




Расширение сферы применения промышленных роботов, их возрастающий искусственный интеллект не уменьшает актуальность проблем обеспечения безопасности труда. Рассмотрена система технического зрения, выделены основные причины аварийной ситуации и требования, предъявляемые к безопасности труда.
Ключевые слова: промышленный робот, безопасность труда, система технического зрения.
Приводим определение промышленные роботы (ПР): автоматический манипулятор, осуществляющий перепрограммируемые перемещения в пространстве, многофункциональный, способный выполнять обработку и ориентацию материалов, деталей, инструментов или специализированных устройств в процессе разнообразных перемещений назначенный для достижения разнообразных целей, состав входят одна или несколько рук, на концах которых имеется схват. Управляющая система ПР включает в себя запоминающее устройство (ЗУ) и при необходимости, устройства для восприятия различной информации об условиях окружающей среды с целью адаптации. Эти многофункциональные устройства разработаны, главным образом, для выполнения в виде повторяющихся циклов заданной функции и могут быть перестроены для выполнения других функций без существенной модификации устройства.
Основными причинами, формирующими опасные, критические и аварийные ситуации при эксплуатации ПР, являются:
1. непредусмотренные движения исполнительных устройств промышленных роботов при наладке, ремонте, во время обучения и исполнения управляющей программы;
2. внезапный отказ в работе промышленного робота или технологического оборудования, совместно с которым он работает;
3. ошибочные (непреднамеренные) действия оператора или наладчика во время наладки и ремонта, при работе в автоматическом режиме;
4. доступ человека в рабочее пространство робота, функционирующего в режиме исполнения программы;
5. нарушение условий эксплуатации промышленного робота, роботизированного технологического комплекса;
6. нарушение требований эргономики и безопасности труда при планировке роботизированного технологического комплекса и участка (размещение технологического оборудования, промышленных роботов, пультов управления, загрузочных и разгрузочных устройств, накопителей, тары, транспортных средств и других средств технологического оснащения).
На проблему безопасности оказывают влияние следующие аспекты: изменяемое число степеней подвижности, свободная программируемость направлений перемещения, свободная программируемость скоростей. Стоит отметить основные виды опасности для здоровья и жизни обслуживающего персонала: механические повреждения, электротравмы, ожоги, химические травмы. Требования безопасности следует учитывать уже на этапе проектирования таких элементов, как схваты, руки, узлы сочленения, это особенно важно при значительности перемещаемых масс и скоростей. Необходимо предусматривать специальные устройства торможения (демпфирования в условиях значительных изменений нагружения, специальные меры выравнивания перемещаемых масс при значительных динамических нагрузках). В систему программирования и управления необходимо встраивать специальные диагностирующие средства и алгоритмы. Для обеспечения безопасности требуется использовать средства механической защиты в виде средств ограждения рабочей зоны ПР, использования специальных датчиков, фиксирующих направление, наличие посторонних предметов в рабочей зоне, электрокабели должны иметь покрытие, устойчивое к воздействию агрессивных сред, штепсельные разъемы должны быть герметичны. Так же необходимо проводить анализ работы ПР в составе автоматизированных линий с целью выявления так называемой «скрытой» опасности, которая может возникнуть при совместной работе ПР с элементами автоматической линии.
Мы предлагаем большее внимание уделять вопросам использования в промышленности различных сенсорных систем, в частности систем технического зрения (СТЗ). Типичными задачами, требующими зрительного очувствления являются зрительная инспекция продукции, контроль и управление процессами, робототехнические задачи, связанные с манипулированием заготовками, автоматизированной сборкой (рис.1).
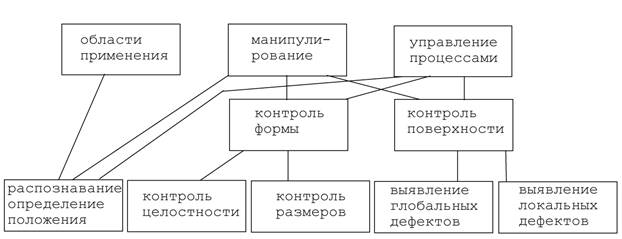
Рис. 1. Взаимосвязь различных областей применения и задач зрительных систем в производстве
Применение, СТЗ особенно перспективно там, где возможности человеческого глаза (быстродействие, точность, надежность, объективность и т. д.) оказываются недостаточными, где технические и организационные альтернативы приводят к значительно большим затратам. Так например применение СТЗ в процессе сборке автомобилей см. рис.2

Рис. 2. Применение СТЗ на автомобильном заводе
В области манипулирования деталями и автоматизированной сборки можно выделить две группы задач:
1. измерение относительного смещения (инструмент — деталь, деталь — деталь) неточно позиционируемых объектов (например, деталей в паллетах) или определение геометрических параметров формы детали;
2. распознавание деталей и определение их положения.
Измерение смещения производится при автоматической сборке узлов.
Бесконтактное зрительное измерение особенно важно при монтировании деталей на крупном и тяжелом основании, как, например, при сборке автомобиля, когда альтернативные методы, связанные с повышением точности фиксаций узла и уменьшением допусков, оказываются экономически невыгодными. Характерными примерами являются отыскание начала шва при сварке и навеска колес.
Решение задач второй группы необходимо, в частности, при кассетировании неупорядоченных деталей роботом. Эти детали могут располагаться на плоскости либо быть в беспорядке сваленными в бункер. В настоящее время задача «разбора навала» (в бункере) представляется менее важной. Ни одна из существующих на настоящий момент систем не в состоянии удовлетворительно ее решить.
Целесообразность применения зрительных систем при контроле производственных процессов обусловлена тем, что в условиях современного высокопроизводительного производства человек не может обеспечить стопроцентный контроль всех операций. В результате брак обнаруживается слишком поздно, что приводит к большим потерям материалов и средств. Области применения СТЗ при контроле процессов включают в себя: контроль поверхностей на производственных линиях (прокат, производство стекла, пластиков, тканей), слежение за швом (сварка, склейка, полировка), измерение распределения размеров изделий, контроль состояния инструмента; контроль рабочей зоны.
В области визуальной инспекции типичными применениями СТЗ являются: контроль отливок на отсутствие трещин, контроль листового стекла (волнистость, вкрапления), контроль печатных плат и масок в электронной промышленности, контроль кабелей и др. [1–6]
Таким образом, мы приходим к выводу, что для безопасности использования промышленных роботов необходимо применять различные сенсорные системы, например рассмотренную нами систему технического зрения. Кроме того, средства защиты должны создаваться, исходя из учета различного характера деятельности персонала, работающего с ПР и высокой эксплуатационной надежностью таких средств, при этом затраты на их реализацию должны быть экономически оправданы.
Литература:
1. Федотов А. Г., Поезжаева Е. В., Заглядов П. В., Безопасность труда при взаимодействии с промышленными роботами//Экология и научно-технический прогресс. Урбанистика,2014,стр. 14–15.
2. Поезжаева Е. В. Промышленные роботы: учеб.пособие: в 3 ч./ Е. В. Поезжаева. — Пермь Изд-во Пермь.гос, тех. ун-та, 2006.- Ч.1.-64 с.
3. Зенкевич С. Л., Ющенко А:.С. Управление роботами.- М.:Изд-во МГОУ им. Н. Э. Баумана, 2006.
4. Корендясев А. И. Теоретические основы робототехники: в 2 кн./ А. И. Корендясев, Б. Л. Саламандра, Л. И. Тывес; отв. Ред. С. М. Каплунов.– М.:Наука,2006.
5. Хорн Б. К. Зрение роботов.– М.:Мир,1989.
6. Михайлов С. В., Романов В. В., Заикин Д. А., Система технического зрения для диагностики процесса резания материалов//Вестник компьютерных и информационных технологий.,2007,№ 4,стр 23–26
