




1 Весы аэродинамические
Весы аэродинамические — установка или система для измерения составляющих аэродинамических сил и моментов, действующих на модель в аэродинамической трубе. Каждая составляющая воспринимается отдельным измерительным каналом — компонентом. Аэродинамические весы могут иметь от одного до шести компонентов. По принципу действия аэродинамические весы подразделяются на механические и электрические (тензометрические).
Механические аэродинамические весы состоят из жёсткой рамы (расположена за границами потока аэродинамической трубы) и связанных между собой рычажных систем, удерживающих её в положении равновесия; выходные звенья рычажных механизмов соединены с измерительными приборами. Модель устанавливается на раме с помощью стоек или растяжек; имеется также механизм дистанционного изменения углов установки модели. В процессе эксперимента усилие, развиваемое выходным звеном какой-либо. рычажной системы, пропорционально одноимённой составляющей аэродинамической силы или момента, действующей на модель. Измерение усилия осуществляется при помощи автоматических коромысловых весовых элементов с подвижными грузами либо электрическими динамометрами. В том и другом случаях значение усилия преобразуется в электрический сигнал с целью его регистрации и дальнейшей обработки на электронно-вычислительной машине. Полный диапазон измерения механических весов разбивается на ряд поддиапазонов. Погрешность весов, приведённая к 0,05 %.
Электрические аэродинамические весы состоят из упругого тела, чувствительных элементов и преобразователей деформации чувствительных элементов (обычно тензорезисторных) в электрический сигнал. Чувствительные элементы выполнены вместе с телом и ориентированы так, чтобы деформация элемента, вызванная соответствующей составляющей аэродинамической силы или момента, была максимальной. Различают два типа электрических аэродинамических весов — с вынесенными чувствительными элементами и с элементами, расположенными внутри модели. Для измерения всего диапазона возможных значений составляющих аэродинамической силы и момента, реализуемых в данной аэродинамической трубе, обычно требуется ряд аэродинамических весов. Погрешность электрических аэродинамических весов, приведённая к диапазону, составляет 0,3–0,5 %.
2 Аэродинамическая труба
2.1 Основные параметры трубы
Аэродинамическая труба Т-3 СГАУ (Рисунок 1) является трубой малых скоростей, замкнутого типа с открытой рабочей частью. Коэффициент поджатия сопла равен 6 (отношение площади поперечного сечения форкамеры к площади рабочей части). Рабочая часть трубы открытая, длиной 1 м. Поперечное сечение сопла прямоугольное 0.4х0.6м, со скошенными углами. Для перемещения исследуемой модели рабочая часть оборудована a — b механизм. Диапазон перемещения модели по углу α [-10°;+20°], по углу β [-20°;+45°]. Поток в рабочей части трубы создаётся центробежным вентилятором, ротор которого представляет собой крыльчатку. Скорость потока задается до 50 м/с за счет изменения числа оборотов двигателя вентиляторной установки. Минимальная скорость, которая может поддерживаться автоматизированной системой 2 м/с.
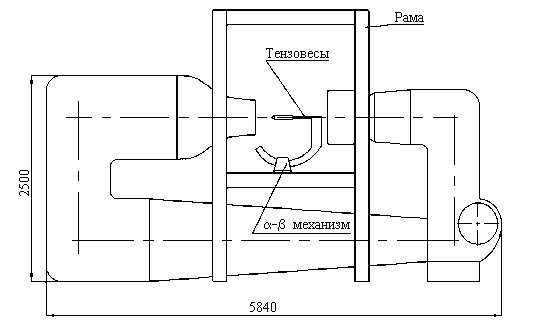
Рис. 1. Состав аэродинамической трубы
2.2 Воздушный тракт
Воздушный тракт трубы (рисунок 2) состоит из сопла, открытой рабочей части, входного диффузора, обратного канала с поворотными коленами, форкамеры с хонейкомбом и сеткой.
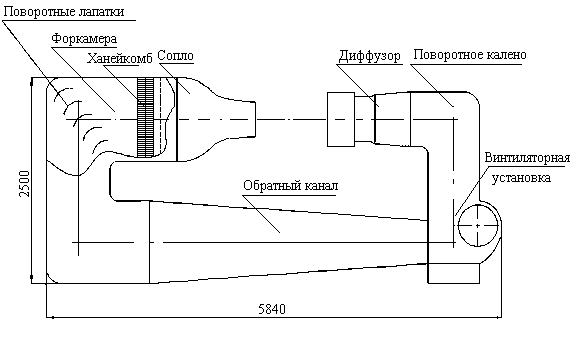
Рис. 2. Воздушный тракт трубы
Поток в рабочей части трубы создаётся центробежным вентилятором, ротор которого представляет собой крыльчатку. В контуре имеются 4 поворотные колена. За рабочей частью расположен входной двухконтурный диффузор, который представляет собой расширяющийся канал, обеспечивающий торможение потока с наименьшими потерями и, тем самым, эффективное превращение кинетической энергии в энергию давления. В корпусе диффузора выполнены инжекторные регулируемые окна, предназначенные для снижения пульсаций потока. Сетка служит для детурбулизации воздушного потока на входе в вентилятор. Обратный канал представляет собой канал переменного сечения с поворотными коленами и вентиляторным отсеком. В первом поворотном колене располагаются профилированные направляющие лопатки, разворачивающие поток на 90° и уменьшающие завихрения потока на поворотах. Во втором — диаметральный вентилятор сварной конструкции. В третьем и четвертом поворотных коленах также имеются профилированные направляющие лопатки. За четвертым поворотным коленом в форкамере установлен металлический хонейкомб, служащий для выравнивания потока по направлению и представляющий собой сотовый блок из стальных пластин. За хонейкомбом стоит специальная детурбулизирующая сетка, которая гасит возмущения и уменьшает неравномерности распределения скорости потока по сечению форкамеры.
2.3 Привод и вентилятор
Поток в рабочей части трубы создаётся центробежным вентилятором, ротор которого представляет собой крыльчатку. Вентилятор приводится в движение электродвигателем постоянного тока мощностью 45 кВт. Для питания электродвигателя используется тиристорные преобразователь ТЕ4–100/460 дополненый системой принудительного воздушного охлаждения. Система управления питанием электродвигателя имеет обратную связь по частоте вращения. В качестве задатчика оборотов используется ЦАП установленый в управляющей ПЭВМ.
3 α-β механизм
α-β-механизм (рисунок 3) предназначен для установки модели в рабочей части аэродинамической трубы, с требуемыми углами атаки α и скольжения β. Величины углов α и β задаются программно. Основой механизма является основание и корпус с вертикальной осью вращения. Для крепления тензовесов имеется стальной кронштейн, который жестко связан с зубчатым колесом. Электрожгут связи тензовесов с измерительной системой проложен в канале, находящемся под обтекателем. Диапазон перемещений модели по углу α [-10°;+20°], по углу β [-20°;+45°]. Перемещения α-β-механизма осуществляются двумя двигателями постояного тока типа ДП-50. Для контроля скорости вращения двигатели оснащены тахогенераторами.
3.1 Средства измерения
Аэродинамические тензовесы состоят из упругого тела, чувствительных элементов (профрезерованных соответствующим образом балок) и преобразователей деформаций (мосты тензорезисторов) в электрический сигнал. Чувствительные элементы выполнены вместе с телом тензовесов как одно целое и ориентированы так, чтобы деформации элементов, вызванные соответствующей составляющей аэродинамической силы или момента, были максимальными.

Рис. 3. Аэродинамические тензовесы
Конструкция тензовесов такова, что позволяет измерять силы и моменты относительно заданной точки. Эта задача для Y, Mz и для Z, My решается при помощи двух упругих элементов установленных так, что по отношению друг к другу они выполняют роль кинематического элемента. При этом центральный стержень подвергается поперечному изгибу и воспринимает на себя большую часть силы. Наружные элементы являются звеньями упругого параллелограмма и совершают поступательное движение. Пара сил момента воспринимается наружными элементами, нагружаемыми силами противоположного знака. При этом центральный стержень играет роль упругого шарнира, относительно которого происходит поворот звена.
4 Проектирование математической модели
Для проектирования был выбран профиль GA(W)-1 [1]. Ниже приведены координаты профиля GA(W)-1 в процентах от зависимости от хорды профиля.
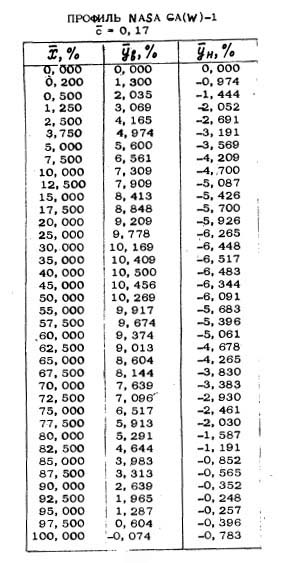
Рис. 4. Координаты профиля GA(W)-1
При выбранное хорде b = 200 мм, получаем координаты (таблица 1).
Таблица 1
Координаты профиля GA(W)-1 при b = 200 мм
|
Yb |
YH |
x |
|
0,000 |
0,000 |
0,000 |
|
2,600 |
-1,948 |
0,400 |
|
4,070 |
-2,888 |
1,000 |
|
6,138 |
-4,104 |
2,500 |
|
8,330 |
-5,382 |
5,000 |
|
9,948 |
-6,382 |
7,500 |
|
11,200 |
-7,138 |
10,000 |
|
13,122 |
-8,418 |
15,000 |
|
14,618 |
-9,4 |
20,000 |
|
15,818 |
-10,174 |
25,000 |
|
16,826 |
-10,852 |
30,000 |
|
17,696 |
-11,4 |
35,000 |
|
18,418 |
-11,852 |
40,000 |
|
19,556 |
-12,53 |
50,000 |
|
20,338 |
-12,896 |
60,000 |
|
20,818 |
-13,034 |
70,000 |
|
21,000 |
-12,966 |
80,000 |
|
20,912 |
-12,688 |
90,000 |
|
20,538 |
-12,182 |
100,000 |
|
19,834 |
-11,366 |
110,000 |
|
19,348 |
-10,792 |
115,000 |
|
18,748 |
-10,122 |
120,000 |
|
18,026 |
-9,356 |
125,000 |
|
17,208 |
-8,53 |
130,000 |
|
16,288 |
-7,66 |
135,000 |
|
15,278 |
-6,766 |
140,000 |
|
14,192 |
-5,86 |
145,000 |
|
13,034 |
-4,922 |
150,000 |
|
11,826 |
-4,06 |
155,000 |
|
10,582 |
-3,174 |
160,000 |
|
9,288 |
-2,382 |
165,000 |
|
7,966 |
-1,704 |
170,000 |
|
6,626 |
-1,13 |
175,000 |
|
5,278 |
-0,704 |
180,000 |
|
3,930 |
-0,496 |
185,000 |
|
2,574 |
-0,514 |
190,000 |
|
1,208 |
-0,792 |
195,000 |
|
-0,148 |
-1,566 |
200,000 |
Зная координаты верхней и нижней поверхности профиля построим контур профиля (рисунок 5).

Рис. 5. Контур профиля
Проектирование модели крыла с вихревыми ячейками проводилось в программном пакете SolidWorks [2]. Программный комплекс SolidWorks предназначен для автоматизации работ промышленного предприятия на этапах конструкторской и технологической подготовки производства изделий любой степени сложности и назначения. Специализированные модули программного комплекса решают задачи на этапе производства и эксплуатации.
Ниже приведены результаты проектирования модели профиля крыла в разобранном виде и в сборе.
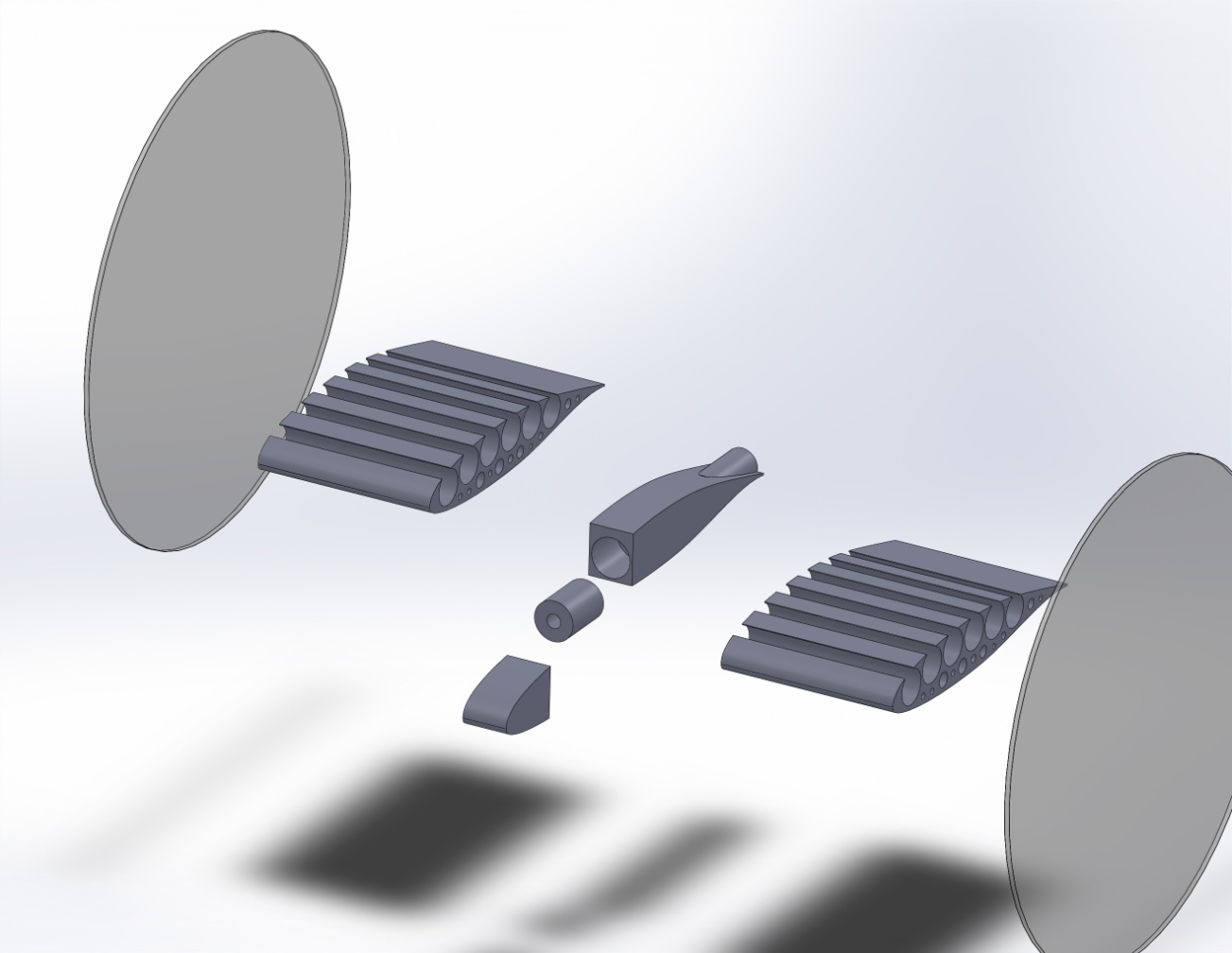
Рис. 6. Разобранная модель (вид спереди)

Рис. 7. Разобранная модель (вид сзади)
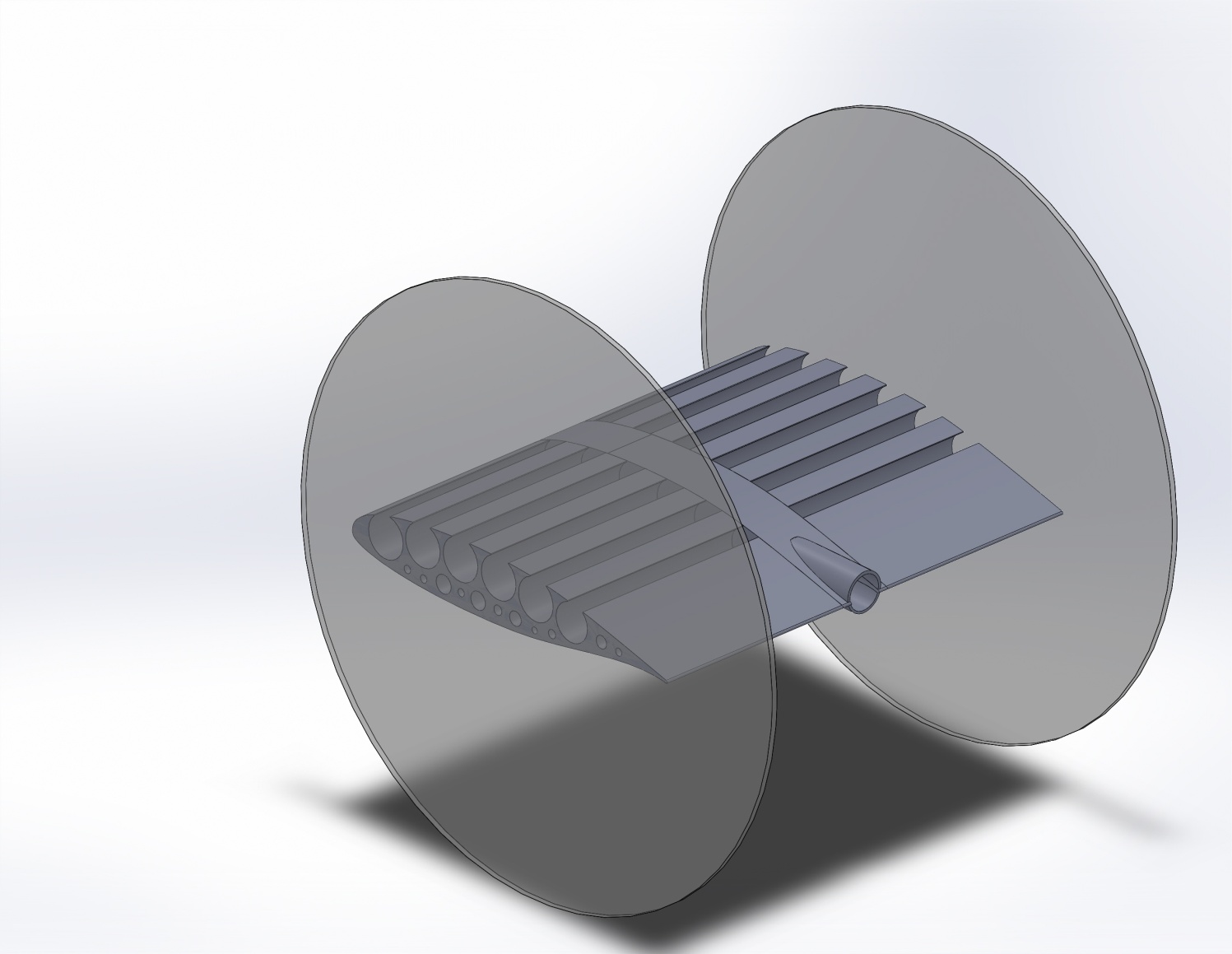
Рис. 8. Собранная модель (вид сзади)

Рис. 9. Собранная модель (вид спереди)
5 3D-печать
До недавнего времени процесс проектирования и изготовления аэродинамических моделей занимал до нескольких недель, а порой и месяцев. Процесс изготовления аэродинамических моделей во многом совпадает с более общим процессом, имеющим место в промышленности, который имеет название «прототипирование». Процесс прототипирования это создание объектов по их компьютерной 3D-модели. Сфера разработки и изготовления макетов находится в постоянном развитии, что способствует появлению новых инструментов и приёмов.
Пожалуй, самым ярким примером такого развития является технология быстрого прототипирования (Rapid Prototyping) или как её ещё называют ‒ 3D-печать. С помощью 3D-принтеров можно в кратчайшие сроки создать образцы практически любых объектов, в том числе макеты зданий, промышленных конструкций, элементов сложных механизмов и многое другое.
Достигается это за счёт так называемого процесса «наращивания» объекта с использованием специальных компонентов по заранее подготовленной компьютерной 3D-модели.
Данный метод изготовления моделей является более быстрым, точным и недорогим по сравнению с традиционным методом изготовления аэродинамических моделей.
3D-принтеры компании Z Corporation [3] отличаются от конкурентных мировых аналогов высокой производительностью, хорошей цветопередачей и наименьшей стоимостью изготовления прототипов.

Рис. 10. 3D-принтер компании Z Corporation
Ниже приводятся основные характеристики 3D-принтера Spectrum Z™510:
скорость печати: 2 слоя в минуту;
размеры рабочей части: 254×356×203мм;
толщина одного слоя: 0,0875 мм;
разрешение печати: 600×540 dpi;
количество печатающих головок: 4.
Возможные материалы: высококачественные композитные материалы, материалы для непрерывного литья, стандартным материалом является порошок на основе гипса.
Для подсчёта стоимости будущего изделия учитывается не габаритный, а только полезный объём 3D-модели. Изделия проектируются пустотелыми для экономии используемого материала и уменьшения полезного объёма модели. Примерная стоимость рассчитывается исходя из 1см3 = 40 руб., в зависимости от сложности 3D-модели и её размеров.
Литература:
Кашафутдинов С. Т., Лушин В. Н. Атлас аэродинамических характеристик крыловых профилей. — М.: Сибирский научно-исследовательский институт авиации им. С. А. Чаплыгина, 1994. — 74 с.
Прохоренко В. П. SolidWorks. Практическое руководство. — М.: Бином, 2004. — 289 с.
3. Rev J. Spectrum Z™510 3D Printer. Hardware manual. 08 2007, from http://isites.harvard.edu/fs/docs/icb.topic907832.files/ZCorp-Z510-UserManual.pdf