Человек во всём пробует применение машины в как в работе, для выполнения тяжёлых работ и вычислений, обеспечения безопасности и быстрой связи или передачи информации, так и в своей повседневной жизни: уборка, готовка, умные розетки и т. д. Самый простой пример такового — компьютеры и телефоны, автомобили, автоматизированные станки и механизмы и т. д. Но человек и на этом не остановился — на сегодняшний день компьютеры помогают нам решить проблемы со здоровьем и инвалидностью.
Самыми яркими на сегодняшний день примерами слияния человека с машиной являются применение современных «умных» фитнесс-браслетов и часов и очков виртуальной реальности. Данные предметы ознаменовали переход к новому этапу взаимодействия широкой аудитории с техникой. Можно сказать, что гаджеты из карманов и чехлов стали потихоньку перебираться на тело носителя. Также можно добавить протезы разных частей тела. Но многие сейчас скажут, что протезы были и в прошлом. Да, это действительно так, но современные протезы сравнимы с компьютерами, они более функциональны и может, даже менее громоздкие, и самое важное — они более эффективные и функциональные. И это является самым ярким примером слияния человека с машиной, но на подобное не все здоровые и «целые» люди согласятся, так как данные протезы не могут заменить полноценно части или целой конечности.
То есть почти всех людей со смартфоном и умными часами можно назвать киборгами? Нет, термин «киборг» применимо в случае, когда при различных причинах прибегли к операциям, в которых применялось взаимодействие организма с техникой для некоторого восстановления утраченного функционала тела и полноценного существования.
Примеры внедрения имплантов
Впервые нервную систему человека подключили к компьютеру в 2002 году. Эта честь выпала Кевину Уорвику, профессору кибернетики британского Университета Рединга, который решился на операцию в исследовательских целях. Хирурги вживили ему в руку устройство с сотней электродов, соединив их со срединным нервом [7].
До этого подобные эксперименты проводили исключительно на животных. Посредством нейронного интерфейса Уорвик смог управлять искусственной рукой и компьютеризированным инвалидным креслом. В результате профессор получил статус первого в мире киборга.
Со временем инженеры и врачи стали подключать к нервной системе электронику, чтобы помогать парализованным пациентам, и уже добились некоторых успехов. В 2014 году 23-летнему американцу Яну Баркхарту вернули частичную подвижность руки с помощью техники. В головной мозг парня вживили микрочип и соединили его проводами и датчиками с мышцами руки, чтобы обеспечить обмен импульсами в обход поврежденного спинного мозга. Над технологией ведут работу сотрудники Медицинского центра Векснера и некоммерческой организации Battelle.
Нейрокомпьютерные интерфейсы также применяют для создания искусственных конечностей, управляемых силой мысли. Современные высокотехнологичные протезы [8], как правило, двигаются в соответствии с сигналами в мышцах, к которым они подключены. Но в особенно сложных случаях, когда необходимые мышцы у пациента отсутствуют или не функционируют, бионические конечности подключают прямиком к нервной системе с помощью вживленных имплантов.
Когда речь идет о потере зрения, и традиционная медицина остается не у дел, единственным шансом больного становится имплантация электронных элементов, подключенных к зрительной коре. В 2015 британские хирурги успешно провели уникальную операцию на глазу 80-летнего Райана Флинна, почти утратившего зрение из-за возрастного поражения сетчатки. Мужчине поставили один из передовых имплантов Argus II, разработанный американской компанией Second Sight. Устройство принимает изображение из видеокамеры, прикрепленной к очкам, конвертирует его и направляет в мозг. Восстановленное зрение сложно сравнивать с полноценным, но все же оно позволяет Флинну ориентироваться в пространстве.
Индивидуальный проект
Выполнив анализ доступных направлений киборгизации, не связанных с генной инженерией и медицинским вмешательством для внедрения (имплантации) искусственных органов (технических элементов, протезов), а также принимая во внимание существующую ситуацию с функциональным протезированием конечностей человека, мною принято решение о создание макета бионического протеза кисти руки человека.
Целью работы является создание макета бионического протеза кисти руки человека, позволяющего частично возмещать функции утраченной конечности. Основными органами человеческого организма, позволяющими воздействовать на окружающую среду, являются руки. Утрата одной или двух конечностей приводит к большому дискомфорту в повседневной жизни и даже делает человека недееспособным. Поэтому создание бионических протезов крайне актуальная задача.
Для реализации цели изучил строение кисти руки и механику движений пальцев; выбрал материал и способ изготовления; изучил теорию 3D моделирования и 3D печати; выполнил 3D модели деталей кисти руки; распечатал детали на 3D принтере и собрал макет бионического протеза кисти руки.
Все протезы руки разделяют по нескольким критериям: по назначению, по уровню ампутации, по принципу работы и по виду кисти.
По назначению
– Функциональные — активные протезы, которые позволяют выполнять хват. Управляются посредством различных механизмов.
– Косметические — выполняют только пассивную декоративную функцию, имитируют настоящую руку.
По уровню ампутации : протезы пальца; протезы кисти; протезы предплечья; протезы плеча (и при вычленении плечевого сустава);
По принципу работы : Активный (тяговый) протез позволяет освоить некоторые точные движения. Можно научиться писать ручкой или пользоваться столовыми приборами. Бионические (малоэлектрические) протезы — наиболее прогрессивные, появившиеся на стыке трёх наук: робототехники, механики и биологии. Они максимально приближены к действию человеческой руки и значительно повышают качество жизни. Благодаря им, люди в совершенстве осваивают такие сложные действия, как приготовление еды, завязывание шнурков, рисование, работа за компьютером. К минусам бионических рук относится их высокая стоимость.
По способу крепления к культе конечности: с помощью силиконового чехла и замка; с помощью анатомической формы приёмной гильзы; с помощью ремней (бандажа).
По виду кисти, из которых состоит протез: односхватные протезы — первые образцы вышли в 1970–1980 годах, управляются с помощью ЭМГ-электродов, которые считывают мышечную активность. Многосхватные , или мультифункциональные кисти — современные протезы, которые управляются также с помощью ЭМГ-электродов, но имеют сложный алгоритм управления. Многофункциональные кисти обладают расширенными возможностями, могут менять жесты и, что не менее важно, взаимодействовать с цифровым миром (бесконтактная оплата, возможность использовать искусственный интеллект для управления и софт для самостоятельной тренировки и реабилитации). Но многофункциональные протезы могут не подойти в некоторых случаях. Устройство не будет работать, если мышечная система рук развита слабо или с момента ампутации конечности прошло много времени. Мышечная ткань полностью атрофировалась, превратившись в соединительную или нарушена связь между головным мозгом и конечностями. Это может произойти в результате черепно-мозговой травмы или сосудистых заболеваний, приводящих к нарушению кровоснабжения головного мозга, например, ранении или при инсульте.
Протезирование для инвалидов в России из-за отсталой системы обеспечения средствами реабилитации, высокотехнологичные искусственные устройства недоступны для людей с ограниченными возможностями в России. За счет фонда социального страхования (ФСС) можно получить только косметические нефункциональные конечности или простые механические протезы, в редких случаях — протез с внешним источником энергии.
Согласно законодательству, все граждане РФ с инвалидностью имеют право на получение технического средства реабилитации (ТСР) за счет государства. Именно для таких вещей мы все с вами платим налоги и взносы, несем коллективную ответственность и можем получать коллективную поддержку в случае необходимости. Протез за бюджетные деньги можно получить двумя путями:
- Приобрести протез самостоятельно и после получить компенсацию за него от государства. Основная проблема этого варианта в том, что в некоторых регионах инвалидам компенсируют не всю сумму, затраченную на протез. Размер компенсации зависит от суммы последнего реализованного конкурса. А в таких конкурсах побеждает протез, который стоит меньше всего. Часто в победители выходит какой-нибудь разработанный в 70-х протез.
- Получить протез через государственные закупки. Процедура получения хорошего протеза за госсчет — это, как правило, долгая и сложная процедура и далеко не все инвалиды получают именно то, что они хотят. Успех этого мероприятия сильно зависит от благосостояния региона — в Москве и Петербурге получить бионику намного проще, чем в провинции.
Поскольку существующие технологии в медицине не позволяют восстановить утраченные конечности, изделия будут актуальны.
Выбор и изготовление модели активного протеза руки. Изделие должно отвечать некоторым требованиям:
- протез должен быть прочным и лёгким для ношения его в течение дня. (металл не подходит).
- протез должен сохранять работоспособность под водой, в идеале иметь положительную плавучесть при утере протеза под водой и последующих его поисках (металл и древесина не подходят).
- для уменьшения габаритов, выполнить протез кисти с запястным суставом.
- возможность дальнейшей модернизации модели бионического протеза руки.
В качестве образца для изготовления макета был взят бионический протез ProstheticHand –Bowden (тип Боуден). В котором привод сгибания пальцев осуществляется посредством гибкой нити (струна, леска, трос), при этом кисть можно выполнить достаточно тонкой.
С 2010 года в России распространяются 3D принтеры (станок с числовым программным управлением), позволяющие изготавливать детали методом послойного спекания пластиковой нити (FDM — FusedDepositionModeling). В настоящее время в Астрахани имеется несколько студий позволяющих напечатать изделия следующими видами пластика. В качестве материала для изготовления принят PET-G пластик т. к. имеет необходимые характеристики: атмосферостоек, высокая жесткость и твердость, стойкий к кислотам и щелочам, хорошо моется и стерилизуется, не токсичен и гипоаллергенен (отсутствует аллергическая реакция). В ходе работы были мною изучены боуден-модели, представленные в сети интернет на различных специализированных площадках.
Проектирование деталей производилось в Российской системе автоматизированного проектирования (САПР) «КОМПАС-3D LT»— это система трехмерного моделирования для домашнего использования и учебных целей, облегченная версия профессиональной системы «КОМПАС-3D» и позволяет создавать точные трехмерные модели деталей и чертежи. «КОМПАС-3D» широко используется для проектирования изделий основного и вспомогательного производств в таких отраслях промышленности, как машиностроение (транспортное, сельскохозяйственное, КОМПАС-3D
энергетическое, нефтегазовое, химическое и т. д.), приборостроение, авиастроение, судостроение, станкостроение, вагоностроение, металлургия, промышленное и гражданское строительство, товары народного потребления и т. Для распечатки деталей был использован домашний 3D принтер фирмы FlyingBear модель Ghost 5 (Китай), с объёмом печати: 250 мм. по оси Х, 210 мм. по оси Y, 200 мм. по оси Z. Для него характерна простота управления, высокий уровень безопасности, достаточно компактный размер и профессиональное качество печати с точностью слоя до 0.06.мм.
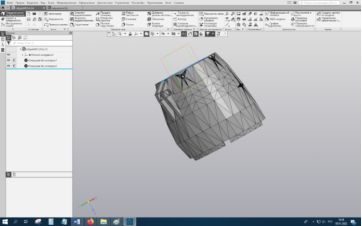
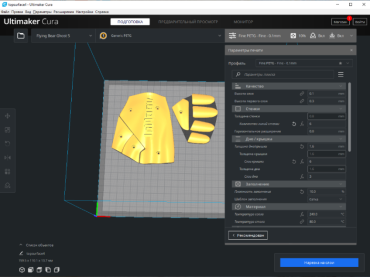
Рис. 1. 3D-принтер фирмы FlyingBear модель Ghost 5
Принтер поставляется с программным обеспечением Cura (Кура), которое позволяет максимально быстро и качественно подготовить задание для печати. Cura — это программа-«слайсер», которая «нарезает модель на слои для их последующей печати. В программе задаётся температура плавления пластика (для PET-G это 240 О С), температура подогрева рабочего стола для прилипания первого слоя (70–80 О С), скорость обдува модели для её программа-«слайсер» Cura послойного остывания, толщины внешнего слоя изделия (0.8 мм.) и множество других параметров, которые нужно экспериментально подобрать для качественной печати изделий. в итоге модель можно посмотреть «нарезанной» для исключения ошибок при печати.
Распечатка моделей производилась толщиной слоя 0.2 мм, при заполнении модели внутреннего объёма на 20–25 %, что позволило (за счёт замкнутого объёма воздуха в модели) придать ей возможность находиться на поверхности воды.

Рис. 2
Распечатанные модели требуют постобработки: снятие деталей с подложки, механическая обработка, при необходимости химическая и термическая обработка элементов для придания эстетического вида и прочности элементов конструкции. Окрашивание модели не предусматривается в целях ознакомления аудитории с технологией 3D печати (в том числе для уменьшения стоимости изделия).


Рис. 3
Произведена сборка протеза. Механическая часть протеза кисти руки готова. Движение элементов протеза осуществляется механическим способом через струны.
Стоимость затраченных материалов составила не более 1 тыс.рублей.
- Выбор и изготовление модели бионического протеза руки
По завершению сборки активного протеза было принято решение по созданию прототипа бионического протеза кисти руки.
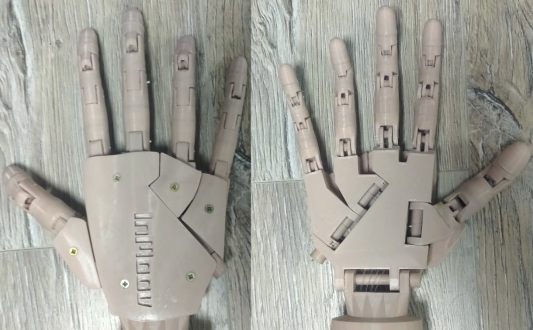
Рис. 4
Выполнив анализ лицензий для некоммерческого использования и последующего изменения модели, была выбрана модель активного протеза In Moov французского дизайнера Гаэля Лангвини (Gael Langevin) http://inmoov.blogspot.com, http://www.inmoov.fr. В модели были заменены металлические штифты на пластиковые втулки для уменьшения массы модели и возможности использования в воде (без электронного оборудования и аккумуляторов). Для этого прототипа был выбран пластик PET-G телесного цвета.
В разработанной и изготовленной конструкции протеза кисти для более комфортного и функционального её использования, по сравнению с активным протезом, обладает сервоприводами, что позволяет сгибать ладонь протеза за счёт электроники.
Управление рукой выполнено на базе микросхемы ESP_12E на процессоре ESP8612. Для сгибания пальцев протеза применялся сервопривод SG-90 с тяговым усилием 2 кг. Источником питания является аккумуляторUltra Fire 16340 на 3,6 В.

Рис. 5

Рис. 6
Сервопривод «SG90» Схема подключения компонентов
S1 — включение схемы
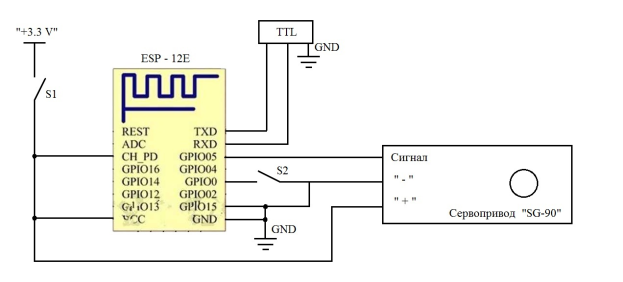
Рис. 7
S2 — переключение микросхемы в режим программирования
На микросхеме были отдельно выведены контакты RX, TX, GNO для программирования, при замыкании контактов S2 (в готовом устройстве выполнено перемычкой). Программирование микросхемы выполнено на языке «С» в среде Arduino.IDE.
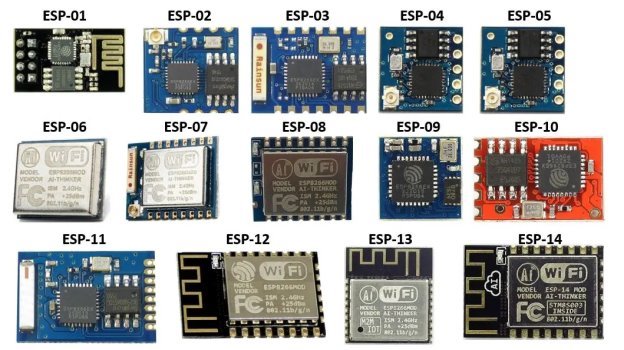
Рис. 8
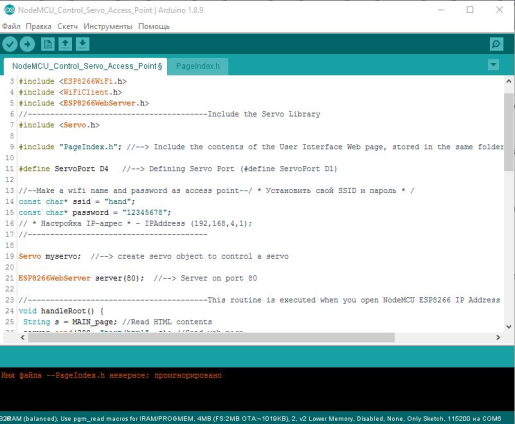
Рис. 9. Среда программирования Arduino.IDE



Рис. 10. Конечный результат сборки бионического протеза
Произведена сборка протеза. Механическая часть протеза кисти руки готова. Движение элементов протеза осуществляется сервоприводом через струны.
В ходе работы были освоены навыки поиска необходимого оборудования, материала, инструмента. Освоены механическая и термическая постобработка элементов конструкции.
В результате выполнения проекта достигнуты следующие результаты:
– изучены конструкции протезов отечественных и зарубежных производителей, принцип работы бионических протезов и их основные функции;
– освоена работа в системе трехмерного моделирования деталей «КОМПАС-3D LT»;
– использование программной среды Arduino.IDE
– на основе аналога созданы 3D модели элементов конструкции бионического протеза руки;
– освоена работа на 3D принтере;
– на основе созданных моделей конструкции распечатаны детали на 3D-принтере FlyingBear модель Ghost 5;
– произведена модификация конструкции аналога: использованы более лёгкие шарниры на месте сгибания фаланг пальцев.
Таким образом, применяя полученные навыки 3D моделирования и 3D печати, удалось изготовить прототипы бионических протезов кисти руки. Совершена некоторая модификация протеза относительно аналога. В дальнейшем потребуется доработка точности движения. Интересно также и реализовать движение пальцев отдельными сервоприводами, например, через платы Arduino или MyRio. В этом случае требуется подбор двигателей и разработка программного обеспечения.
Литература:
- URL: http://www.thingiverse.com/thing:18802282
- T-FlexCAD 2D. Двухмерное проектирование и черчение. Руководство пользователя. –АО «Топ системы», 2015.
- T-FlexCAD 3D. Трехмерное моделирование. Руководство пользователя. –АО «Топ системы», 2015.
- URL: http://3dtool.ru/product/picaso-3d-designer-new/?yclid=18278937133347248736.5
- URL: http://portal.tpu.ru:7777/SHARED/k/KTG/Uchrab/Tab
- URL: http://www.novsu.ru/file/415302.
- http://www.kevinwarwick.com/
- https://disgustingmen.com/tehno/modern-prosthetic-limbs-movie-stars-singers

