На сегодняшний день сложный технологический процесс человек выполнить не может. Операции, выполняемые при помощи человеческой силы будут трудо- и материалозатратные. Также важную роль играет человеческий фактор — присутствие заметных погрешностей в сравнении с точностью машины.
Роботы-манипуляторы созданы для решения сложных технических задач, которые люди не могут выполнить по определенным причинам: поднять большой вес, добраться до труднодоступных мест.
Набрав в «поисковой системе» словосочетание «Что умеет робот», можно поразиться количеством самых нестандартных задач, которые сегодня уже могут решать машины: удерживать равновесие на двух колесах, роботы дерутся, убирают у Вас дома. За каждым «умным» устройством стоит сам человек.
Рис. 1.
Робот — автоматическое устройство, созданное по принципам распознавания, удержания и перемещения объектов во вредной и опасной средах, предназначенное для осуществления различного вида операций для производства, которое действует по заранее заложенной программе и получает информацию о положении и состоянии окружающего пространства посредством датчиков, робот самостоятельно осуществляет производственные и иные вспомогательные операции, удовлетворяющие производственные потребности частично или полностью заменяющие труд человека [1].
На базе «Брянского строительного колледжа имени профессора Н. Е. Жуковского» функционирует секция научного студенческого общества «Робототехника и Электроника» с апреля 2016 г. под руководством преподавателя Комкова Сергея Сергеевича. Проект разработали студенты 3 курса специальности 09.02.01 «Монтаж наладка и эксплуатация электрооборудования ПГиЗ»
Актуальность
В рамках проекта «Доступная среда» для лиц с ограниченными возможностями осуществляется тренировка мелкой моторики, а также необходимо изолировать человека из опасной зоны при выполнении опасной и сложной работы, оператор не должен подвергаться действию опасных факторов влияющих на здоровье организма.
В связи с этим целью нашей работы стояло создание «робо-руки», которая повторяет все движения оператора
Для достижения цели были поставлены следующе задачи:
- Создание «робо-руки»
- Достижение требуемой точности манипулятора на действие оператора
- Анализ элементов схем датчиков и микроконтроллеров с целью удешевления
- На сегодняшний момент разработана «кисть». Управление изгиба пальцев манипулятора в зависимости от силы сжатия пальцев оператора. То есть «робо-рука» повторяет движение пальцев человека посредством наших «датчиков изгиба».
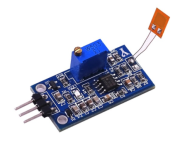
Разработка началась с изготовления сенсорной перчатки для оцифровки жестов оператора. В проекте решили использовать в качестве датчиков «тензорезистор».
Тензорезистор — резистор, сопротивление которого изменяется в зависимости от его деформации. С помощью данных датчиков можно измерять деформации механически связанных с ними элементов. Тензорезистор является основной составной частью тензодатчиков, применяющихся для косвенного измерения силы, давления, веса, механических напряжений, крутящих моментов [2].

Рис. 2. Покупной тензорезистор.
Датчиков для пяти пальцев, соответственно нужно пять. Так как «тензорезисторы» дорогостоящие, нами решено заменить «датчики изгиба» на самодельные.
Первый «датчик изгиба», сделанный нами, над которым провели опыты и испытания изготавливается из картона, клея, фольги и грифеля. Работа данного устройства основывалось на соприкосновении токопроводящей фольги и графита, нанесенного на одну из сторон картона. Чем больше соприкосновение фольги и стороны с графитом, тем больше изменяется сопротивление. В свою очередь изменение сопротивления оцифровывалось, и сигнал передавался исполнительному органу (сервопривод с углом поворота 180º). Однако данный датчик обладает рядом недостатков: низкая точность, недолговечность в использовании, большие габариты.

Рис. 3. Тензорезистор (1 версия)
«Датчика изгиба», (2 версия) в настоящий момент является основной в проекте. Принцип действия основан на изменении светового потока в замкнутой системе. Для того что бы изготовить данный датчик нам понадобится:
Рис. 4. Трубка от катетера
Трубка отрезается длинной равной длине пальца на перчатке оператора, на которую монтируются сами датчики. С одной стороны трубки помещается фоторезистор.

Рис. 5. Фоторезистор
С другой стороны — светодиод, питающим напряжением 5В.

Рис. 6. Светодиод
Устройство в сборе мы помещаем в термоусадочную трубку, для того чтобы изолировать фоторезистор от внешнего освещения. Сила света внутри трубки должна быть постоянно равной световому потоку светодиода.

Рис. 7. Термоусадка
На входе фоторезистора мы собираем ограничитель по напряжению. Подать нужное напряжение на вход фоторезистора можно программно, прежде откалибровав, или при помощи простого резистора. Выбран нами второй вариант, для упрощения программного кода.

Рис. 8. Датчик изгиба в сборе (2 версия)
Достоинства «датчика изгиба» (2 версия): дешевизна изготовления, небольшие габариты, высокая точность, простота изготовления
Нами были изучены и проанализированы цены на комплектующие элементы «датчика изгиба», представленными на рынке. Ниже приведены таблицы.
Таблица 1
Затраты на изготовления датчика
|
Позиция |
Наименование |
Цена за 1 датчик |
Стоимость за 5 датчиков |
|
|
Трубка катетера, 100мм |
1,2 руб. |
6 руб. |
|
|
Фоторезистор, 1шт |
15 руб. |
75 руб. |
|
|
Светодиод, 1шт |
3 руб. |
15 руб. |
|
|
Термоусадка, 130мм |
3,9 руб. |
19,5 руб. |
|
|
Резистор 10кОм, 1 шт |
1,8 руб. |
9 руб. |
|
Итого |
24,9 руб. |
124,5 руб. | |
Таблица 2
Сравнение цен саналогами, представленными на рынке
|
Поз. |
Наименование |
Изображение |
Цена |
|
|
Датчик изгиба (2 версия) |
|
≈25 руб. |
|
|
Тензорезистор |
|
≈1200 руб. |
|
|
Пьезоэлектрический датчик изгиба |
|
≈215 руб. |


Проект построен на платформе Arduino. Пал выбор на микроконтроллер Arduino Uno.
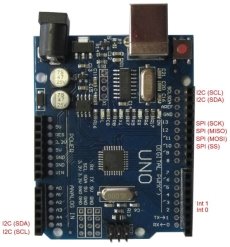
Рис. 9. Arduino Uno
Arduino Uno один из самых распространённых микроконтроллеров. Питание может получать от USB порта или от внешнего источника постоянного тока до 12В. Выходное напряжение 3,3В, 5В, 5–12В. Язык программирования С++ подобный, легок в освоении.
Используются Микросервопривод FS90 для выполнения механической работы — сжатие пальцев на «Робо-руке». Этот сервопривод позволяет установить и удерживать угол поворота колеса. Привод обладает углом поворота 180°, т. е. может быть установлен в любое положение в пределах полуокружности.

Рис. 10. Микросервопривод FS90
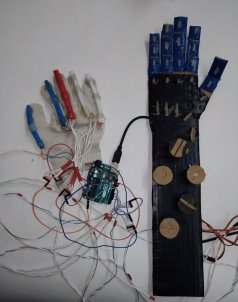
Рис. 11. Макет «Робо-руки» и сенсорной перчатки
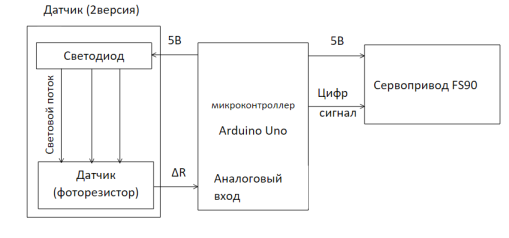
Рис. 12. Структурная схема проекта (один датчик)
Вывод
В результате работы нами была создан макет «Робо-руки», которая повторяет движение оператора, представленная на рисунке 9. Макет манипулятора находится в постоянной модернизации и реконструкции.
Литература:
- Робот https://ru.wikipedia.org/wiki/Робот (Дата обращения 20.12.2017)
- Тензорезистор https://ru.wikipedia.org/wiki/Тензорезистор (Дата обращения 20.12.2017)

