Для решения подобных задач был разработан транспортный робот (рис. 1), который состоит из трех модулей: ходовой платформы, среднего отсека и турели.
В ходовой платформе используется сравнительно новый принцип синхронного привода и управления всеми колесами. Когда роботу нужно сделать поворот, все колеса поворачиваются в унисон, так что сама платформа даже не вращается. Благодаря этому робот очень быстро поворачивается на месте.
Для передачи приводных усилий в роботе применяется система концентрических валов. Благодаря симметрии в приводе отсутствуют недостатки цепной или ременной передачи. Погрешность позиционирования меньше 0,5 % почти для любой поверхности пола.
Поскольку его платформа неподвижна при поворотах, то для навигации робота используется вращающаяся турель, монтируемая с помощью быстросъемного фланца. Фланец приподнят над стойкой, позволяя устанавливать средний модуль между турелью и платформой робота. Средний отсек не вращается относительно робота и может использоваться либо для дополнительных бортовых систем, либо как грузовое отделение.
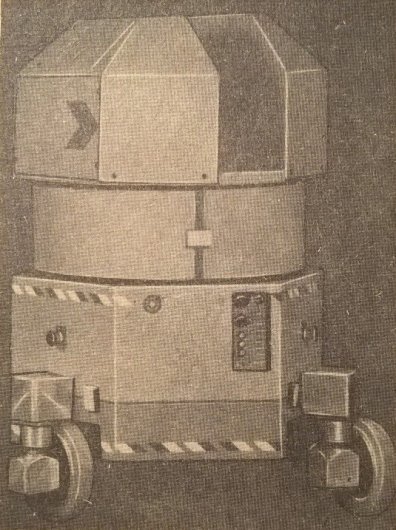
Рис. 1. Транспортный робот
На прикрепленной к турели арке смонтирована инфракрасная навигационная и коммуникационная аппаратура. С помощью этой аппаратуры транспортный робот запоминает при обучении фактическую траекторию движения, по которой он затем перемещается. Такой способ управлениядвижением имеет ряд существенных преимуществ по сравнению с перемещением вдоль высокочастотного кабеля, проложенного под полом, главное отличие заключается в возможности в любое время быстрого ввода новой траектории и возможности отклонения от программной траектории, чтобы обойти препятствия или другие движущиеся объекты.
При обычном движении робот следит за фиксированными настенными маяками и осуществляет непрерывную связь с центральной ЭВМ, которая управляет всеми транспортными средствами. Когда транспортный робот подходит к стационарному оборудованию, маяк используется для обмена припарковочными сигналами, чтобы избежать столкновения (например, с рукой стационарного робота и т. п.), а также для точного позиционирования транспортного робота в месте парковки. Обмен информацией позволяет также уточнить положение перегружаемых объектов.
Когда транспортный робот неподвижен, вращающаяся турель может быть использована как дополнительная степень подвижности для смонтированных на ней систем.
Турель и средний модуль разработаны для транспортировки различных инструментов и деталей, а также, для выполнения производственных заданий.
Свободно перемещающийся автономный транспортный робот обладает чрезвычайно высокой маневренностью, позволяющей использовать их как элементы системы перевозки грузов от одного рабочего места к другому. Транспортный робот повышает эффективность производства не только за счет перемещения предметов по произвольным маршрутам, но также благодаря возможности создать систему автономной оптимизации трассы в случае обнаружения неисправности оборудования рабочего места или самого транспортного робота.
Литература:
- Поезжаева Е.В//Теория механизмов и механика систем машин. Промышленные роботы: учеб. пособие: в 3 ч. / Е. В. Поезжаева. — Пермь: Изд-во Перм. Гос. техн. ун-та, 2009.-Ч.2–185.
- Поезжаева Е.В//Теория механизмов и механика систем машин. Промышленные роботы: учеб. пособие: в 3 ч. / Е. В. Поезжаева. — Пермь: Изд-во Перм. Гос. техн. ун-та, 2009.-Ч.3–164.
- Поезжаева Е. В., Юртаев Р. И., Чудинов В. А., Идентификация геометрических параметров роботов //Молодой ученый № 15 (93) 2015

