Целью данной работы является овладение технологией сборки модели прямого пуска асинхронного двигателя с ШИМ в пакете SimPowerSystems для использования в лабораторных работах по дисциплинам «Математическое моделирование электромеханических систем» и «Электрический привод». За основу принята математическая модель из электронного ресурса [1]. Показаны пути поиска разделов необходимых элементов схемы электропривода, позволяющих студентам без больших потерь времени получить необходимые характеристики. Полезные рекомендации по работе в SimPowerSystems даны в работах [2], [3], [4], [5].
Общая схема модели электропривода приведена на рис. 1.
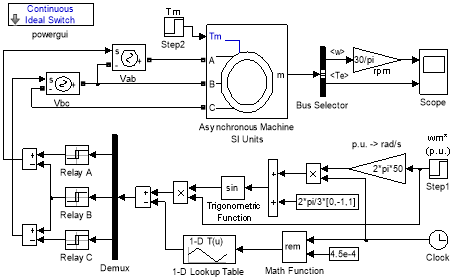
Рис. 1. Электропривод на базе трехфазного асинхронного двигателя с ШИМ
Блок асинхронного двигателя (Asynchronous Machine SI Units) находится в разделе Machines библиотеки SimPowerSystems (рис. 2). Напряжения с ШИМ поступают на асинхронный двигатель через блоки согласования Simulink и SimPowerSystems Vab и Vbc (Controlled Voltage Source) из раздела Electrical Sources (рис. 2).
Параметры асинхронного двигателя представлены на рис. 3. Параметры блоков Vab и Vbc задаются нулевыми.
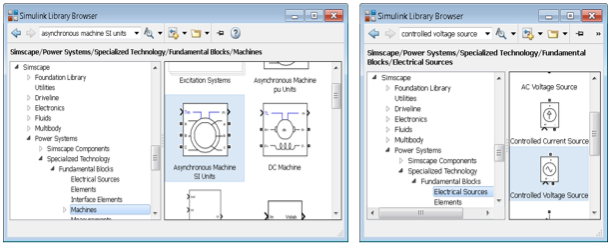
Рис. 2. Расположение блоков асинхронного двигателя (Asynchronous Machine SI Units) и согласования Simulink и SimPowerSystems (Controlled Voltage Source)
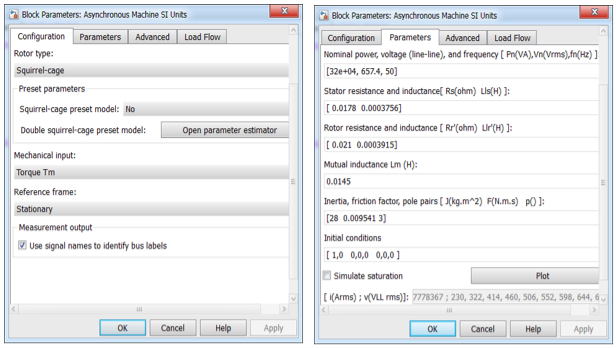
Рис. 3. Параметры асинхронного двигателя
Задание скорости ωm* производится блоком Step1, наброс нагрузки Tm – блоком Step2 (библиотека Simulink, раздел Sources). Параметры этих блоков даны на рис. 4.
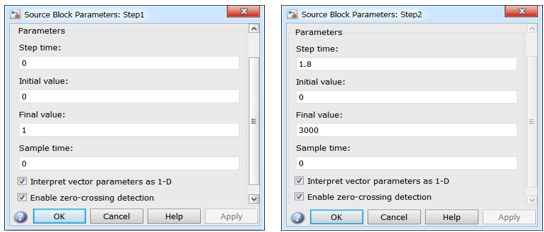
Рис. 4. Параметры блоков задания скорости (Step 1) и наброса нагрузки (Step 2)
Блок Gain, а также блоки Math Function и Trigonometric Function находятся в разделе Math Operations библиотеки Simulink (рис. 5). Блок одномерной матрицы 1-D Lookup Table – в разделе Lookup Tables (рис. 5). Параметры этих блоков даны на рис. 6.
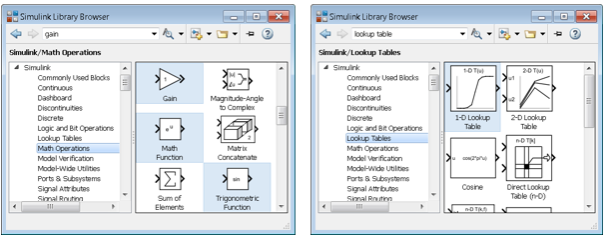
Рис. 5. Расположение блоков Gain, Math Function, Trigonometric Function и 1-D Lookup Table
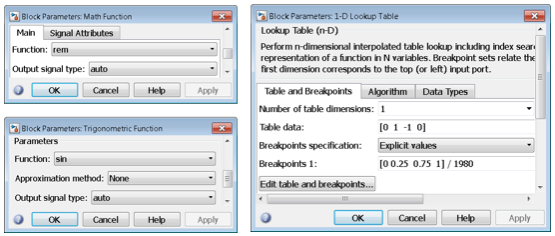
Рис. 6. Параметры блоков Math Function, Trigonometric Function и 1-D Lookup Table
В источнике временного сигнала Clock (раздел Simulink/Sources) следует установить параметр Decimation равным 10. С помощью блока Constant с выражением 2*pi/3*[0,-1,1] обеспечивается сдвиг трехфазных синусоидальных напряжений на 120°.
В блоках Relay (раздел Simulink/Discontinuities) по фазам A, B и C задаются одинаковые параметры, приведенные на рис. 7.
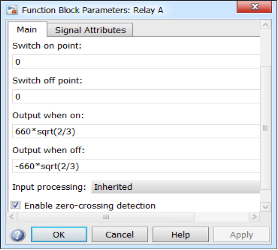
Рис. 7. Параметры блоков Relay A, B и C
Блок шинного селектора (Bus Selector) предназначен для измерения характеристик машины. В библиотеке Simulink раскрываем следующий путь до группы блоков «Разводка сигнала» (Signal Routing) (рис. 8). Переносим блок Bus Selector на рабочее поле.
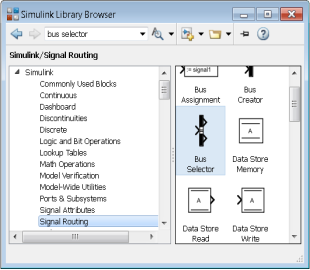
Рис. 8. Расположение блока Bus Selector в окне библиотеки Simulink
Открываем блок шинного селектора. Из списка механических характеристик (Mechanical) выбираем электромагнитный момент (Electromagnetic torque Te (N*m)) и скорость вращения ротора (Rotor speed (wm)) и добавляем их в список выбранного (Selected signals) кнопкой Select (рис. 9).
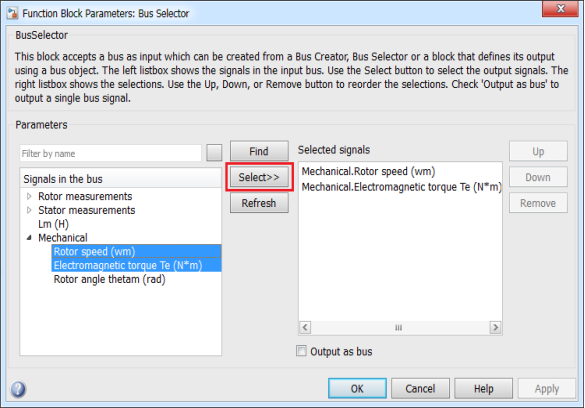
Рис. 9. Выбор характеристик в блоке Bus Selector
Для перевода скорости из рад/с в об/мин необходимо добавить блок Gain и установить в нём значение 30/pi.
Для работы модели необходим блок Powergui (раздел Fundamental Blocks библиотеки SimPowerSystems), параметры которого приведены на рис. 10.
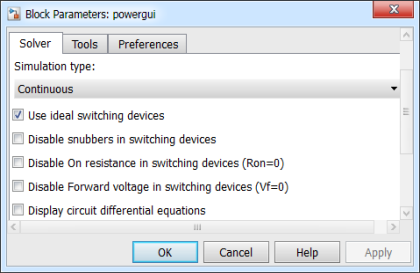
Рис. 10. Параметры блока Powergui
Результаты моделирования электропривода на базе трехфазного асинхронного двигателя с ШИМ даны на рис. 11.
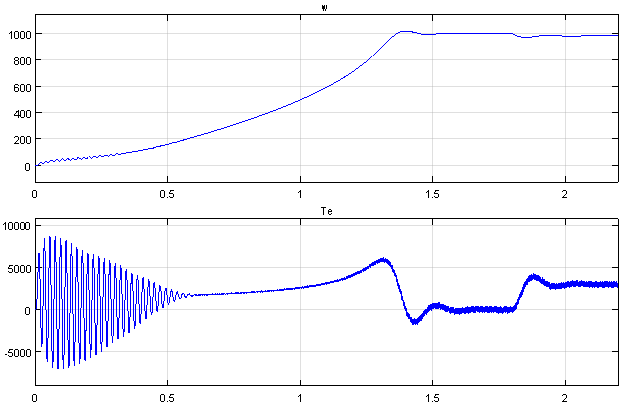
Рис. 11. Графики скорости (w) и электромагнитного момента (Te) с набросом нагрузки на двигатель при t = 1,8 с
Примечания:
- Во избежание ошибок при запуске расчета модели необходимо открыть меню Simulation, выбрать ModelConfigurationParameters. В открывшемся окне в меню Diagnostics перейти к пункту Connectivity и установить значение Muxblocksusedtocreatebussignals: error, как показано на рис. 12.
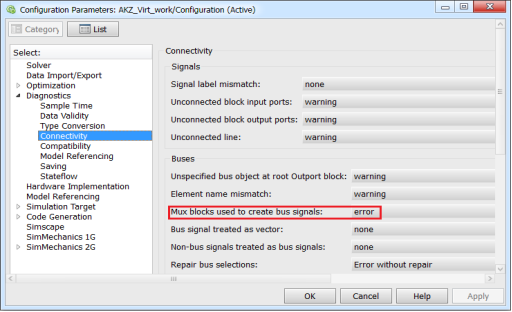
Рис. 12. Окно параметров модели
- Паспортные данные двигателя приняты из работы [6].
Номинальные данные:
Номинальный режим работыS1;
Номинальная мощность![]()
Номинальное фазное напряжение![]()
Номинальный фазный ток![]()
Номинальная частота![]()
Номинальная синхронная скорость![]()
Номинальная скорость ротора![]()
Номинальный КПД![]()
Номинальный коэффициент мощности![]()
Число пар полюсов![]()
Параметры Т-образной схемы замещения при номинальной частоте:
Активное сопротивление обмотки статора![]()
Индуктивное сопротивление рассеяния обмотки статора![]()
Активное сопротивление обмотки ротора, приведенное к статору![]()
Индуктивное сопротивление рассеяния обмотки ротора, приведенное статору![]()
Главное индуктивное сопротивление![]()
Индуктивность рассеяния обмотки статора![]()
Индуктивность рассеяния обмотки ротора![]()
Суммарный момент инерции двигателя и механизма![]()
Литература:
- SimscapePowerSystemsExamples [Электронный ресурс] // MathWorks. – Режим доступа: www.mathworks.com/help/physmod/sps/examples.html.
- Герман-Галкин С. Г. Matlab & Simulink. Проектирование мехатронных систем на ПК. – СПб.: КОРОНА-Век, 2008. – 368 с.
- Герман-Галкин С. Г. Компьютерное моделирование полупроводниковых систем в MATLAB 6.0: Учебное пособие. – СПб.: КОРОНА принт, 2007. – 320 с.
- Черных И. В. Моделирование электротехнических устройств в MATLAB, SimPowerSystems и Simulink. – М.: ДМК Пресс; СПб.: Питер, 2008. – 288 с.
- Терёхин В. Б. Моделирование систем электропривода в Simulink (Matlab 7.0.1): учебное пособие / В. Б. Терёхин; Национальный исследовательский Томский политехнический университет. – Томск: Изд-во Томского политехнического университета, 2010. – 292 с.
- Шрейнер Р. Т. Электромеханические и тепловые режимы асинхронных двигателей в системах частотного управления: учеб. пособие / Р. Т. Шрейнер, А. В. Костылев, В. К. Кривовяз, С. И. Шилин. Под ред. проф. д. т. н. Р. Т. Шрейнера. – Екатеринбург: ГОУ ВПО «Рос. гос. проф.-пед. ун-т», 2008. – 361 с.

