В наше время, когда человек освоил не только небо, но и приступил к исследованию космического пространства, изучение поверхности Земли не потеряло своей актуальности и приобрело новые масштабы.
На орбиту нашей планеты на данный момент выведено около сотни космических летательных аппаратов, работающих над дистанционным зондированием нашей планеты.
Дистанционное зондирование Земли (ДЗЗ) — это процесс, в ходе которого собираются данные о Земле и объектах на ее поверхности без непосредственно контакта с помощью аппаратуры, установленной на космических аппаратах, самолетах или других летательных объектах.
К ДЗЗ могут относиться не только снимки непосредственно поверхности планеты, но и изображения, получаемые в одном или нескольких разделах электромагнитного спектра. Помимо видимой области спектра, снимки могут быть получены в радиодиапазоне и инфракрасном спектре.
ДЗЗ играет большую роль в решении множества задач в различных сферах человеческой жизнедеятельности. Землепользование и сельское хозяйство, получение данных для составления карт неизученных участков земли или водного пространства, нахождение необработанных нефтегазовых месторождений, военная разведка — во всех этих, а также многих других областях применяются снимки ДЗЗ.
К сожалению, на данный момент на орбите Земли находится недостаточное количество спутников для решения множества задач, которые стоят перед дистанционным зондированием. Требуется постоянная разработка новых, удовлетворяющих современным требованиям модулей, работающих на основе ПЗС-фотоприемников (ФПЗС).
ФПЗС по своим возможностям являются многофункциональными приборами, что и позволило объединить оптические системы и цифровые электронные процессоры в общую конструкцию, получившую название оптоэлектронные преобразователи с ФПЗС.
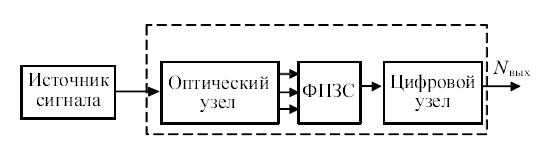
Рис. 1. Структурная схема оптоэлектронного преобразователя
Свет, который является источником сигнала, поступает на оптический узел, откуда в режиме реального времени попадает на ФПЗС, откуда в виде последовательности отсчетных сигналов поступает на цифровой узел. [1]
В данной статье особое значение уделяется, как раз процессу приема видеосигнала с ФПЗС для дальнейшей обработки и передачи изображений.
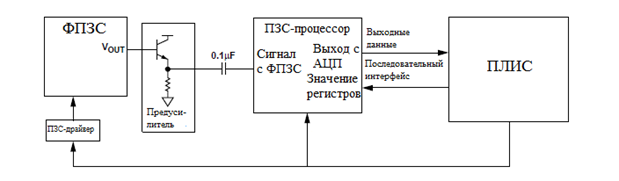
Рис. 2. Функциональная схема цифрового узла
В качестве языка описания для разрабатываемого модуля был выбран высокоуровневый язык Verilog HDL. Для исследования аппаратной реализации использовалась ПЛИС типа FPGA семейства Virtex 5, разработанной фирмой Xilinx. В качестве среды проектирования была выбрана ISE Design Suite, соответствующая данной ПЛИС.
При поступлении сигнала с ФПЗС главной задачей является обработка поступающего сигнала. Так как вместе с сигналом поступают и шумы, то нам необходимо от них избавиться.
Для устранения шумов используют метод двойной коррелированной выборки сигнала (ДКВ). Концепция ДКВ основана на том факте, что в видеосигнале и опорном сигнале существует одна и та же шумовая компонента. А именно, когда выходной каскад ПЗС‑матрицы переносит зарядовый пакет, он преобразуется в выходное напряжение. Для этого используется плавающая считывающая диффузия, чтобы собирать зарядовые пакеты сигнала при их переносе с ПЗС‑матрицы. По мере переноса зарядовых пакетов напряжение на считывающей диффузии падает. Это напряжение представляет собой данные видеосигнала и усиливается на матрице усилителем с термокомпенсацией. Прежде чем следующий зарядовый пакет сможет быть перенесен в область диффузии, она должна быть полностью очищена от предыдущего пакета. Это выполняет опорный сигнал сброса, который содержит такую же компоненту теплового шума, что и видеосигнал матрицы. Если заранее сохранить эту компоненту шума, то потом ее легко вычесть из результирующего сигнала, который содержит шум и полезный сигнал. [2]
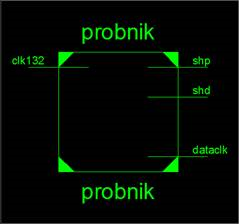
Рис. 3. Символьное изображение модуля, реализующего ДКВ
ДКВ лучше всего работает при использовании двух быстродействующих цепей выборки и фиксации, подсоединенных к выходному сигналу фотоприемника через низкочастотный фильтр.
При поступлении сигнала с ПЗС сигналы SHP и SHD принимают значение «1» при разных значениях.
Сигнал SHP используется для фиксации опорного уровня. Сигнал SHD используется для фиксации уровня данных, поступающих с ФПЗС. Сигнал Dataclk необходим для тактирования АЦП, а также для снятия необходимых данных. [3]
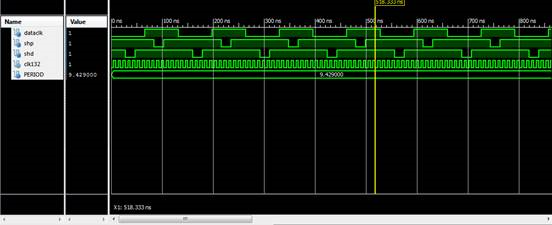
Рис. 4. Результаты функционального моделирования
Следующей задачей являлась реализация модуля приема команд усиления по интерфейсу из блока управления, а также их запись в АЦП.
Усиление происходит в диапазоне от 6 до 40 дБ с помощью 10-битного АЦП через интерфейс.
Минимальное усиление в 6 дБ необходимо для того, чтобы соответствовать входному сигналу в 1 В с АЦП при полномасштабном диапазоне АЦП в 2 В.
Формула для расчета значения усиления в дБ:
 , (2)
, (2)
где Ку — значение коэффициента усиления в децибелах,
Ку_код — код коэффициента усиления.
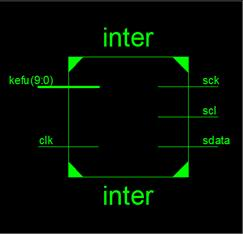
Рис. 5. Символьное изображение модуля, производящего усиление
На вход, кроме тактовой частоты, необходимой для работы, подается шина, содержащая кодовое значение коэффициента усиления.
kefu [9:0] — шина со значением коэффициента усиления.
В свою очередь, на выходе необходимо получить три сигнала: SCK — сигнал, совпадающий с сигналом тактовой частоты; SL — сигнал, который имеет значение «0» при всех загруженных регистрах системы; SData — выходной сигнал, который представляет собой последовательность битов адреса, тестового бита и битов данных со значением коэффициента усиления.
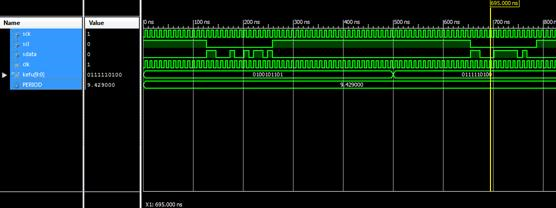
Рис. 6. Результаты функционального моделирования
Стоит отметить, что реализованная система модулей является лишь частью огромной системы электронных модулей, которые входят в состав космических аппаратов для дистанционного зондирования Земли.
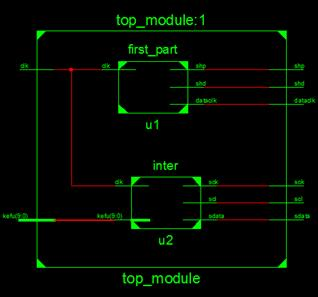
Рис. 7. Символьное изображение итогового модуля
В сумме проект занял менее 1 % процента ПЛИС. Это легко объясняется тем, что данные модули являются всего лишь частью системы модулей, которые используются в космических аппаратах для дистанционного зондирования Земли.
Литература:
1. Молодняков С. А. Оптоэлектронные процессоры с ПЗС-фотоприемниками. Конвейерная обработка сигналов // Информационно — управляющие системы. Вып. 6 М: 2008. — С.1,4
2. Дамьяновски В. CCTV. Библия видеонаблюдения. Цифровые и сетевые технологии // М: Ай-Эс-Эс Пресс, 2006 — С.42
3. http://www.analog.com/media/en/technical-documentation/data-sheets/AD9943_9944.pdf Дата посещения — 10 июня 2015 г.

