Подсистема управления магнитожидкостным клапаном волнового насоса представляет собой микроконтроллерную систему с одной основной обратной связью. Подсистема включает в себя как цифровые (дискретные) элементы, так и аналоговые, ввиду чего в систему необходимо включить цифро-аналоговые и аналогово-цифровые преобразователи. Для параметров ![]() ,
, ![]() ,
, ![]() ,
, ![]() ,
, ![]() и
и ![]() заданы следующие интервалы значений:
заданы следующие интервалы значений:
![]() с шагом 0,1;
с шагом 0,1;
![]() с шагом 0,01;
с шагом 0,01;
![]() с шагом 0,1;
с шагом 0,1;
![]() с шагом 0,01;
с шагом 0,01;
![]() с шагом 0,001;
с шагом 0,001;
![]() с шагом 0,001.
с шагом 0,001.
Варьирование значений параметров осуществляется следующим образом: один из параметров изменяется от минимального значения до максимального с заданным шагом, а другие параметры считаются неизменными и их значение принимается равным минимально заданному.
Модель подсистемы управления магнитожидкостным клапаном волнового насоса в Simulink представлена на рис. 1.
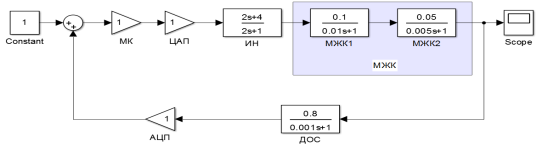
Рис. 1. Модель подсистемы управления магнитожидкостным клапаном волнового насоса в Simulink
Первым исследуемым параметром является ![]() .
.
Как видно из графиков ЛАЧХ подсистемы управления магнитожидкостным клапаном волнового насоса при увеличении значения параметра ![]() характеристики системы улучшаются, однако, несмотря на то, что в заданном интервале значений система является устойчивой, график ЛАЧХ системы лежит в отрицательной части системы координат, что свидетельствует о неработоспособности системы. Ввиду выше сказанного в систему следует включить корректирующее звено в виде усилителя, с коэффициентом усиления
характеристики системы улучшаются, однако, несмотря на то, что в заданном интервале значений система является устойчивой, график ЛАЧХ системы лежит в отрицательной части системы координат, что свидетельствует о неработоспособности системы. Ввиду выше сказанного в систему следует включить корректирующее звено в виде усилителя, с коэффициентом усиления ![]() .
.
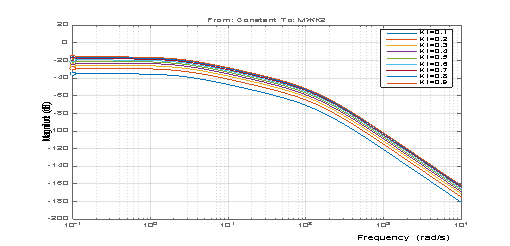
Рис. 2. Графики логарифмической амплитудо-частотной характеристики подсистемы управления магнитожидкостным клапаном волнового насоса при различных значениях параметра ![]()
Вторым исследуемым параметром является ![]() .
.
Из графика ЛАЧХ (рис. 3) видно, что при увеличении значения ![]() увеличивается наклон ЛАЧХ в высокочастотной области, что приводит к увеличению астатизма. Увеличение астатизма негативно сказывается на динамических характеристиках системы, что видно из графиков переходного процесса системы (рис.4).
увеличивается наклон ЛАЧХ в высокочастотной области, что приводит к увеличению астатизма. Увеличение астатизма негативно сказывается на динамических характеристиках системы, что видно из графиков переходного процесса системы (рис.4).
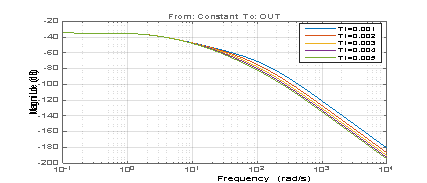
Рис. 3. Графики логарифмической амплитудо-частотной характеристики подсистемы управления магнитожидкостным клапаном волнового насоса при различных значениях параметра ![]()
При возрастании значения ![]() увеличивается время нарастания регулируемой величины и время регулирования системы. Форма графика переходного процесса приобретает отрицательную кривизну, что свидетельствует о запаздывании реакции системы на изменение регулируемой величины.
увеличивается время нарастания регулируемой величины и время регулирования системы. Форма графика переходного процесса приобретает отрицательную кривизну, что свидетельствует о запаздывании реакции системы на изменение регулируемой величины.
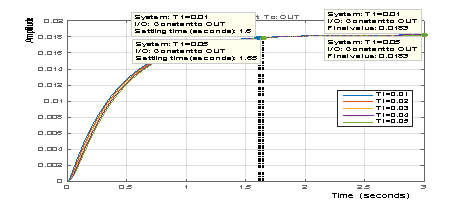
Рис. 4. Графики переходного процесса подсистемы управления магнито-жидкостным клапаном волнового насоса при различных значениях параметра ![]()
Из графиков видно, что установившееся значение регулируемой величины не изменяется, однако увеличивается время регулирования
Аналогично исследуем параметров ![]() ,
, ![]() ,
, ![]() и
и ![]() .
.
Таблица 1
Влияние значений параметров узлов подсистемы управления магнитожидкостным клапаном волнового насоса на статические и динамические характеристики
|
Параметр |
Влияние увеличения параметра на статические характеристики подсистемы |
Влияние увеличения параметра на динамические характеристики подсистемы |
|
|
1. Увеличение установившегося значения регулируемой величины. 2. Увеличение времени регулирования |
1. Увеличение запаса устойчивости по амплитуде |
|
|
1. Увеличение времени регулирования |
1. Увеличение астатизма |
|
|
1. Увеличение установившегося значения регулируемой величины. 2. Увеличение времени регулирования |
1. Увеличение запаса устойчивости по амплитуде |
|
|
1. Увеличение времени регулирования |
1. Увеличение астатизма |
|
|
1. Увеличение установившегося значения регулируемой величины. 2. Увеличение времени регулирования |
Не влияет |
|
|
Не существенное увеличение времени регулирования |
Не влияет |
Наибольшее влияние на характеристики системы оказывает параметр ![]() . Наименьшее — параметр
. Наименьшее — параметр ![]() . Исходя из заданных интервалов значений параметров и их влияния на характеристики системы, можно построить область всех состояний ЛАЧХ и переходного процесса.
. Исходя из заданных интервалов значений параметров и их влияния на характеристики системы, можно построить область всех состояний ЛАЧХ и переходного процесса.
Моделирование мембраны, проводим аналогично моделированию клапану используя параметры: ![]() ,
, ![]() ,
, ![]() ,
, ![]() и
и ![]() заданы следующие интервалы значений:
заданы следующие интервалы значений:
![]() с шагом 0,01;
с шагом 0,01;
![]() с шагом 0,1;
с шагом 0,1;
![]() с шагом 0,001;
с шагом 0,001;
![]() с шагом 0,001;
с шагом 0,001;
![]() с шагом 0,001.
с шагом 0,001.
Результаты моделирования подсистемы управления магнитожидкостным клапаном волнового насоса сведены в таблицу 2.
Таблица 2
Влияние значений параметров узлов подсистемы управления магнитожидкостным клапаном волнового насоса на статические и динамические характеристики
|
Параметр |
Влияние увеличения параметра на статические характеристики подсистемы |
Влияние увеличения параметра на динамические характеристики подсистемы |
|
|
1. Увеличение установившегося значения регулируемой величины. 2. Увеличение времени регулирования |
1. Увеличение запаса устойчивости по амплитуде и по фазе |
|
|
1. Увеличение времени регулирования 2. Уменьшение установившегося значения регулируемой величины |
1. Уменьшение запасов устойчивости по фазе и по амплитуде |
|
|
1. Увеличение времени регулирования 2. Уменьшение установившегося значения регулируемой величины |
1. Уменьшение запасов устойчивости по фазе и по амплитуде |
|
|
1. Увеличение установившегося значения регулируемой величины. 2. Увеличение времени регулирования |
Не влияет |
|
|
1. Увеличение времени регулирования 2. Уменьшение установившегося значения регулируемой величины |
Не влияет |
Наибольшее влияние на характеристики системы оказывает параметр ![]() . Наименьшее — параметр
. Наименьшее — параметр ![]() . Исходя из заданных интервалов значений параметров и их влияния на характеристики системы, можно построить область всех состояний ЛАЧХ и переходного процесса.
. Исходя из заданных интервалов значений параметров и их влияния на характеристики системы, можно построить область всех состояний ЛАЧХ и переходного процесса.
Литература:
- Орлов Д. В. Магнитные жидкости в машиностроении / Д. В. Орлов и др.. М.: Машиностроение, 1993.- 272 с.
- Власов. В. В. Синтез интегральной передаточной функции для объектов управления с распределёнными параметрами/ В. В. Власов //. Школа академика Власова. Вып. 1. М.: Буркин, 1998. с. 65–127.
- Рапопорт Э. Я. Структурное моделирование объектов и систем управления с распределенными параметрами / Э. Я. Рапопорт. М.: Высшая школа, 2003.- 299 с.

