В данной статье рассматривается проблема введения новейших технологий в сельскохозяйственную отрасль.
Ключевые слова: робот, сельское хозяйство, посадка растений.
This article considers the problem of the introduction of new technologies in the agricultural sector.
Keywords: robot, agriculture, planting.
Сельское хозяйство — одно из наиболее распространенных хозяйств в мире. Это то, что обеспечивает нас продуктами, одеждой. Однако без внедрения современных технологий оно не имеет достойного будущего. Наиболее рациональным нововведением является внедрение роботов в сельскохозяйственные работы.
Большая часть продукции сельского хозяйства производится из растений, многие из которых необходимо посадить с помощью семян. Для этого необходимо либо большое количество рабочих для ускорения рабочего процесса. Задача сводиться к выполнению данной работы с минимальными затратами.
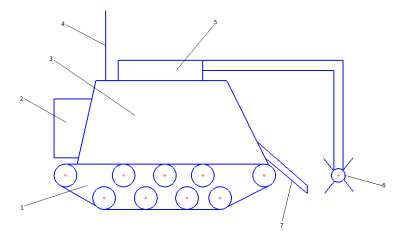
Рис.1. Общая схема робота
Разработанная модель робота для посадки семян состоит из платформы на гусеничном ходу, приводимое в движение с помощью электродвигателя 2. Корпус 3 представляет из себя бункер для загрузки семян или корнеплодов. Все системы робота управляются дистанционно при помощи пульта управления и принимающей антенны 4. Башня 5 одновременно является и загрузочным отверстием, и башней для управления системой вскапывания 6, необходимая для создания углублений нужной формы, глубины и ширины. В созданную лунку через систему подачи 7 доставляются семена (Рис.1).
Традиционно используемые методы обладают предельной жесткостью, позволяющей избежать указанных отклонений. В случае использования роботов такой путь компенсации возмущений неприемлем. Роботы должны обладать мобильностью и способностью оперировать в широкой рабочей зоне при наличии сравнительно небольшого числа степеней подвижности. Эти требования несовместимы с высокой жесткостью конструкции.
Как альтернатива высокой жесткости конструкции в литературе предлагаются различные методы активного управления роботом, позволяющие уменьшать динамические отклонения. В настоящей работе предложен простой и эффективный способ организации роботизированного процесса без привлечения активного управления. Содержащиеся в статье выводы являются результатом подробного анализа динамического процесса.
Модель инструмента, взаимодействующего с поверхностью, представлена на рис. 2.
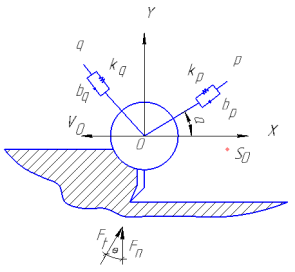
Рис. 2. Модель инструмента
Основной составляющей математической модели является схват робота. Ось х направлена по касательной к ожидаемой поверхности детали, а ось у — по нормали к этой поверхности. Начало координат 0 характеризует ожидаемое положение центра схвата. Точка О перемешается вместе с системой координат Оху с заданной скоростью V0. Отклонения центра схвата от начала координат описываются функциями x(t), y(t).
Инструмент для обработки земли удерживается охватом манипулятора. Для многомерных механических систем обычно можно выделить два главных направления, в которых проявляется жесткость системы, причем проявления по этим направлениям независимо друг от друга и могут быть представлены наличием двух пружин. Подобный факт имеет место и для демпфрования. Для простоты далее предполагается, что главные направления жесткости и демпфирования совпадают друг с другом. Таким образом, предполагается, что модель содержит две пружины с коэффициентами жесткости kp и kq и два демпфера с коэффициентами демпфирования bp, bq, расположенные вдоль ортогональных осей p и q. Угол α, изображенный на рис. 2, определяет поворот системы координат Opq относительно системы координат Оxy и является углом ориентации структуры модели. Поскольку параметры kp, kq и α характеризуют, главным образом, устройство охвата, то, исследуй влияние этих параметров на качество процесса шлифования, можно проводить их оптимизацию.
Для анализа динамики охвата, удерживающего инструмент, рассматриваются его уравнения движения:
![]() (1)
(1)
![]()
где m — масса инструмента, fp, fq- силы, действующие на инструмент вдоль осей р, q.
Для процесса работы характерна сильная зависимость между движениями по касательному и нормальному направлениям. Для того, чтобы проанализировать эту зависимость, рассматривается сила реакции F, которая действует на инструмент, как показано на рис 2. Сила F может быть разложена на компоненты Ft, Fn, причем нормальная составляющая Fn образует с F постоянный уголƟ. Отсюда следует, что силы Fn, Ft связаны соотношением
Ft =µFn, µ=tanƟ
Разложение сипы F по главным осям р и q выражается равенствами
fp = Fsin(α + Ɵ), (3)
Если (3) подставить в (1), из полученных равенств исключить силу F и затем применить преобразование Лапласа, то с учетом выражения для координат х, у через координаты р, q окончательно будут получены соотношения
G(s) = cotƟ (4)
(4)
Здесь Bn, Kn, Bt,Kt — функции параметров α, kp, bp,kq, bq.Они характеризуют демпфирование и жесткость охвата в направлениях нормали и касательной. Уравнения С4) описывают зависимость поведения модели в направлении у от ее поведения в направлении х. Известно, что возникновение вибрации в направлении касательной вероятнее, чем в направлении нормали, так как жесткость в этом направлении меньше. При этом вибрация в касательном направлении является причиной возникновения пульсирующей нормальной силы Fn. Поэтому желательно по возможности уменьшить влияние отклонений по оси х на поведение модели в направлении оси у.
В том случае, когда возмущенное движение колеса имеет высокую частоту, член ms2 в передаточной функции G(s) является доминирующим и функция G(s) становится равной cotθ. При возмущении низкой частоты функция G(s) определяется равенством
![]() (5)
(5)
Поскольку k характеризует связь между поведением системы в нормальном и касательном направлениях, то при вибрации низкой частоты большое значение приобретают величины параметров α, kq, kp. Действующие при обработки почвы силы характеризуются двумя группами эмпирическими соотношениями,
Zw=λwFn
Fn=CZ, C=1/λw(7)
Которые характеризуют объем почвы, λw —«коэффициент удаления металла». Поскольку в данном случае рассматривается только одна деталь, индекс w у характеристики Zw можно опустить. При этом возникает второе уравнение в (7) и жесткость конструкции традиционных робота. Роботы обладают податливостью, поэтому величина Z определяется по формуле
![]() (8)
(8)
Если колеса может двигаться в направлении отрицательных значений y, то силы Ft, Fn определяются по формулам
![]() (9)
(9)
![]()
При движении нормальные силы содержат составляющие компоненты высокой частоты, которые не оказывают существенного влияния на динамические процессы, возникающие при обработки почвы.
С другой стороны, из анализа уравнений движения следует, что отклонение по оси у при достижении системой устойчивого состояния обратно пропорционально величине Кn. Поэтому предпочтительнее является соотношение коэффициентов жесткости kp«kq. Моделирование доказало, что если положитьθ=30° и менять α от -90°до 90°, то наибольшие отклонения центра инструмента наблюдаются при α= ± 45°, а наименьшие — при α = 0° и α=±90°. Наихудшее поведение системы наблюдается при α=45°, а при α=0° процесс обработки почвы протекает практически без вибрации системы передвижения.
Преимуществами данного робота являются:
Быстродействие;
Способность выполнения большого объема работы;
Высокая проходимость;
Способность дозировать расходные материалы, что положительно повлияет на затраты;
Почти полная независимость от человека, задействованного в данной операции, кроме управления роботом.
Данный робот значительно облегчит и ускорит работы по засеевыванию полей огромной площади, позволив избежать лишних затрат на рабочую силу и расходные материалы.
Выполнение операций требует от рабочего значительного напряжения. Даже при современном уровне производства такой труд низкопродуктивен и небезопасен. Заменить человека мог бы робот при условии решения некоторых технических проблем. Одна из них связана с воздействием на инструмент, который закрепляется в охвате робота, вибрационных сил, возникающих в процессе работы. Эти силы способны вызывать значительные отклонения инструмента от заданного положения» Наличие неравномерных нагрузок может также привести к разрушению механической конструкции робота.
Литература:
- http://timerobots.ru/robots/388-robot-sazhajuwij-derevja.html
- С. В. Емельянов, Е. Б. Дудин, А. А. Петров. Робототехника № 25; ВИНИТИ, Москва, 1988.

