Введение
Вопрос энергоэффективности транспортных систем не теряет своей акутальности, т. к., в частности, остается актуальной проблема быстрого истощения их энергетического запаса (топлива, заряда аккумуляторных батарей). Для наземного транспорта увеличение энергоэффективности, должно привести к увеличению пробега, проходимого на одной заправке топливных баков (однократном заряде аккумуляторных батарей). Научно-исследовательские и опытно-конструкторские работы (НИОКР), касающиеся увеличения энергоэффективности, например, электротранспорта имеют два направления: 1) исследования в области непосредственно источников энергии — аккумуляторных батарей («аккумуляторное» направление) [1]; 2) исследования, касающиеся оптимизации характеристик транспортного средства и режимов его эксплуатации («оптимизационное» направление) [2].
Методы
В настоящей статье приведены результаты исследований, связанных со вторым, «оптимизационным», направлением, определяющим энергоэффективность: влияние твердости дорожного покрытия на динамику движения колесного транспорта. Методика исследований заключалась в установлении зависимости пути, проходимого электромобилем (рис. 1) с отключенным двигателем до полной остановки (пробега накатом), от твердости дорожного покрытия. Эксперименты проводились на участках дорог с различным дорожным покрытием (грунт, асфальт, бетон) при одинаковых погодных и прочих равных условиях.
![Электромобиль Гольф кар GEM 3 [2]](https://articles-static-cdn.moluch.org/articles/y/5476/images/5476-1.jpeg)
Рис. 1. Электромобиль Гольф кар GEM 3 [2]
Результаты и обсуждение
Испытания проводились на электромобиле Гольф кар GEM 3 (рис.1) при значении давления шин 2,2 бар, рекомендованном производителем. Геометрические дорожные параметры для всех трех типов покрытий (грунт, асфальтобетон, цементобетон) были одинаковыми: свободные ровные горизонтальные участки дороги. Для получения статистически значимых результатов для каждого покрытия выполнялось по пять испытаний. Числовые значения условной твердости покрытий принимались согласно справочной литературе [3].
Во всех трех сериях испытаний (на разных покрытиях) электромобиль разгонялся до скорости 20 км/ч. Это и была начальная скорость на участке движения накатом. После того как достигалась указанная скорость электромобиль отключался от электродвигателя, т. е. переводился в режим наката. После чего фиксировались пройденные до полной остановки расстояние (путь) и время (таблица 1).
Таблица 1
Результаты измерений
|
Тип покрытия |
Твердость, усл. ед. |
Среднее расстояние наката, м |
Время движения, с |
|
Грунтовая дорога |
40 |
45,8 |
16,9 |
|
Старый асфальт |
65 |
78,4 |
28,5 |
|
Цементобетон |
85 |
82,7 |
29,8 |
Из табл. 1 можно видеть, что с увеличением твердости дорожного покрытия путь, проходимый электромобилем накатом, и время этого движения увеличиваются. Для твердых дорожных покрытий (асфальт, бетон) в сравнении с «грунтовкой» относительное увеличение имеет значение в интервале 1.5÷2.0. Поэтому, очевидно, что с точки зрения энергосбережения эксплуатация электромобиля более выгодна по дорогам с твердым покрытием.
Все связано с характером процессов энергообмена в системе колесо-дорога [4]. Во-первых, на твёрдой поверхности (асфальт, бетон) энергия на «вдавливание» материала покрытия под действием нагрузки от колеса (создание колеи) меньше, чем на нежесткой (мягкой) поверхности (песок, снег, грунт). Во-вторых, автомобиль тратит существенную энергию на «выкатывание» колеса из постоянно образующейся под ним «ямки» (по терминологии дорожников — чаши прогиба) и в случае менее жесткого покрытия эта энергия выше (т. к. чаша прогиба глубже). В итоге со снижением твердости дорожного покрытия накат автомобиля уменьшается.
Разберемся в характере зависимости проходимого накатом пути
S
от твердости покрытия
T
. Предположим, что в первом приближении проходимый накатом путь
S
линейно зависит (прямо пропорционален) твердости покрытия:
S

И так, получается, что для относительно малых твердостей дорожного покрытия (грунт-асфальт) можно с достаточной степенью точности утверждать, что путь пропорционален твердости (
S

где b — коэффициент пропорциональности, между расстоянием наката и твердостью дорожного покрытия. Очевидно, что путь, проходимый накатом зависит от начальной скорости, поэтому коэффициент b зависит от начальной скорости [2]. Например, для скорости 20 км/ч коэффициент b =78.4/65=1.206 (или 45.8/40=1.145).
Для более детального анализа зависимости S от T по данным табл. 1 построим соответствующий график (рис. 2).
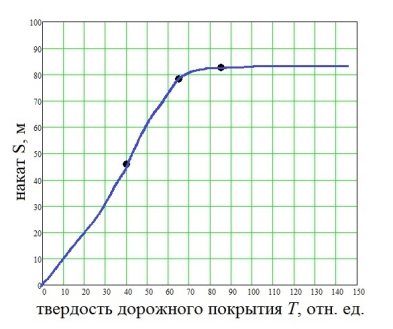
Рис. 2 . Зависимость пути оттвердости
Хотя график, построенный всего по трем точкам, имеет невысокую точность (релевантность), тем не менее характер влияния независимой величины (
T
) на зависимую (
S
) на качественном уровне отражает достаточно хорошо. Действительно, можно видеть (рис. 2), что при небольших твердостях покрытия характер зависимости практически линеен (
S
Физически это объясняется тем, что при относительно небольших твердостях (грунт-асфальт) больший вклад в поглощение механической энергии вносит деформация дорожного покрытия (доминирует над поглощением, связанным с трением, сопротивлением воздуха и деформацией шин колес). При повышении твердости дорожного покрытия его деформация уменьшается и ее вклад в рассеяние (диссипацию) кинетической энергии транспорта уменьшается. В пределе (при стремлении твердости к бесконечности) деформация покрытия и, соответственно, ее вклад в диссипацию энергии стремится к нулю: наступает «насыщение», т. е. путь, проходимый накатом перестает быть зависимым от твердости покрытия.
Таким образом, твердость дороги — значимый фактор, существенно влияющий на энергоэффективность и, соответственно, запас хода колесного транспорта на одной заправке (зарядке). Другими словами, с увеличением твердости уменьшается удельный расход топлива или электроэнергии в расчете на единицу пути, соответственно:

Заключение
В результате проведенных исследований можно сделать следующие практически значимые выводы:
- Твердость дорожного покрытия существенно влияет на движение электротранспорта накатом: увеличение твердости на 20 % приводит к увеличению расстояния наката на 15–20 %.
- Наиболее оптимальными для движения (с точки зрения энергосбережения) являются дороги с покрытиями средней и высокой твердости (70–85 усл. ед.), в нашем случае по результатам проведенного эксперимента — это цементобетонное покрытие.
- Устройство дорожных покрытий с учетом их влияния на движение транспорта может стать важным направлением в повышении его энергоэффективности.
Литература:
- Кириллов А. М., Догадайло М. Н., Белякова Е. В. Аккумуляторные батареи для беспилотных летательных аппаратов: моделирование срока службы // Вестник евразийской науки. — 2025. — Т. 17, № 6.
- Горбачева В. В., Кириллов А. М., Белякова Е. В. О физике движения накатом и энергоэффективности электромобиля // Юный ученый. — 2026. — № 2(98). — С. 73–78. — EDN RYFIQB.
- ГОСТ Р 50597–2017 «Дороги автомобильные и улицы. Требования к эксплуатационному состоянию, допустимому по условиям обеспечения безопасности дорожного движения. Методы контроля».
- Кириллов, А.М., Завьялов М. А. Моделирование процессов энергообмена в системе дорожное покрытие — транспортное средство // Инженерно-строительный журнал. — 2015. — № 5(57). — С. 34–44. — DOI 10.5862/MCE.57.3. — EDN UHLIGR.

