In today's world, have the question of the restriction or complete absence of hard physical labor in the construction industry with the help of robots. In this regard, developed a robot that allows you to carry out repair and finishing of rooms and buildings.
Keywords: Robot, movable platform, crane, repair work.
Люди издавна пытались создавать машины, которые бы смогли бы выполнять за них различную работу. Многие знают, что большинство производственных линий вместо людей используют роботов. Но производственные линии — это не единственная область, где могут применяться автоматизированные машины. Представляем вашему вниманию робота-штукатура, который может заменить человека в отделочных работах (рис.1).
Все мы привыкли что стены штукатурят большое количество человек. Но время не стоит на месте и теперь можно заметить, что ремонтные работы могут выполнить роботы. Робот действует строго по программе и в течение одного рабочего дня способен выполнять в 10–20 раз больше работы, нежели человек. За работой механизма следит человек, внося коррективы в процессе нанесения штукатурки, тем самым улучшая качество выполненной работы.

Рис. 1. Робот для отделочных работ

Рис. 2. Работа робота.
В отличие от человека робот-штукатур имеет ряд преимуществ. Робот делает идеально ровные стены, без неровностей и бугорков. К тому же готовый результат будет гораздо быстрее, чем это делает обычный человек. Так что первое преимущество робота-штукатура — высокая скорость работы и качественный результат.Также робот может работать с любым качеством приготовленной смеси. На ровной поверхности робот может разогнать до 90 метров квадратных нанесенной штукатурки за 1 час работы. А за 1 рабочий 8-ми часовой день способен обработать до 750 м2, в то время как человек способен обработать не более 25 м2 за то же время. Робот-штукатур может использоваться на востребованной высоте (рис.2).
Устройство напоминает работу принтера. Робот берет предварительно приготовленный раствор из резервуара, который располагается отдельно от механизма. С помощью шлангов раствор подается на специальное сопло, разбрызгивающее раствор под давлением на стену. Механизм может перемещаться в любых направлениях. Робот выбирает уровень высоты, после чего при горизонтальном перемещении происходит набрасывание раствора. Головка с разбрызгивателем может проходить несколько раз слева направо и наоборот. После того как раствор был нанесен на стену он выравнивается установленной строительной теркой.
Роботы -штукатуры отличаются высокой производительностью и отличным качеством выполненной работы. А самое главное — такие механизмы полностью заменяют сложную работу человека по нанесению раствора. Такие роботы повышают производительность и качество работы, полностью оправдывающее свое назначение и стоимость.
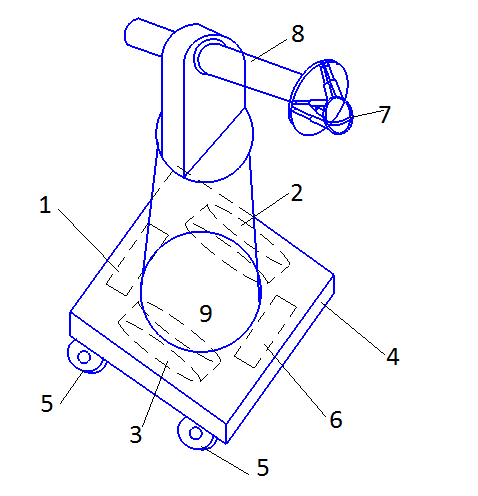
Рис. 3. Подвижная платформа робота
Робот имеет подвижную платформу
Платформа содержат пассивное прямоугольное основание 4 (см. рис 3). Основание устанавливается над опорной поверхностью с помощью четырех опорных роликов 5. На нижней плоскости основания устанавливаются четыре линейных индукционных электрических двигателя 1,2,3,6, которые могут перемещать платформу в различных направлениях по электропроводной опорной поверхности. Линейные индукционные электрические двигатели содержат множество обмоток, питаемых многофазным переменным электрическим током, образующим «бегущее» магнитное поле. При взаимодействии магнитного поля с электропроводной или магнитной опорной поверхностью, образуются силы, перемещающие платформу. На платформу может устанавливаться колонна 9, внутри которой располагается известные механизмы, обеспечивающие осевые перемещения вала 8, на конце которого устанавливается схват 7.
Также робот имеет вертикальный многошарнирный манипулятор, размещенный на поворотном основании. Электропривод подводится от шагового электрического двигателя. Число степеней подвижности манипулятора четыре, а в модификации с вращающими рабочим звеном и схватом число степеней свободы увеличивается. Относительной особенностью рассматриваемого робота является модульная конструкция степеней подвижности (звеньев) содержащих все элементы кинематической пары и ее привода, а также части несущих конструкций двух соседних звеньев. Выпускается несколько типоразмеров модулей, что позволяет получить большое разнообразие промышленных роботов которые применяются для выполнения различных операций, которые востребованы для ремонтных работ.
Робот-штукатур, отличительной особенностью которого является разработанная подвижная платформа c многофункциональным манипулятором значительно облегчит труд, а также выполнит работу намного быстрее и качественнее нежели человек. Робот работает по четко заданной программе которую можно изменить от различных условий работы. Данные роботы смогут повысить производительность и качество работы, полностью оправдывающее свое назначение и стоимость.
Литература:
- Поезжаева Е. В. Промышленные роботы: учеб.пособие в 3 ч-М.: Изд-во УМО АМ МВТУ им. Баумана: изд-во ПГТУ, 2009.
- http://www.metaprom.ru/board_foto/1402301282foto2_big.jpg
- http://nashaotdelka.ru/wp-content/uploads/robot-nebolshih-razmerov.jpg


{kind=link}