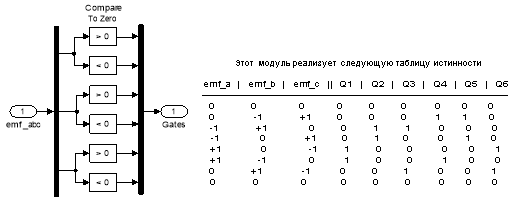
Рис. 8. Блок логических ключей инвертора (Gates)
Логические операторы (Logical Operator) NOT и AND, а также блоки сравнения с нулём (Compare To Zero) находятся в разделе Logic and Bit Operations библиотеки Simulink (рис. 9). Преобразователь типа сигнала (Data Type Conversion) – в разделе Signal Attributes (рис. 9).
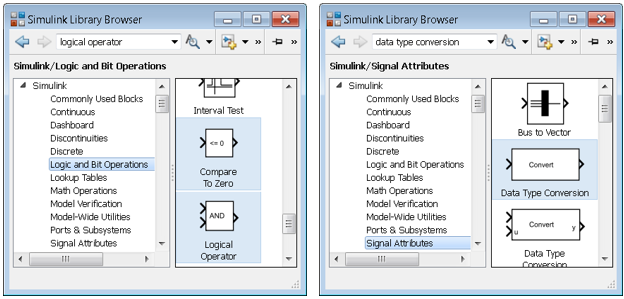
Рис. 9. Расположение блоков логических операторов, сравнения с нулём и преобразования типа сигнала
Шинные селекторы (Bus Selector 1 и 2) позволяют передавать сигналы из блока БДПТ на декодер или на осциллографы. Для передачи данных на декодер необходимо в параметрах Bus Selector 1 из списка слева (Signals in the bus) выбрать сигналы Hall effect signal (h_a, h_b и h_c), добавить их в список выбранного (Selected signals) кнопкой Select и поставить галочку в пункте Output as bus (рис. 11).
Расположение блока Bus Selector в разделе Signal Routing библиотеки Simulink показано на рис. 11.
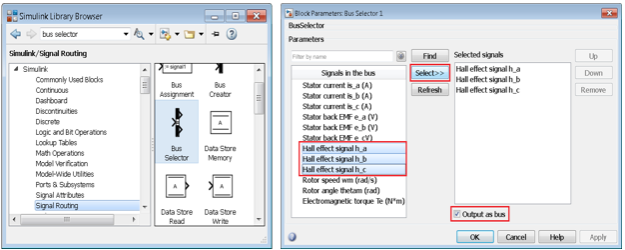
Рис. 11. Расположение блока Bus Selector и выбор сигналов в блоке Bus Selector 1
Аналогичным образом в Bus Selector 2 выбираем ток (Stator current is_a), ЭДС (Stator back EMF e_a), скорость (Rotor speed wm) и электромагнитный момент (Electromagnetic torque Te) для вывода этих характеристик на осциллографы.
Для перевода скорости из рад/с в об/мин в блоке Gain необходимо установить значение 30/pi.
Напряжения Vdc и Vab измеряются и отображаются в виде графиков на осциллографах с помощью блока Voltage Measurement из раздела Measurements библиотеки SimPowerSystems (рис. 12).
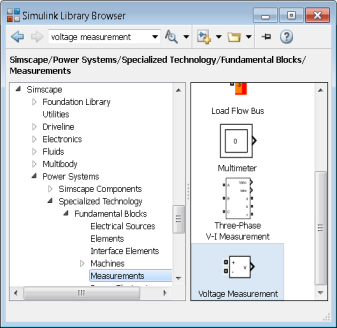
Рис. 12. Расположение блока измерителя напряжения (Voltage Measurement)
Для работы модели необходим блок Powergui (раздел Fundamental Blocks библиотеки SimPowerSystems), параметры которого приведены на рис. 13.
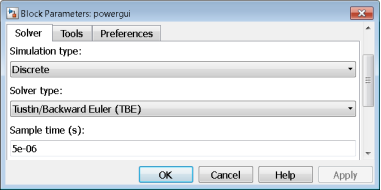
Рис. 13. Параметры блока Powergui
Результаты моделирования электропривода на базе бесконтактного двигателя постоянного тока даны на рис. 14 и 15.
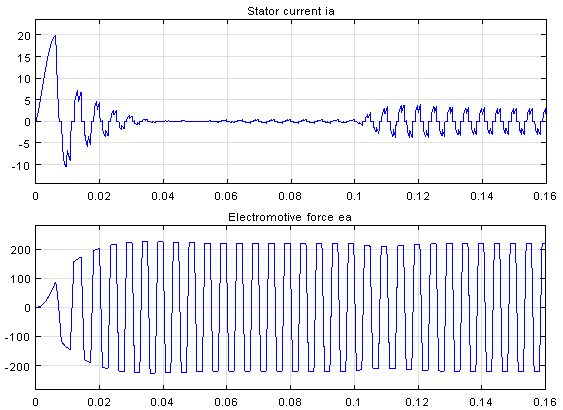
Рис. 14. Графики статорного тока ia и ЭДС ea
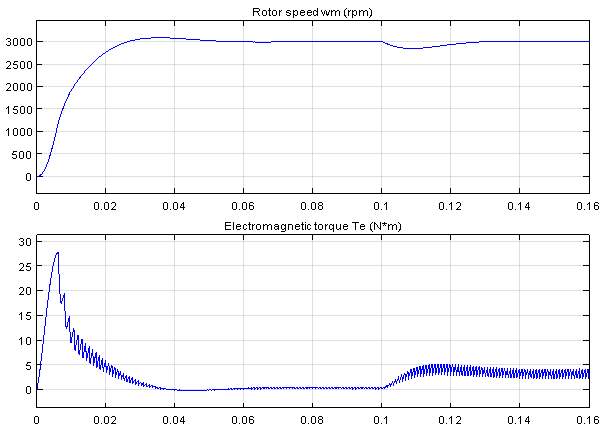
Рис. 15. Графики скорости и электромагнитного момента с набросом нагрузки на двигатель при t = 0,1 с
Примечание: во избежание ошибок при запуске расчета модели необходимо открыть меню Simulation, выбрать Model Configuration Parameters. В открывшемся окне в меню Diagnostics перейти к пункту Connectivity и установить значение Mux blocks used to create bus signals: error, как показано на рис. 16.
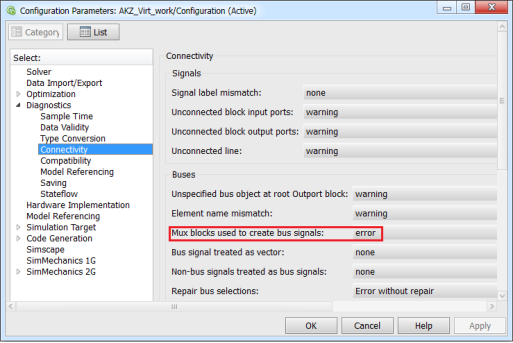
Рис. 16. Окно параметров модели
Литература:
- SimscapePowerSystemsExamples [Электронный ресурс] // MathWorks. - Режим доступа: www.mathworks.com/help/physmod/sps/examples.html.
- Герман-Галкин С. Г. Matlab & Simulink. Проектирование мехатронных систем на ПК. – СПб.: КОРОНА-Век, 2008. – 368 с.
- Герман-Галкин С. Г. Компьютерное моделирование полупроводниковых систем в MATLAB 6.0: Учебное пособие. – СПб.: КОРОНА принт, 2007. – 320 с.
- Черных И. В. Моделирование электротехнических устройств в MATLAB, SimPowerSystems и Simulink. – М.: ДМК Пресс; СПб.: Питер, 2008. – 288 с.
- Терёхин В. Б. Моделирование систем электропривода в Simulink (Matlab 7.0.1): учебное пособие / В. Б. Терёхин; Национальный исследовательский Томский политехнический университет. – Томск: Изд-во Томского политехнического университета, 2010. – 292 с.
