В статье говорится о системе управления перемещением робота в пространстве для диагностики производственных помещений, используя математическую модель.
Ключевые слова: робот, система, диагностика.
Многие шагающие роботы, скрывают в себе огромный потенциал, позволяющий использовать их для диагностики производственных помещениях. Автоматическим устройством, обеспечивающим передвижение, является шагающий робот. Большинство из них имеет адаптивное программное управление, в котором программа задается либо в форме готовых приводов для траектории каждой из координат манипуляционной системы, либо в виде траекторий в координатах рабочей зоны, которые затем преобразуются в реальном режиме времени в координаты степеней подвижности манипуляционной системы робота (Рис.1).

Рис. 1. Шагающий робот
Однако в реальных условиях при перемещении аппарата по поверхности в результате её уплотнения под действием веса аппарата происходит изменение положения центра тяжести и пространственной ориентации корпуса шагающего аппарата.
Система управления движением шагающего аппарата использует информацию от силовых сенсоров, установленных в каждой ступне аппарата. Свойства опорной поверхности описываются моделью ![]() (1),где δ — коэффициент деформации; F — сила, действующая на поверхность со стороны ступни; kи n — константы, определяемые экспериментально. Принимаем допущения об окружающей среде и шагающем аппарате: 1. Проседание δ не превышает длины ноги (δ< l). 2. Сила давления ступни F и коэффициент деформации δ связаны соотношением (1). 3. Упругие деформации элементов конструкции полагаются пренебрежимо малыми.
(1),где δ — коэффициент деформации; F — сила, действующая на поверхность со стороны ступни; kи n — константы, определяемые экспериментально. Принимаем допущения об окружающей среде и шагающем аппарате: 1. Проседание δ не превышает длины ноги (δ< l). 2. Сила давления ступни F и коэффициент деформации δ связаны соотношением (1). 3. Упругие деформации элементов конструкции полагаются пренебрежимо малыми.
Упрощенное изображение шагающего аппарата и связанной с ним координатной системы показано (Рис.2) штриховой линией показано малое смещение корпуса в направлении оси y. Начало системы координат совпадает с центром тяжести корпуса аппарата.
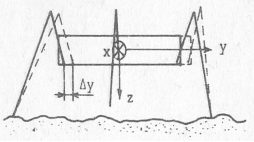
Рис. 2. Координаты шагающего робота
Ниже рассматривается изменение опорных сил в двух фазах движения аппарата: в фазе смены опорных конечностей и в фазе перемещения корпуса.Алгоритм управления включает в себя две части: 1) формирует движение ступни; 2) осуществляет компенсацию в фазе перемещения корпуса аппарата. В фазе смены опорных конечностей управление силой осуществляется её регистрированием на ступне. В фазе перемещения корпуса аппарата опорная сила конечности изменяется. Наклон корпуса аппарата уменьшает область статической устойчивости аппарата и приводит к нежелательному перераспределению опорных сил. Коррекция пространственной ориентации может производиться по сигналам специальных сенсоров, регистрирующих углы наклонов аппарата в разных направлениях.
Малый угол наклона аппарата можно определить (рис.3) и без использования сенсора абсолютной пространственной ориентации. Оси x2i, y2i и z2i представляют координатные системы, начала которых совпадают с точками крепления конечности к корпусу. Точка (![]() 2i,
2i, ![]() 2i,
2i, ![]() 2i) представляет координаты концов конечностей в собственных координатных системах. Если правая опорная нога имеет номер 2i, а левая — 2i-1, то из баланса сил и моментов можно получить
2i) представляет координаты концов конечностей в собственных координатных системах. Если правая опорная нога имеет номер 2i, а левая — 2i-1, то из баланса сил и моментов можно получить
![]()
![]()
![]()
Если угол Θмал, то его можно определить из выражения
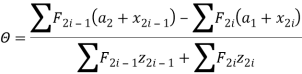 .
.
Накапливаемую ошибку пространственной ориентации аппарата можно скорректировать без использования специальных сенсоров только на основании силовой обратной связи с восстановлением угла наклона [1].
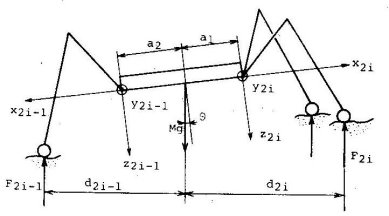
Рис. 3. Коррекция пространственной ориентации
Робот с дистанционным управлением предназначен для диагностики производственных помещений. Он может быть использован для проведения работ в подвальном помещении. Робот управляется двумя операторами, один следит за передвижением, другой — за электрическими проводами. Он преодолевает любые препятствия и выполняет различную физическую работу [2].
Литература:
- Поезжаева Е.В. Промышленные роботы: учеб. пособие. в 3 ч. — М.: Изд-во УМО АМ МВТУ им. Баумана; изд-во ПГТУ, 2009.
- Поезжаева Е.В., Поликарпова К.Н., Роботизация для обеспечения комфорта в промышленных и бытовых помещениях // Молодой ученый . — 2015 . — № 14 (94) . — С. 179-181.

